A reach & grasp approach for object manipulation with mechanical - PowerPoint PPT Presentation
A reach & grasp approach for object manipulation with mechanical hands Daoud N., Touvet F., Gazeau J-P., Eskiizmirliler S., Zeghloul S., Maier M. A. Grasp Planning and Task Learning by Imitation Workshop IEEE IROS 2010, October 18, Taipei
A reach & grasp approach for object manipulation with mechanical hands Daoud N., Touvet F., Gazeau J-P., Eskiizmirliler S., Zeghloul S., Maier M. A. Grasp Planning and Task Learning by Imitation Workshop IEEE IROS 2010, October 18, Taipei Tuesday, October 19, 2010 1
ABILIS : Bioinspired approaches for intelligent handling and gripping Naël Daoud Jean-Pierre Gazeau François Touvet Marc Maier Tuesday, October 19, 2010 2
Materials 16 dof 4 fingers fully actuated hand Classical 6 dof industrial robot (Kuka) 4 types of objects Tuesday, October 19, 2010 3
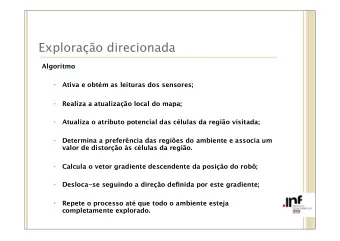
Methods The reach problem is solved by dedicated LWPR Matching Units (MUs) The grasp configuration is selected through all possibilities by a Genetic Algorithm The manipulation is considered as a serial grasp configurations Tuesday, October 19, 2010 4
Reach 3d position given by a parametrized offset from the object center of gravity 3d orientation estimated by MUs Final solution computed by the MU which learns Inverse Kinematics of the Kuka manipulator using his direct kinematics. approach angle Paulignan et.al.(8) opposition axis Arbib et.al. (9) Tuesday, October 19, 2010 5
Grasp quality criterion A triple criterion to evaluate grasp quality ◦ T1: minimization of grasp forces ◦ T2: maximization of manipulability (Yoshikawa, T., 1994) ◦ T3: maximization of distances to joints limits Tuesday, October 19, 2010 6
Grasp strategy Define C, α , and hand orientation Intersection between a random line of the Grasp plane grasp plan containing C and the object surface gives P1 P2 and P3 calculation is straight forward Grasp synthesis Tuesday, October 19, 2010 7
Genetic algorithm parameters , , 8 individuals is enough Crossover and mutation probabilities are fixed to 0.25 Most of the time, convergence is achieved in less than 50 iterations Optimal grasp is attained when the algorithm gives 5 times the same individual Tuesday, October 19, 2010 8
Simulation Results Four objects grasps were tested with different result qualities Object # of generations Com. time [sec] Cylinder 8-28 0.98-1.54 parallelepiped 14-69 1.23-4.03 with A1=0.467, A2=0.411, A3=0.475 Note: Results are influenced by object size, object type and α angle. Tuesday, October 19, 2010 9
Experimental Results Grasp of a parallelepiped object Reach & grasp of cylindrical object Equilateral grasp test by minimizing only grasp forces with A1=1, A2=0, A3=0 Tuesday, October 19, 2010 10
Conclusion A hybrid reach & grasp control approach combining bio-inspiration (LWPR) and solution space exploration (by GA) was presented. Ongoing and future work focuses on three issues: ◦ i) the concept of Matching Units has been expanded to the multi-finger (up to 5 fingers) grasp problem (submitted to ICRA 2011). It provides object-dependent top & side grasp based on learned heuristic methods of grasp kinematics. ◦ Behavioral grasp experimentations on healthy subjects are going to be performed in the aim of extracting biomimetic grasp strategies to be learned by MUs. ◦ ii) A new 4-finger hand with new-generation actuators will replace the existing hand with the goal of controlling both movement kinematics and dynamics during object-dependent reach and grasp. ◦ iii) The performance of hybrid, biomimetic and non- biomimetic control schemes will be compared on the ABILIS platform. Tuesday, October 19, 2010 11
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.