The GOLEM Project Automatic Fabrication Results Marcin Pilat - PDF document
Contents Evolutionary Robotics Project Introduction Evolutionary Design Simulator The GOLEM Project Automatic Fabrication Results Marcin Pilat Further Research Conclusions Evolutionary Robotics GOLEM Project
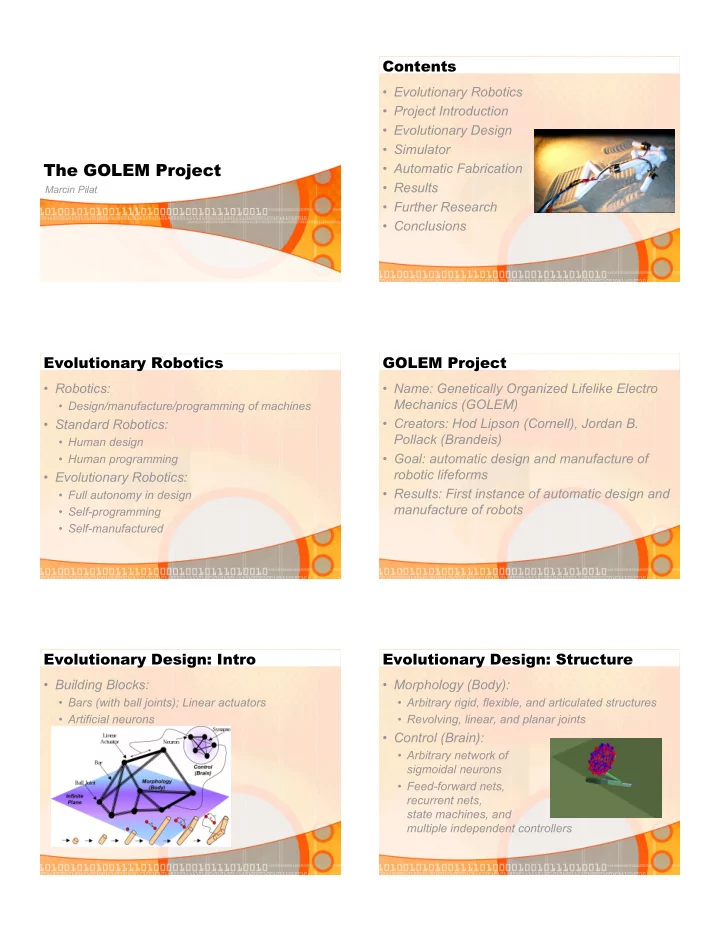
Contents • Evolutionary Robotics • Project Introduction • Evolutionary Design • Simulator The GOLEM Project • Automatic Fabrication • Results Marcin Pilat • Further Research • Conclusions Evolutionary Robotics GOLEM Project • Robotics: • Name: Genetically Organized Lifelike Electro Mechanics (GOLEM) • Design/manufacture/programming of machines • Creators: Hod Lipson (Cornell), Jordan B. • Standard Robotics: Pollack (Brandeis) • Human design • Goal: automatic design and manufacture of • Human programming robotic lifeforms • Evolutionary Robotics: • Results: First instance of automatic design and • Full autonomy in design manufacture of robots • Self-programming • Self-manufactured Evolutionary Design: Intro Evolutionary Design: Structure • Building Blocks: • Morphology (Body): • Bars (with ball joints); Linear actuators • Arbitrary rigid, flexible, and articulated structures • Artificial neurons • Revolving, linear, and planar joints • Control (Brain): • Arbitrary network of sigmoidal neurons • Feed-forward nets, recurrent nets, state machines, and multiple independent controllers
Evolutionary Design: Evolution Evolutionary Design: Mutations • Based on ES and EP • Mutation types (probabilities): • Generations: 300-600 • removal/addition of bar (0.01) • removal/addition of unconnected neuron (0.01) • Population: 200 individuals (steady-state) • change in length of bar (0.1) • Initially null individuals (no bars/actuators/neurons) • change in neuron synaptic weight (0.1) • Selection: Fitness-proportionate • split vertex with separating bar (0.03) • Replacement: random • split bar by a vertex (0.03) • Genetic Operators: mutations • attach/detach neuron to bar (0.03) • Fitness: net Euclidean distance moved over • At least one mutation applied 12 cycles of neural control Simulator Automatic Fabrication: Printing • Mechanics and neural control simulated • Rapid-prototyping technology (“3D Printing”) concurrently • Point model converted to solid model • Mechanics: • Built with layered thermoplastic material: • Complex joints: • quasi-static motion (each frame statically stable) • relaxation (minimize energy term) • static friction and noise • Neural Net: • Discrete cycles • Actuator length in increments � 1cm • Can be melted and recycled Automatic Fabrication: Assembly Results: Overview • Evolved neural controller • Different and elaborate solutions evolved downloaded into • Typically around 20 building blocks PIC microcontroller: • Some developed symmetry • Linear actuators connected • Typically 10s of generations passed before in proper places initial movement • Robot is ready to be used: • Typical evolution:
Results: Evolutionary Patterns Results: Population • Snake extreme extreme family: divergence convergence intermediate massive divergence extinction Results: Fitness Results: Robot Examples 1 • Plots of individual fitness over generations: • Arrow: • 1) progress in noticeable jumps • 2) progress rate slows down as fitness improves Results: Robot Examples 2 Results: Robot Examples 3 • Tetra: • Ratchet:
Results: Robot Examples 4 Results: Robot Examples 5 • Snake: • Crab: • Biped: • Balance: Results: Robot Examples 6 Further Research • Complex1: • Study very large populations with more CPU power [Golem@home] • Inclusion of more sophisticated training environment, sensors, robot interactions • Discover and reuse modules • How can more complex modular structures self-organize? • Complex2: Conclusions GOLEM • Demonstrated: • Thank You • automatic manufacturing of automatically designed electromechanical systems • with minimum human interaction • All images and videos from GOLEM website at: http://demo.cs.brandeis.edu/golem/
Recommend



![Majority is incompressible by AC 0 [ p ] circuits Igor Carboni Oliveira Columbia University](https://c.sambuz.com/1071601/majority-is-incompressible-by-ac-0-p-circuits-s.webp)


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.