
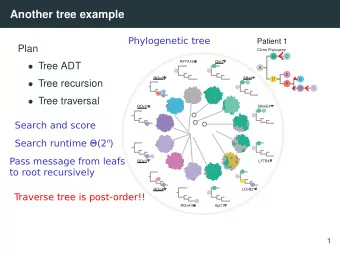
The R -tree: An Efficient and Robust Access Method for Points and - PowerPoint PPT Presentation
The R -tree: An Efficient and Robust Access Method for Points and Rectangles N. Beckmann H. P. Kriegel R. Schneider B. Seeger Praktische Informatik, Universitaet Bremen February 23, 2013 Presented by Zhitao Gong Beckmann et al.
The R ∗ -tree: An Efficient and Robust Access Method for Points and Rectangles N. Beckmann H. P. Kriegel R. Schneider B. Seeger Praktische Informatik, Universitaet Bremen February 23, 2013 Presented by Zhitao Gong Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 1 / 19
Outline Introduction 1 Reasonale for R ∗ -tree 2 Principles of R-tree Possible Optimizations Criteria Problem and solution Detailed Optimization 3 Performance Comparison 4 Intuitive Example of Optimization Dataset Experiment Results conclusion 5 Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 2 / 19
Reasonale for R ∗ -tree Principles of R-tree Principles of R-tree I General contraints Non-leaf node ( cp , Rectangle ) Leaf node ( O id , Rectangle ) Capacity number of rectangles contained in one node 2 ≤ N ≤ M for root and m ≤ N ≤ M for non-root where 2 ≤ m ≤ M / 2 Height all leaves on the same level Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 3 / 19
Reasonale for R ∗ -tree Principles of R-tree Principles of R-tree II Dynamic Features Insertions and deletions mixed with queries No periodic global re-organization Different sequences of insertion build up different trees Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 4 / 19
Reasonale for R ∗ -tree Principles of R-tree R-tree Example R1 R4 R11 R3 R9 R5 R13 R10 R14 R8 R12 R2 R7 R18 R17 R6 R16 R19 R15 R1 R2 R3 R4 R5 R6 R7 R8 R9 R10 R13 R14 R15 R16 R17 R18 R19 R11 R12 Figure : R-tree example Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 5 / 19
Reasonale for R ∗ -tree Possible Optimizations Criteria Optimizations Criteria I 1 Minimizing dead space R1 R4 R11 R3 R9 R5 R13 R10 R14 R8 R12 Figure : Dead Space for R1 Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 6 / 19
Reasonale for R ∗ -tree Possible Optimizations Criteria Optimizations Criteria II 2 Minimizing overlap R1 R2 Figure : Overlap between R1 and R2 Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 7 / 19
Reasonale for R ∗ -tree Possible Optimizations Criteria Optimizations Criteria III 3 Minimizing margin 4 Optimize storage utilization Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 8 / 19
Reasonale for R ∗ -tree Problem and solution Problem and solution I Senario Goal Efficient retrieval Criteria 4 possible optimizations Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 9 / 19
Reasonale for R ∗ -tree Problem and solution Problem and solution II Problem The known parameters of good retrieval performance affect each other in a very complex way. What we want: deadspace ↓ , overlap ↓ , margin ↓ , storage utilization ↑ ⇒ performance ↑ deadspace ↓ and overlap ↓ ⇒ storage utilization ↓ deadspace ↓ or overlap ↓ ⇒ margin ↑ Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 10 / 19
Reasonale for R ∗ -tree Problem and solution Problem and solution III Solution Use an enginneering approach to find the best possible combination Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 11 / 19
Detailed Optimization InsertData Algorithm Figure : InsertData Algorithm Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 12 / 19
Detailed Optimization Optimization of ChooseSubtree R-tree least area enlargement smallest area Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 13 / 19
Detailed Optimization Optimization of ChooseSubtree R-tree least area enlargement smallest area R ∗ -tree N points to leaves, determine the minimum overlap cost least overlap enlargement least area enlargement smallest area Otherwise, determine the minimum area cost area enlargement smallest area Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 13 / 19
Performance Comparison Intuitive Example of Optimization Intuitive Example of Optimization Figure : Overfilled Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 14 / 19
Performance Comparison Intuitive Example of Optimization Intuitive Example of Optimization Figure : Overfilled Figure : Quad-R-tree Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 14 / 19
Performance Comparison Intuitive Example of Optimization Intuitive Example of Optimization Figure : Overfilled Figure : Quad-R-tree Figure : R ∗ -tree Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 14 / 19
Performance Comparison Dataset Data file and Query file Data file Uniform Cluster Parcel Real-data Gaussian Mixed-Uniform Query file rectangle intersection query point query rectangle encosure query Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 15 / 19
Performance Comparison Experiment Results Results for Uniform I Disk Accesses Uniform Dataset 300 lin_gut quad_gut 250 greene R ∗ -tree 200 disk accesses 150 100 50 0 point inter 0.001 inter 0.01 inter 0.1 inter 1 encl 0.001 encl 0.001 Figure : Normalized disk accesses data Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 16 / 19
Performance Comparison Experiment Results Results for Uniform II Storage Utilization Uniform Dataset 80 70 60 storage utilization 50 40 30 20 10 0 R ∗ -tree greene lin_gut quad_gut Figure : Storage Utilization comparison Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 17 / 19
Performance Comparison Experiment Results Results for Uniform III Disk Accesses Per insertion Uniform Dataset 8 7 6 storage utilization 5 4 3 2 1 0 R ∗ -tree greene lin_gut quad_gut Figure : Disk accesses per insertion Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 18 / 19
conclusion Conclusion Efficient SAM and PAM Outstanding performance Generalizing to polygons Beckmann et al. (Universitaet Bremen) R ∗ -tree February 23, 2013 19 / 19
Recommend




![Final Examples Announcements Trees Tree-Structured Data def tree(label, branches=[]): A tree](https://c.sambuz.com/1034949/final-examples-announcements-trees-tree-structured-data-s.webp)







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.