A method of calculating intersection of quadratic surfaces in - PowerPoint PPT Presentation
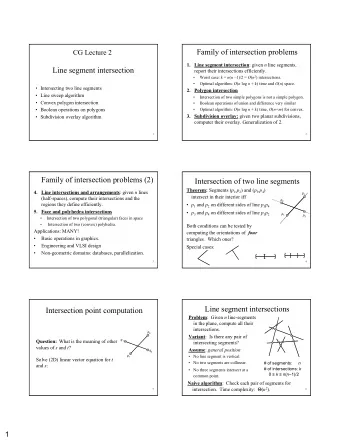
A method of calculating intersection of quadratic surfaces in quaternion algebra Przemys law Dobrowolski Warsaw University of Technology Faculty of Mathematics and Information Science Be dlewo, 24-26 May 2013 Przemys law Dobrowolski
A method of calculating intersection of quadratic surfaces in quaternion algebra Przemys� law Dobrowolski Warsaw University of Technology Faculty of Mathematics and Information Science Be ¸dlewo, 24-26 May 2013 Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Introduction An exact motion planning problem can be formulated in terms of computational geometry. In case of 3-dimensional motion planning with rotations there exists the following problem: Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Introduction An exact motion planning problem can be formulated in terms of computational geometry. In case of 3-dimensional motion planning with rotations there exists the following problem: Problem Given two non-translated quadratic surfaces in algebra of unit quaternions, compute an exact parametrization of the intersection of the two surfaces. Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Introduction An exact motion planning problem can be formulated in terms of computational geometry. In case of 3-dimensional motion planning with rotations there exists the following problem: Problem Given two non-translated quadratic surfaces in algebra of unit quaternions, compute an exact parametrization of the intersection of the two surfaces. Non-translated quadratic surface in algebra of unit quaternions will be defined later. Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Introduction General features: each non-translated quadratic surface is defined by 10 coefficients corresponding configuration space is homeomorphic to S 3 with antipodal points identified ambient space is 4-dimensional Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Quaternion algebra Quaternion algebra H An algebra of hyper-complex numbers of form: q = a i + b j + c k + d (1) which base elements i , j , k have the following multiplication rules: i 2 = j 2 = k 2 = ijk = − 1 is called quaternion algebra . Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Quaternion algebra Quaternion algebra H An algebra of hyper-complex numbers of form: q = a i + b j + c k + d (1) which base elements i , j , k have the following multiplication rules: i 2 = j 2 = k 2 = ijk = − 1 is called quaternion algebra . Note: Multiplication in quaternion algebra is non-commutative! Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Quaternion algebra We are going to use unit quaternions which can be used to represent a rotation in 3-space: Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Quaternion algebra We are going to use unit quaternions which can be used to represent a rotation in 3-space: Subalgebra of unit quaternions The subalgebra U of H such that for each q ∈ U : q ∗ q = 1 where q ∗ = − a i − b j − c k + d is called subalgebra of unit quaternions . Topology: Subalgebra of unit quaternions is a Lie algebra. It is a two-fold universal cover of SO ( 3 ) which is topologically homeomorphic to S 3 with antipodal points defined. Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Quadratic surface in quaternion algebra A non-translated quadratic surface in H can be written as a quadratic form in R 4 . Assuming that q = a i + b j + c k + d ∈ H q = [ a , b , c , d ] T ∈ R 4 there is a and its corresponding vector ¯ S : R 4 − function ¯ → R : ¯ q T M ¯ S (¯ q ) = ¯ q = 0 where a 11 a 12 a 13 a 14 a 12 a 22 a 23 a 24 M = a 13 a 23 a 33 a 34 a 14 a 24 a 34 a 44 which is equivalent to function S : H − → R : S ( q ) = a 11 a 2 + a 22 b 2 + a 33 c 2 + a 44 d 2 + 2 ( a 12 ab + a 13 ac + a 14 ad + a 23 bc + a 24 bd + a 34 cd ) = 0 it will be called shortly H -quadric. Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Intersection of quadratic surfaces in quaternion algebra The following theorem allows a person to use a simpler Cartesian intersection routines instead of hyper-complex one. Theorem Let Γ( ξ ) = [Γ x ( ξ ) , Γ y ( ξ ) , Γ z ( ξ ) , Γ w ( ξ )] T be the intersection of two quadratic surfaces in homogeneous space P 3 for ξ ∈ P 1 . Intersection of two H -quadrics is equal to: q ( ξ ) = ± Γ( ξ ) ¯ (2) � Γ( ξ ) � Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Proof Proof Assume that in H there are given two H -quadrics S 1 and S 2 with matrices M 1 and M 2 . The intersection is a set of quaternions q = [ a , b , c , d ] T satisfying: ¯ q T ¯ ¯ q = 1 q T M 1 ¯ ¯ q = 0 q T M 2 ¯ ¯ q = 0 It is impossible that all of a , b , c , d are equal to zero simultaneously because of the first equation. Assume for now that d is non-zero. The second and the third equation can be divided by d 2 , resulting in: � t T M 1 t = 0 (3) t T M 2 t = 0 Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Proof The newly introduced vector t is equal to [ a d , b d , c d , 1 ] T . It can be observed that the two equations of (3) form a quadric intersection problem in R 3 . Important note: both t T M 1 t and t T M 2 t are not necessarily quadratic forms. Since t 4 is equal to 1, each formula may contain the parameter t in the first order as well as scalars. As a result, a person must consider an intersection of two general quadrics in R 3 . This problem can be effectively solved. Both quadrics are given in terms of t x = a d , t y = b d , t z = c d . Now, we assume that the intersection curve Γ( ξ ) = [Γ x ( ξ ) , Γ y ( ξ ) , Γ z ( ξ ) , Γ w ( ξ )] T is in homogeneous coordinates: t x = Γ x ( ξ ) Γ w ( ξ ) , t y = Γ y ( ξ ) Γ w ( ξ ) , t z = Γ z ( ξ ) Γ w ( ξ ) , ξ ∈ P 1 Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Proof To recover all of a , b , c , d , first d is computed. Summing up the squares of t x , t y and t z one obtains: d 2 = a 2 + b 2 + c 2 z = a 2 d 2 + b 2 d 2 + c 2 = 1 − d 2 = 1 t 2 x + t 2 y + t 2 d 2 − 1 d 2 d 2 so, d 2 and d 2 = t 2 x + t 2 y + t 2 1 1 z + 1 = t 2 x + t 2 y + t 2 z + 1 by plugging in the intersection curve Γ , one can write: 1 d 2 = Γ w ( ξ ) 2 + Γ y ( ξ ) 2 Γ x ( ξ ) 2 Γ w ( ξ ) 2 + Γ z ( ξ ) 2 Γ w ( ξ ) 2 + Γ w ( ξ ) 2 Γ w ( ξ ) 2 Γ w ( ξ ) 2 = Γ x ( ξ ) 2 + Γ y ( ξ ) 2 + Γ z ( ξ ) 2 + Γ w ( ξ ) 2 A rotation by a quaternion q is identified with a rotation by a quaternion − q . Hence, in the above equation a square root can be taken of both sides without a loss of generality. Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Proof Finally one obtains: d = Γ w ( ξ ) � Γ( ξ ) � � Γ x ( ξ ) 2 + Γ y ( ξ ) 2 + Γ z ( ξ ) 2 + Γ w ( ξ ) 2 . The where � Γ( ξ ) � = remaining quaternion coordinates are: a = dt x = Γ w ( ξ ) Γ w ( ξ ) = Γ x ( ξ ) Γ x ( ξ ) � Γ( ξ ) � � Γ( ξ ) � b = dt y = Γ w ( ξ ) Γ w ( ξ ) = Γ y ( ξ ) Γ y ( ξ ) � Γ( ξ ) � � Γ( ξ ) � c = dt z = Γ w ( ξ ) Γ w ( ξ ) = Γ z ( ξ ) Γ z ( ξ ) � Γ( ξ ) � � Γ( ξ ) � Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Proof The above formulas can be finally rewritten as the H -quadric intersection parametrization : q ( ξ ) = ± Γ x ( ξ ) i + Γ y ( ξ ) j + Γ z ( ξ ) k + Γ w ( ξ ) � Γ( ξ ) � or, equivalently in a vector form: q ( ξ ) = ± [Γ x ( ξ ) , Γ y ( ξ ) , Γ z ( ξ ) , Γ w ( ξ )] T ¯ � Γ( ξ ) � q ( ξ ) = ± Γ( ξ ) ¯ � Γ( ξ ) � where Γ := intersect ( M 1 , M 2 ) . Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Proof A note is also needed about initial choice of d as the coordinate by which the remaining coordinates were divided. Because it is not possible that all of a , b , c , d are simultaneously zero, it is possible to non-constructively divide the H space into four subspaces in which the selected quaternion component is non-zero. In each of these fragments, the proof is repeated, regards to different quaternion component. Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Conclusions intersection of non-translated quadrics on S 3 sphere is not more difficult than intersection of general quadrics in P 3 (nevertheless, it is still a complex problem!) an ingredient for other motion planning algorithms (involving 3D rotations) Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Thank you Przemys� law Dobrowolski Intersection of quadratic surfaces in quaternion algebra
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.