A GRASP approach for the machine reassignment problem Michal Gabay - PowerPoint PPT Presentation
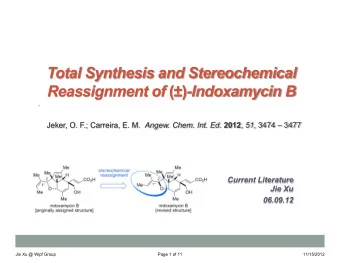
A GRASP approach for the machine reassignment problem A GRASP approach for the machine reassignment problem Michal Gabay Sofia Zaourar Laboratoire G-SCOP LJK - Inria Grenoble France Team J19 - Open source July 10, 2012 1 A GRASP
A GRASP approach for the machine reassignment problem A GRASP approach for the machine reassignment problem Michaël Gabay Sofia Zaourar Laboratoire G-SCOP LJK - Inria Grenoble France Team J19 - Open source July 10, 2012 1
A GRASP approach for the machine reassignment problem Summary 1 The problem Overview Constraints Costs 2 Our solution Scheme Vector bin packing Another approach Local search 3 Final solution Solution Results 2
A GRASP approach for the machine reassignment problem The problem Overview 3
A GRASP approach for the machine reassignment problem The problem Overview 3
A GRASP approach for the machine reassignment problem The problem Overview 3
A GRASP approach for the machine reassignment problem The problem Constraints Constraints Capacity constraints and transient usage constraints Conflict constraints Spread constraints Dependency constraints 4
A GRASP approach for the machine reassignment problem The problem Constraints Capacity constraints R2 R1 5
A GRASP approach for the machine reassignment problem The problem Constraints Capacity constraints R2 R1 5
A GRASP approach for the machine reassignment problem The problem Constraints Capacity constraints R2 R1 5
A GRASP approach for the machine reassignment problem The problem Constraints Capacity constraints R2 R1 5
A GRASP approach for the machine reassignment problem The problem Constraints Capacity constraints R2 R1 5
A GRASP approach for the machine reassignment problem The problem Constraints Capacity constraints Vector bin packing problem, Garey et al., 76 R2 R1 5
A GRASP approach for the machine reassignment problem The problem Constraints Dependency constraints s 1 depends on s 2 : N2 M2 N1 M1 P3, s3 P1,s1 N3 M4 M3 P2, s2 P4, s2 P5, s3 6
A GRASP approach for the machine reassignment problem The problem Constraints Dependency constraints s 1 depends on s 2 : N2 P1,s1 M2 N1 M1 P3, s3 N3 M4 M3 P2, s2 P4, s2 P5, s3 6
A GRASP approach for the machine reassignment problem The problem Constraints Dependency constraints s 1 depends on s 2 : N2 M2 N1 M1 P3, s3 N3 M4 M3 P2, s2 P1,s1 P4, s2 P5, s3 6
A GRASP approach for the machine reassignment problem The problem Constraints Dependency constraints Idea : break up the problem by neighborhoods ⇒ smaller subproblems with no dependency constraints. Solvable using integer programming ⇒ Matheuristic approach. 7
A GRASP approach for the machine reassignment problem The problem Costs Costs Process / Service / Machine move costs Load costs Balance costs 8
A GRASP approach for the machine reassignment problem The problem Costs Load costs x 9
A GRASP approach for the machine reassignment problem The problem Costs Load costs Use load costs to guide search x 9
A GRASP approach for the machine reassignment problem Our solution Scheme GRASP ? GRASP = Greedy randomized adaptive search procedure Optimization scheme: Create a solution using vector bin packing heuristic 1 Optimize it with a local search 2 Goto 3 10
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing ∀ m ∈ M , ∀ p ∈ P , volume v : C ( m , r ) R ( p , r ) v ( m ) = ∑ v ( p ) = ∑ C ( r ) , R ( r ) r ∈ R r ∈ R 11
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing ∀ m ∈ M , ∀ p ∈ P , volume v : C ( m , r ) R ( p , r ) v ( m ) = ∑ v ( p ) = ∑ C ( r ) , R ( r ) r ∈ R r ∈ R Greedy : First Fit Decreasing (FFD) FFD Bin-centric heuristic (Panigrahy et al., 2011): Sort machines by increasing v ( m ) , processes by 1 decreasing v ( p ) Pop the smallest remaining machine m 2 While some processes fit into m , place the largest 3 remaining one Goto 4 11
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing ∀ m ∈ M , ∀ p ∈ P , volume v : C ( m , r ) R ( p , r ) v ( m ) = ∑ v ( p ) = ∑ C ( r ) , R ( r ) r ∈ R r ∈ R Greedy : First Fit (FF) FF Bin-Balancing (item-centric) heuristic: Sort machines by increasing v ( m ) , processes by 1 decreasing v ( p ) , i = 1 Pop the largest remaining process p 2 While some machine can host p , place p on the smallest 3 j ≥ i + 1 (with a cyclic order), i = j Goto 4 11
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing ∀ m ∈ M , ∀ p ∈ P , volume v : C ( m , r ) R ( p , r ) v ( m ) = ∑ v ( p ) = ∑ C ( r ) , R ( r ) r ∈ R r ∈ R Greedy Random FF Mixed orderings heuristic: Sort machines by increasing v ( m ) , processes by 1 decreasing v ( p ) , or random sort both Run FFD Bin-centric, run FF Bin-Balancing 2 Goto 3 11
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing Constraints verified ? Capacity and transient usage constraints Conflict constraints Spread constraints Dependency constraints 12
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing Constraints verified ? Capacity and transient usage constraints ⇒ YES Conflict constraints ⇒ YES Spread constraints Dependency constraints 12
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing Constraints verified ? Capacity and transient usage constraints ⇒ YES Conflict constraints ⇒ YES Spread constraints Dependency constraints ⇒ YES - Assign all processes of a neighborhood to the same neighborhood (possibly not the original one) 12
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Vector Bin Packing Constraints verified ? Capacity and transient usage constraints ⇒ YES Conflict constraints ⇒ YES Spread constraints ⇒ REPAIR Dependency constraints ⇒ YES - Assign all processes of a neighborhood to the same neighborhood (possibly not the original one) 12
A GRASP approach for the machine reassignment problem Our solution Vector bin packing GRASP Use FF Mixed orderings to get a feasible solution 1 Local search on the solution 2 Goto 3 13
A GRASP approach for the machine reassignment problem Our solution Vector bin packing Problems with VBP VBP heuristics are very fast but... Solutions’ costs are too high Not so interesting when processes do not change neighborhood,... nor when they all change... 10 B instances, 6 feasible,... all violate spread constraints Repairing may be too difficult / time consuming 14
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic Idea: For each neighborhood , solve the assignment problem 1 using an IP (smaller subproblem with no dependency constraints) Optimize using local search 2 Goto 3 (implemented using Coin-Osi/Clp/Cbc ) 15
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Subproblems are still too big 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Subproblems are still too big Solution: Divide into smaller subproblems Randomly / Guided by load cost (most expensive machines with cheapest w.r.t. load costs) 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Tune size parameters: Compromise between time consumption and feasibility 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Tune size parameters: Compromise between time consumption and feasibility Solution: Set maximum number of machines and processes to be considered at once Set maximum number of nodes 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Pure local search is better 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Pure local search is better (and deadline approaches) 16
A GRASP approach for the machine reassignment problem Our solution Another approach A matheuristic: Problems Pure local search is better (and deadline approaches) Solution: Forget about the Matheuristic :-( 16
A GRASP approach for the machine reassignment problem Our solution Local search Local search Two simple moves: Move p from m 1 to m 2 Swap p 1 and p 2 on m 1 and m 2 Efficient Structures + randomization 17
A GRASP approach for the machine reassignment problem Our solution Local search Local search Two simple moves: Move p from m 1 to m 2 Swap p 1 and p 2 on m 1 and m 2 Efficient Structures + randomization Hill Climbing: if a move is feasible and decreases the total cost, do it! 17
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.