The Reinforcement Learning Problem Robert Platt Northeastern - PowerPoint PPT Presentation
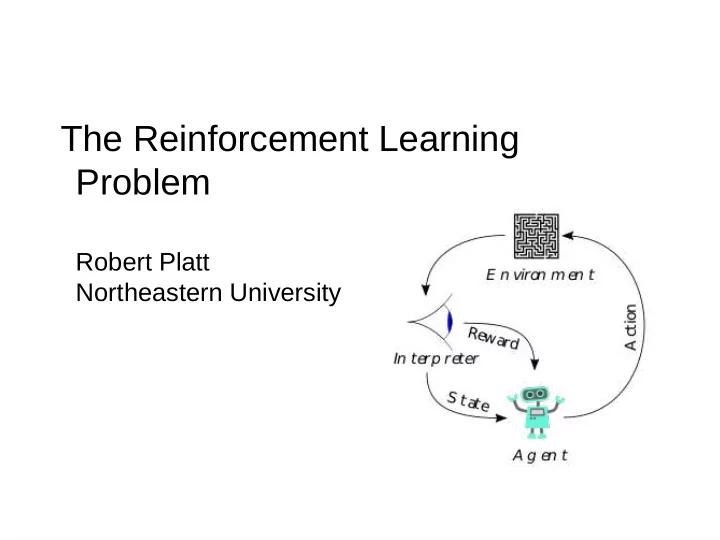
The Reinforcement Learning Problem Robert Platt Northeastern University Agent Action Agent World Observation Reward On a single time step, agent does the following: 1. observe some information 2. select an action to execute 3. take note
The Reinforcement Learning Problem Robert Platt Northeastern University
Agent Action Agent World Observation Reward On a single time step, agent does the following: 1. observe some information 2. select an action to execute 3. take note of any reward Goal of agent: select actions that maximize sum of expected future rewards.
Example: rat in a maze Move left/right/up/down Agent World Observe position in maze Reward = +1 if get cheese
Example: robot makes coffee Move robot joints Agent World Observe camera image Reward = +1 if coffee in cup
Example: agent plays pong Joystick command Agent World Observe screen pixels Reward = game score
Reinforcement Learning Action Agent World Observation Reward Goal of agent: select actions that maximize sum of expected future rewards. – agent computes a rule for selecting actions to execute
Reinforcement Learning Joystick command Agent World Observe screen pixels Reward = game score Goal of agent: select actions that maximize sum of expected future rewards. – agent computes a rule for selecting actions to execute
Model Free Reinforcement Learning Joystick command Agent World Observe screen pixels Reward = game score Agent learns a strategy for selecting actions based on experience – no prior model of system dynamics, i.e. no prior knowledge of “how the world works” – no prior model of reward, i.e. no prior knowledge of what actions lead to reward
Distinction Relative to Planning Joystick command Agent World Observe screen pixels Reward = game score Agent learns a strategy for selecting actions based on prior model – agent is given a model of system dynamics in advance – agent is “told” which states/actions are rewarding or not
RL vs Planning When to use RL: When to use planning: – hard to model systems – when the system is easily modeled – stochastic systems – when the system is deteriminstic
RL vs Planning When to use RL: When to use planning: – hard to model systems – when the system is easily modeled – stochastic systems – when the system is deteriminstic Ultimately, RL and planning are closely related...
Recommend















![Advanced Analytics in Business [D0S07a] Big Data Platforms & Technologies [D0S06a]](https://c.sambuz.com/814303/advanced-analytics-in-business-d0s07a-big-data-platforms-s.webp)


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.