Vertical Visibility among Parallel Polygons in Three Dimensions GD - PowerPoint PPT Presentation
Vertical Visibility among Parallel Polygons in Three Dimensions GD 2015 Radoslav Fulek (IST, Austria), Rado s Radoi ci c (CUNY) Visibility clique Visibility clique We consider a finite set S of translates/homothetes of two dimensional
Vertical Visibility among Parallel Polygons in Three Dimensions GD 2015 Radoslav Fulek (IST, Austria), Radoˇ s Radoiˇ ci´ c (CUNY)
Visibility clique
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 .
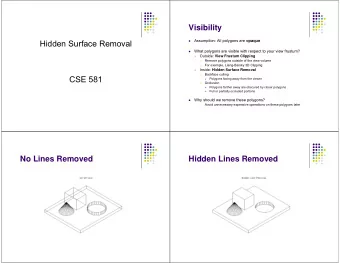
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 . A pair of polygons P 1 , P 2 ∈ S see each other if there exists a line segment ℓ orthogonal to both of them connecting them such that ℓ is disjoint from other polygons in S .
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 . A pair of polygons P 1 , P 2 ∈ S see each other if there exists a line segment ℓ orthogonal to both of them connecting them such that ℓ is disjoint from other polygons in S . P 2 P 1 P 3
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 . A pair of polygons P 1 , P 2 ∈ S see each other if there exists a line segment ℓ orthogonal to both of them connecting them such that ℓ is disjoint from other polygons in S . P 2 P 1 P 3 P 1 sees P 2 , but P 1 does not see P 3
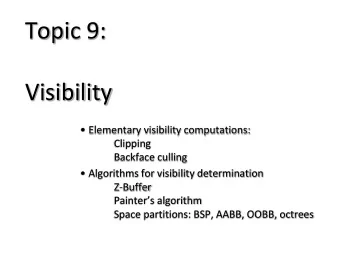
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 . A pair of polygons P 1 , P 2 ∈ S see each other if there exists a line segment ℓ orthogonal to both of them connecting them such that ℓ is disjoint from other polygons in S . The set S forms a visibility clique if every pair of polygons in S see each other.
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 . A pair of polygons P 1 , P 2 ∈ S see each other if there exists a line segment ℓ orthogonal to both of them connecting them such that ℓ is disjoint from other polygons in S . The set S forms a visibility clique if every pair of polygons in S see each other. P 1 P 2 P 3
Visibility clique We consider a finite set S of translates/homothetes of two dimensional convex polygons in R 3 . A pair of polygons P 1 , P 2 ∈ S see each other if there exists a line segment ℓ orthogonal to both of them connecting them such that ℓ is disjoint from other polygons in S . The set S forms a visibility clique if every pair of polygons in S see each other. P 1 P 2 { P 1 , P 2 , P 3 } forms a visibility clique. P 3
Bounding size of a visibility clique
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon.
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 .
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 . In fact, f (4) = 7 . Fekete et al. 1995
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 . In fact, f (4) = 7 . Fekete et al. 1995 Also, f (3) ≥ 14 . Babilon et al. 1999
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 . In fact, f (4) = 7 . Fekete et al. 1995 Also, f (3) ≥ 14 . Babilon et al. 1999 Not hard to see f ( k ) ≥ ⌊ k 2 ⌋ .
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 . In fact, f (4) = 7 . Fekete et al. 1995 Also, f (3) ≥ 14 . Babilon et al. 1999 Not hard to see f ( k ) ≥ ⌊ k 2 ⌋ .
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 . In fact, f (4) = 7 . Fekete et al. 1995 Also, f (3) ≥ 14 . Babilon et al. 1999 Not hard to see f ( k ) ≥ ⌊ k 2 ⌋ . f ( k ) ≤ 2 2 k Babilon et al. 1999
Bounding size of a visibility clique We are interested in the maximum size f ( k ) of the visibility clique for translates of a regular convex k -gon. Thus, f (4) ≥ 7 . In fact, f (4) = 7 . Fekete et al. 1995 Also, f (3) ≥ 14 . Babilon et al. 1999 Not hard to see f ( k ) ≥ ⌊ k 2 ⌋ . f ( k ) ≤ 2 2 k Babilon et al. 1999
f ( k ) ≤ 2 2 k Babilon et al. 1999
f ( k ) ≤ 2 2 k Babilon et al. 1999 P 1 P 2
f ( k ) ≤ 2 2 k Babilon et al. 1999 p 1 p 2 1 2 P 1 5 3 4 P 2
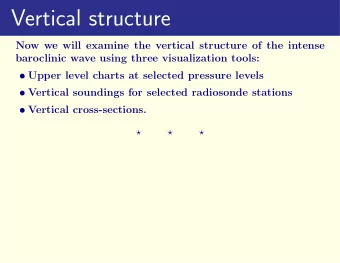
f ( k ) ≤ 2 2 k Babilon et al. 1999 p 1 Define partial orders < i for p 2 1 1 ≤ i ≤ k . We have P 1 < 1 P 2 . 2 P 1 5 3 4 P 2
f ( k ) ≤ 2 2 k Babilon et al. 1999 p 1 Define partial orders < i for p 2 1 1 1 ≤ i ≤ k . Now, P 1 and P 2 are 2 incomparable by < 1 . P 1 5 3 4 P 2
f ( k ) ≤ 2 2 k Babilon et al. 1999 p 1 Define partial orders < i for p 2 1 1 1 ≤ i ≤ k . Now, P 1 and P 2 are 2 incomparable by < 1 . P 1 5 3 By Dilworth theorem we can pick 4 P 2 a chain or anti-chain of size at � least f ( k ) .
f ( k ) ≤ 2 2 k Babilon et al. 1999 p 1 Define partial orders < i for p 2 1 1 1 ≤ i ≤ k . Now, P 1 and P 2 are 2 incomparable by < 1 . P 1 5 3 By Dilworth theorem we can pick 4 P 2 a chain or anti-chain of size at � least f ( k ) . We have k partial orders, and hence, �� � f ( k ) ≤ 2 . . . � �� � k − times
f ( k ) ≤ 2 2 k Babilon et al. 1999 p 1 Define partial orders < i for p 2 1 1 1 ≤ i ≤ k . Now, P 1 and P 2 are 2 incomparable by < 1 . P 1 5 3 By Dilworth theorem we can pick 4 P 2 a chain or anti-chain of size at � least f ( k ) . We have k partial orders, and hence, �� � f ( k ) ≤ 2 . . . � �� � P 3 k − times P 2 P 1 ( P 1 ∩ P 3 ) ⊂ P 2
Bounding size of a visibility clique
Bounding size of a visibility clique Theorem 1. (F and Radoiˇ ci´ c 15+) For homothetes of convex k -gon we have f ( k ) ≤ 2 2 ( k 2 ) +2 .
Bounding size of a visibility clique Theorem 1. (F and Radoiˇ ci´ c 15+) For homothetes of convex k -gon we have f ( k ) ≤ 2 2 ( k 2 ) +2 . First, we pick 1 4 fraction of homothetes such that no pair of them is contained one in another.
Bounding size of a visibility clique Theorem 1. (F and Radoiˇ ci´ c 15+) For homothetes of convex k -gon we have f ( k ) ≤ 2 2 ( k 2 ) +2 . First, we pick 1 4 fraction of homothetes such that no pair of them is contained one in another. Consider the poset ( P, ⊆ ) and observe that we have no chain of length five . P 3 P 1 P 2
Bounding size of a visibility clique Theorem 1. (F and Radoiˇ ci´ c 15+) For homothetes of convex k -gon we have f ( k ) ≤ 2 2 ( k 2 ) +2 . First, we pick 1 4 fraction of homothetes such that no pair of them is contained one in another. Consider the poset ( P, ⊆ ) and observe that we have no chain of length five . Use Dilworth theorem. P 3 P 1 P 2
Bounding size of a visibility clique Theorem 1. (F and Radoiˇ ci´ c 15+) For homothetes of convex k -gon we have f ( k ) ≤ 2 2 ( k 2 ) +2 . • We order homothetes from left to right according to x -coordinates of centers of gravity. • We color each edge in the visibility clique with a pair consisting of a two element set encoding the vertices supporting the common tangents, and an indicator for � k � its above–below relationship. We use 2 colors. 2 P 1 1 1 2 c ( P 1 P 2 ) = ( { 1 , 4 } , 0) 4 3 4 P 2
Bounding size of a visibility clique Theorem 1. (F and Radoiˇ ci´ c 15+) For homothetes of convex k -gon we have f ( k ) ≤ 2 2 ( k 2 ) +2 . • We order homothetes from left to right according to x -coordinates of centers of gravity. • We color each edge in the visibility clique with a pair consisting of a two element set encoding the vertices supporting the common tangents, and an indicator for � k � its above–below relationship. We use 2 colors. 2 • We apply a Ramsey–type theorem for ordered graphs.
Recommend
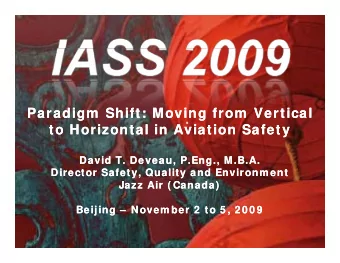
![The Touring Polygons Problem (TPP) [Dror-Efrat-Lubiw-M]: Given a sequence of k polygons in the](https://c.sambuz.com/895801/the-touring-polygons-problem-tpp-s.webp)




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.