The Gaussian Distribution Continuous distributions Probability - PowerPoint PPT Presentation
The Gaussian Distribution Continuous distributions Probability density function (pdf) for a continuous random variable X Chris Williams, School of Informatics, University of Edinburgh b P ( a X b ) = p ( x ) dx Overview a
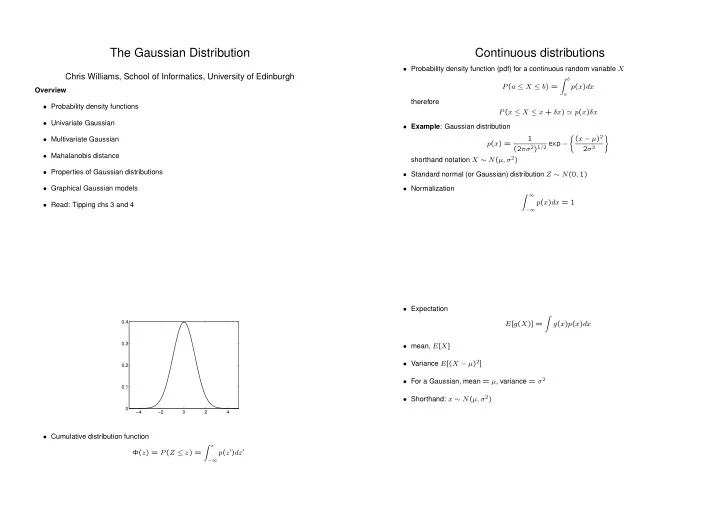
The Gaussian Distribution Continuous distributions • Probability density function (pdf) for a continuous random variable X Chris Williams, School of Informatics, University of Edinburgh � b P ( a ≤ X ≤ b ) = p ( x ) dx Overview a therefore • Probability density functions P ( x ≤ X ≤ x + δx ) ≃ p ( x ) δx • Univariate Gaussian • Example : Gaussian distribution � ( x − µ ) 2 � 1 • Multivariate Gaussian p ( x ) = (2 πσ 2 ) 1 / 2 exp − 2 σ 2 • Mahalanobis distance shorthand notation X ∼ N ( µ, σ 2 ) • Properties of Gaussian distributions • Standard normal (or Gaussian) distribution Z ∼ N (0 , 1) • Graphical Gaussian models • Normalization � ∞ p ( x ) dx = 1 • Read: Tipping chs 3 and 4 −∞ • Expectation � 0.4 E [ g ( X )] = g ( x ) p ( x ) dx 0.3 • mean, E [ X ] • Variance E [( X − µ ) 2 ] 0.2 • For a Gaussian, mean = µ , variance = σ 2 0.1 • Shorthand: x ∼ N ( µ, σ 2 ) 0 −4 −2 0 2 4 • Cumulative distribution function � z p ( z ′ ) dz ′ Φ( z ) = P ( Z ≤ z ) = −∞
Bivariate Gaussian I • Let X 1 ∼ N ( µ 1 , σ 2 1 ) and X 2 ∼ N ( µ 2 , σ 2 2 ) 1 0.8 • If X 1 and X 2 are independent 0.6 0.4 � ( x 1 − µ 1 ) 2 + ( x 2 − µ 2 ) 2 � 1 2 ) 1 / 2 exp − 1 p ( x 1 , x 2 ) = 0.2 2 π ( σ 2 1 σ 2 σ 2 σ 2 2 1 2 0 2 1 2 1 0 0 −1 −1 � � � � � σ 2 � −2 x 1 µ 1 0 −2 • Let x = , µ = , Σ = 1 σ 2 x 2 µ 2 0 2 2 π | Σ | 1 / 2 exp − 1 1 � ( x − µ ) T Σ − 1 ( x − µ ) � p ( x ) = 2 Bivariate Gaussian II Multivariate Gaussian • Covariance • P ( x ∈ R ) = � R p ( x ) d x • Σ is the covariance matrix Σ = E [( x − µ )( x − µ ) T ] • Multivariate Gaussian Σ ij = E [( x i − µ i )( x j − µ j )] � � 1 − 1 2( x − µ ) T Σ − 1 ( x − µ ) p ( x ) = (2 π ) d/ 2 | Σ | 1 / 2 exp • Example: plot of weight vs height for a population • Σ is the covariance matrix Σ = E [( x − µ )( x − µ ) T ] Σ ij = E [( x i − µ i )( x j − µ j )]
Mahalanobis Distance • Σ is symmetric d 2 Σ ( x i , x j ) = ( x i − x j ) T Σ − 1 ( x i − x j ) • Shorthand x ∼ N ( µ , Σ) • d 2 Σ ( x i , x j ) is called the Mahalanobis distance between x i and x j • If Σ is diagonal, the contours of d 2 Σ are axis-aligned ellipsoids • For p ( x ) to be a density, Σ must be positive definite • If Σ is not diagonal, the contours of d 2 Σ are rotated ellipsoids Σ = U Λ U T • Σ has d ( d + 1) / 2 parameters, the mean has a further d where Λ is diagonal and U is a rotation matrix • Σ is positive definite ⇒ entries in Λ are positive Parameterization of the covariance matrix Transformations of Gaussian variables • Linear transformations of Gaussian RVs are Gaussian • Fully general Σ = ⇒ variables are correlated X ∼ N ( µ x , Σ) Y = A X + b • Spherical or isotropic. Σ = σ 2 I . Variables are independent Y ∼ N ( A µ x + b , A Σ A T ) • Sums of Gaussian RVs are Gaussian • Diagonal [Σ] ij = δ ij σ 2 i Variables are independent Z = X + Y E [ Z ] = E [ X ] + E [ Y ] • Rank-constrained: Σ = WW T + Ψ , with W being a d × q matrix with var[ Z ] = var[ X ] + var[ Y ] + 2covar[ XY ] q < d − 1 and Ψ diagonal. This is the factor analysis model. If Ψ = σ 2 I , if X and Y are independent var[ Z ] = var[ X ] + var[ Y ] then with have the probabilistic principal components analysis (PPCA) model
Properties of the Gaussian distribution Graphical Gaussian Models • Gaussian has relatively simple analytical properties Example: • Central limit theorem. Sum (or mean) of M independent random variables is distributed normally as M → ∞ (subject to a few general conditions) x • Diagonalization of covariance matrix = ⇒ rotated variables are independent • All marginal and conditional densities of a Gaussian are Gaussian • The Gaussian is the distribution that maximizes the entropy H = − � p ( x ) log p ( x ) d x y z for fixed mean and covariance • Let X denote pulse rate • Let Y denote measurement taken by machine 1, and Z denote measurement taken by machine 2 As before • Model X ∼ N ( µ x , v x ) P ( x, y, z ) = P ( x ) P ( y | x ) P ( z | x ) Y = µ y + w y ( X − µ x ) + N y Z = µ z + w z ( X − µ x ) + N z Show that noise N y ∼ N (0 , v N y ) , N z ∼ N (0 , v N z ) , independent • ( X, Y, Z ) is jointly Gaussian; can do inference for X given Y = y and Z = z µ x µ = µ y µ z v x w y v x w z v x w 2 y v x + v N w y v x w y w z v x Σ = y w 2 z v x + v N w z v x w y w z v x z
Inference in Gaussian models Hybrid (discrete + continuous) networks • Partition variables into two groups, X 1 and X 2 � � • Could discretize continuous variables, but this is ugly, and gives large µ 1 µ = µ 2 CPTs � � Σ 11 Σ 12 Σ = Σ 21 Σ 22 • Better to use parametric families, e.g. Gaussian µ c 1 | 2 = µ 1 + Σ 12 Σ − 1 22 ( x 2 − µ 2 ) Σ c 1 | 2 = Σ 11 − Σ 12 Σ − 1 • Works easily when continuous nodes are children of discrete nodes; we 22 Σ 21 then obtain a conditional Gaussian model • For proof see § 13.4 of Jordan (not examinable) • Formation of joint Gaussian is analogous to formation of joint probability table for discrete RVs. Propagation schemes are also possible for Gaussian RVs
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.