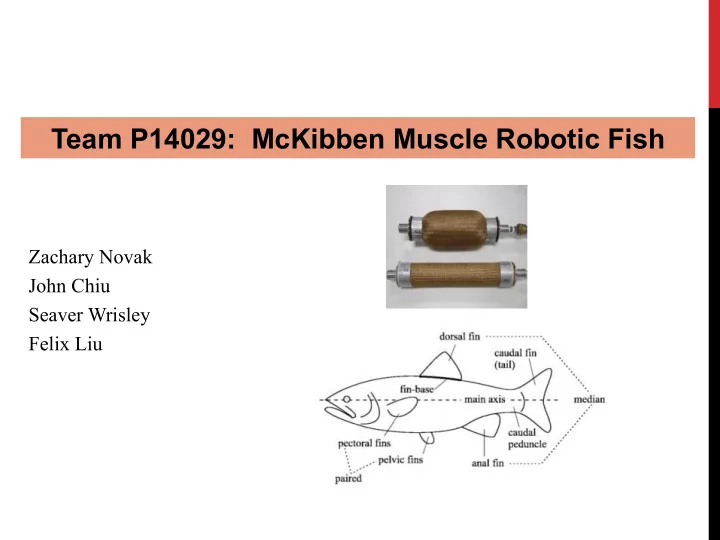
Team P14029: McKibben Muscle Robotic Fish Zachary Novak John Chiu Seaver Wrisley Felix Liu
AGENDA • Project Background • Concept Development • Problem Statement • Alternatives Considered • Market Evaluation • Pugh Analysis • Customer Requirements • Selected Concept • Engineering/Benchmarking • System Architecture Specifications • House of Quality • Project Planning • System Analysis • Engineering Analysis Needed • Functional Decomposition • Risk Assessment • Morphological Analysis • Test Plan Outline • Scheduling
PROJECT BACKGROUND
PROBLEM STATEMENT This project is designed to prove the feasibility of McKibben muscles for use in underwater robotic applications, and to develop core technology and a platform for other teams to use in the future. The project specifically seeks to develop a soft-bodied pneumatic fish that looks, moves, and feels like a fish. The robotic fish should be capable of swimming forward, backward, and turning, most likely using Body Caudal Fin propulsion, and the primary mechanism for generating the swimming motion must be McKibben muscles.
DELIVERABLES • A functional prototype which meets all customer requirements, and that may be used as a platform to be expanded upon by future MSD teams • Detailed documentation covering project design, testing, and fabrication • Appropriate test data ensuring all customer needs are met • Detailed user manuals for operation and troubleshooting • Suggestions for future expansion
MARKET NICHE • Government • NOAA (National Oceanic and Atmospheric Administration) • Total 2014 Budget: 5.4 Billion • Survey and Monitoring Projects: 24.8 Million • Ocean Exploration and Research: 29.1 Million • Private Fields • Offshore Drilling Market • Projected 2018 Value: 121 Billion • Predicted to spend 640 Billion this year just to find oil • Case Study: Oceaneering International Inc. (OII) • 90% of 1.97 Billion revenue from oil & natural gas sector • Remotely Operated Vehicles (ROV) account for 630 Million • Underwater tasks: drill support, installation/construction support, pipeline inspection, surveys and subsea production facility operation and maintenance
CUSTOMER REQUIREMENTS
CONSTRAINTS
ENGINEERING REQUIREMENTS
ENGINEERING REQUIREMENTS
SYSTEM ANALYSIS
FUNCTIONAL DECOMPOSITION
MORPHOLOGICAL ANALYSIS (1 OF 2) Fish ¡Type Harp ¡Type Manta ¡Ray Eel Locomotion ¡ Type Body ¡Caudal ¡Fin ¡Motion ¡(Oscillation) Median ¡Paired ¡Fin ¡Motion Body ¡Caudal ¡Fin ¡Motion ¡(Undulation) Locomotion ¡ Mechanism McKibben ¡Muscle ¡w/ ¡Pulleys McKibben ¡Muscle ¡w/ ¡Linages McKibben ¡Muscle ¡w/ ¡Flexible ¡Membrane Soft ¡Robotic ¡Air ¡Muscle Turning ¡ Mechanism Body ¡as ¡Rudder Independed ¡Paired ¡Fin ¡Control Bias ¡Weight ¡and ¡Carve Side-‑Mount ¡Thrusters ¡(Water, ¡Air, ¡Prop, ¡etc.) Actuation ¡ Source Syringe ¡Pump DC ¡Pump DC ¡Motor Actuation ¡ Method Servos Cams Rack ¡and ¡Pinion Solenoid ¡Valve ¡Block
MORPHOLOGICAL ANALYSIS (2 OF 2) Communication Wireless ¡Option ¡w/ ¡Buoy Wireless ¡Option ¡ Tethered ¡Option ¡w/ ¡Spooled ¡Cable Process ¡ Commands Arduino ¡Self ¡Controlled Labview ¡w/ ¡User ¡Interface Onboard ¡Minions Transmit ¡ Commands Remote ¡Controlled Radiowaves Telepathic Bluetooth Sonar/Voice ¡Commands Actuation ¡Fluids Water Air CO2 Power ¡Source Battery Wall ¡Plug Solar Wind Chemical ¡Reaction ¡Membrane ¡/ ¡ Skin ¡Materials ¡ and ¡Methods Paper ¡Mache Plastic ¡Soft ¡Polymer ¡Skin ¡ Fiberglass Stamped ¡Texture ¡(Scales ¡etc.) Painted ¡Features Screenprinted Body ¡Structure Mesh ¡Cage Molded ¡Plastic ¡ Formed ¡Metal Cast ¡Iron Fiberglass Universal ¡Joints Cables
CONCEPT DEVELOPMENT
BEST CURRENT BIOMIMETIC FISH Due to the innovative nature of this project, there isn’t anything currently on the market to directly compare to. However, University of Essex successfully constructed an excellent biomimetic fish utilizing servomotors in place of air-muscles.
OTHER EXISTING SOLUTIONS • Do we want to have this slide? • Manta Ray Design • Concerns about stability
ALTERNATIVES CONSIDERED • Body Styles • Pressurization Systems • Communication Interfaces
BODY STYLES
EEL Maybe we could just include a picture of this, have john construct an assembly quickly by combining joint sections into a large s-shape from existing model. Then say how this didn’t make it to the Pugh analysis because we decided that more joints would just increase the complexity of the design unnecessarily. Input?
MANTA RAY Brief Description Pros: McKibben muscles can be used quite easily Cons: Uncertainties around maintaining proper orientation.
SALMONOID
PROPULSION SYSTEMS
PADDLE WHEEL
SYRINGE PUMP
CENTRIFUGAL PUMP
COMMUNICATION INTERFACE Put any tethered versus untethered information here
COMBINATIONS CONSIDERED FURTHER • Manta Ray • Centrifugal Pump & Tethered • Salmonoid • Centrifugal Pump & Tethered • Syringe Pump & Untethered
PUGH ANALYSIS
SELECTED CONCEPT
SYSTEM ARCHITECTURE Robotic'Fish Control' Buoyancy' Frame Body Propulsion electronics modulation Bladder'or' Frame' Skin' Fluid'control' Software/' Actuation syringe' members materials (mechanical) programming bladder MicroE Fasteners Fins McKibben' controller/' Pump(s) muscles computer Attachment' Joints Mounting'to' Tether? to'frame Motors? frame Mounting'to' Solenoid' Sensors? body/fins block? Fluid' pressure' delivery Electricity
ENGINEERING ANALYSIS FLOWCHART (SALMON WITH SOLENOIDS/PUMP) Type&of&fish Fish& Size&of&fish motion ������������������ Tail& actuation& Speed angles Fluids � p=F* � t calcs Force&required&to& Pressure& ���������������� drag?&(likely& ����������� negligible) Forces&needed& on&fins/body Torque&required& about&fin&pivot& point&from&muscles Lever&arm& Force& Relaxed& Actuation& of&muscles& required&from& length&of& length&of& about&fin& McKibben& muscle muscle hinge&point muscles Total& McKibben& Pressure&of& Input& volume& muscle& fluid variable diameter change #&of& McKibben& muscles Solenoid& Calculated& block&sizing parameter Volumetric& flow&rate Component& Pump&sizing sizing& parameter MicroO #&of&other& Electricity& controller& sensors required& sizing (battery?)
ENGINEERING ANALYSIS FLOWCHART (SALMON WITH SYRINGE PUMPS) Type&of&fish Fish& Size&of&fish motion ������������������ Tail& actuation& Speed angles Fluids � p=F* � t calcs Force&required&to& Pressure& ���������������� drag?&(likely& ����������� negligible) Forces&needed& on&fins/body Torque&required& about&fin&pivot& point&from&muscles Input& Lever&arm& variable Force& Relaxed& Actuation& of&muscles& required&from& length&of& length&of&
RISK ASSESSMENT SCALE
RISK ASSESSMENT
RISK ASSESSMENT
TEST PLAN OUTLINE John Chiu
SCHEDULE Will do after consulting with Felix about way to do it without using MS Project tomorrow
BACKUP SLIDES FOR ANTICIPATED QUESTIONS Come together as a group to discuss what questions might be asked. - Feasibility (how do you know if muscles can produce enough force) need to get some general idea how to convince audience it will work - What type of skin, should probably at least do some research on this and see what options are available? (maybe construct a mold and injection mold a hollow 2- piece shell? Then what to do for painting? Maybe just make mold out of blue/green plastic and that will be enough? - … ..
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries