Synchronizing Finite Automata Lecture I: Cern y conjecture, - PowerPoint PPT Presentation
Synchronizing Finite Automata Lecture I: Cern y conjecture, Pin-Frankls bound and recent advances Mikhail Volkov Ural Federal University Mikhail Volkov Synchronizing Finite Automata 1. Definitions Deterministic finite automata
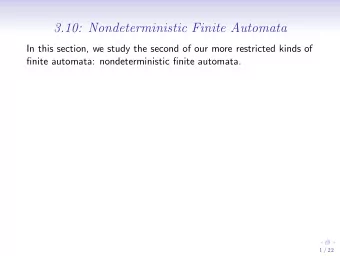
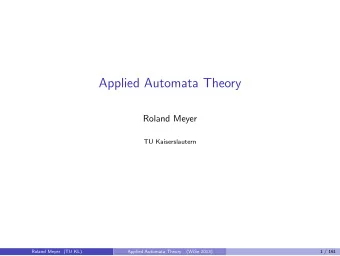
6. Example a a a , b b b a 0 1 01 01 12 12 02 02 13 13 a a b b b b b b a 3 2 03 03 23 23 b a a a a , Q . a = { 1 , 2 , 3 } ; a · bba , Q . abba = { 1 , 3 } abba · babbba , Q . abbababbba = { 1 } Observe that the reset word constructed this way is of length 10 while we know a reset word of length 9. Mikhail Volkov Synchronizing Finite Automata
6. Example a a a , b b b a 0 1 01 01 12 12 02 02 13 13 a a a b b b b b b b b a 3 2 03 03 23 23 b a a a a , Q . a = { 1 , 2 , 3 } ; a · bba , Q . abba = { 1 , 3 } abba · babbba , Q . abbababbba = { 1 } Observe that the reset word constructed this way is of length 10 while we know a reset word of length 9. Mikhail Volkov Synchronizing Finite Automata
6. Example a a a , b b b a 0 1 01 01 12 12 02 02 13 13 a a b b b b b b a 3 2 03 03 23 23 b a a a a , Q . a = { 1 , 2 , 3 } ; a · bba , Q . abba = { 1 , 3 } abba · babbba , Q . abbababbba = { 1 } Observe that the reset word constructed this way is of length 10 while we know a reset word of length 9. Mikhail Volkov Synchronizing Finite Automata
6. Example a a a , b b b a 0 1 01 01 12 12 02 02 13 13 a a a a b b b b b b b b b b a 3 2 03 03 23 23 b a a a a , Q . a = { 1 , 2 , 3 } ; a · bba , Q . abba = { 1 , 3 } abba · babbba , Q . abbababbba = { 1 } Observe that the reset word constructed this way is of length 10 while we know a reset word of length 9. Mikhail Volkov Synchronizing Finite Automata
6. Example a a a , b b b a 0 1 01 12 02 13 a a b b b b b b a 3 2 03 23 b a a a a , Q . a = { 1 , 2 , 3 } ; a · bba , Q . abba = { 1 , 3 } abba · babbba , Q . abbababbba = { 1 } Observe that the reset word constructed this way is of length 10 while we know a reset word of length 9. Mikhail Volkov Synchronizing Finite Automata
7. Results-I Thus, recognizing synchronizability reduces to a reachability problem in the automaton whose states are the 2-subsets and the 1-subsets of Q . The latter can be solved by BFS in O ( n 2 · | Σ | ) time where n = | Q | . Can one do better? It is an open problem. Recently, Mikhail Berlinkov has developed a (very non-trivial) algorithm that checks whether or not an automaton with n states is synchronizing and spends time O ( n ) on average. The worst case complexity of Berlinkov’s algorithm is still quadratic. Berlinkov’s algorithm has been implemented by Pavel Ageev. Mikhail Volkov Synchronizing Finite Automata
7. Results-I Thus, recognizing synchronizability reduces to a reachability problem in the automaton whose states are the 2-subsets and the 1-subsets of Q . The latter can be solved by BFS in O ( n 2 · | Σ | ) time where n = | Q | . Can one do better? It is an open problem. Recently, Mikhail Berlinkov has developed a (very non-trivial) algorithm that checks whether or not an automaton with n states is synchronizing and spends time O ( n ) on average. The worst case complexity of Berlinkov’s algorithm is still quadratic. Berlinkov’s algorithm has been implemented by Pavel Ageev. Mikhail Volkov Synchronizing Finite Automata
7. Results-I Thus, recognizing synchronizability reduces to a reachability problem in the automaton whose states are the 2-subsets and the 1-subsets of Q . The latter can be solved by BFS in O ( n 2 · | Σ | ) time where n = | Q | . Can one do better? It is an open problem. Recently, Mikhail Berlinkov has developed a (very non-trivial) algorithm that checks whether or not an automaton with n states is synchronizing and spends time O ( n ) on average. The worst case complexity of Berlinkov’s algorithm is still quadratic. Berlinkov’s algorithm has been implemented by Pavel Ageev. Mikhail Volkov Synchronizing Finite Automata
7. Results-I Thus, recognizing synchronizability reduces to a reachability problem in the automaton whose states are the 2-subsets and the 1-subsets of Q . The latter can be solved by BFS in O ( n 2 · | Σ | ) time where n = | Q | . Can one do better? It is an open problem. Recently, Mikhail Berlinkov has developed a (very non-trivial) algorithm that checks whether or not an automaton with n states is synchronizing and spends time O ( n ) on average. The worst case complexity of Berlinkov’s algorithm is still quadratic. Berlinkov’s algorithm has been implemented by Pavel Ageev. Mikhail Volkov Synchronizing Finite Automata
7. Results-I Thus, recognizing synchronizability reduces to a reachability problem in the automaton whose states are the 2-subsets and the 1-subsets of Q . The latter can be solved by BFS in O ( n 2 · | Σ | ) time where n = | Q | . Can one do better? It is an open problem. Recently, Mikhail Berlinkov has developed a (very non-trivial) algorithm that checks whether or not an automaton with n states is synchronizing and spends time O ( n ) on average. The worst case complexity of Berlinkov’s algorithm is still quadratic. Berlinkov’s algorithm has been implemented by Pavel Ageev. Mikhail Volkov Synchronizing Finite Automata
7. Results-I Thus, recognizing synchronizability reduces to a reachability problem in the automaton whose states are the 2-subsets and the 1-subsets of Q . The latter can be solved by BFS in O ( n 2 · | Σ | ) time where n = | Q | . Can one do better? It is an open problem. Recently, Mikhail Berlinkov has developed a (very non-trivial) algorithm that checks whether or not an automaton with n states is synchronizing and spends time O ( n ) on average. The worst case complexity of Berlinkov’s algorithm is still quadratic. Berlinkov’s algorithm has been implemented by Pavel Ageev. Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
8. Results-II In fact, the basic algorithm not only recognizes synchronizability but also returns a reset word provided that such exists. If one also wants to produce a reset word, one need O ( n 3 + n 2 · | Σ | ) time. Why? One needs time to write down the word! Clearly, the resulting reset word has length O ( n 3 ): the algorithm makes at most n − 1 steps and the length of the segment added in the step when k states are still to be compressed ( n ≥ k ≥ 2) is at � n � k � � most 1 + # of blank 2-subsets, i.e., 1 + − . This gives the 2 2 upper bound close to n 3 − n . 3 Can we do better? What is the exact bound? Mikhail Volkov Synchronizing Finite Automata
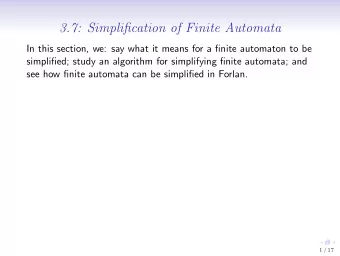
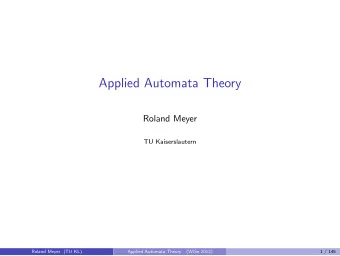
9. A Resource for Improvement a a a , b b b a 0 1 01 12 02 13 a a b b b b b b a 3 2 03 23 b a a a We see that the shortest path from a light-grey 2-subset to a singleton does not necessarily pass through all blank 2-subsets. Consider a generic step of the algorithm at which states to be compressed form a set P with | P | = k > 1 and let v = a 1 · · · a ℓ with a i ∈ Σ, i = 1 , . . . , ℓ , be a word of minimum length such that | P . v | < k . Mikhail Volkov Synchronizing Finite Automata
9. A Resource for Improvement a a a , b b b a 0 1 01 12 02 13 a a b b b b b b a 3 2 03 23 b a a a We see that the shortest path from a light-grey 2-subset to a singleton does not necessarily pass through all blank 2-subsets. Consider a generic step of the algorithm at which states to be compressed form a set P with | P | = k > 1 and let v = a 1 · · · a ℓ with a i ∈ Σ, i = 1 , . . . , ℓ , be a word of minimum length such that | P . v | < k . Mikhail Volkov Synchronizing Finite Automata
9. A Resource for Improvement a a a , b b b a 0 1 01 12 02 13 a a b b b b b b a 3 2 03 23 b a a a We see that the shortest path from a light-grey 2-subset to a singleton does not necessarily pass through all blank 2-subsets. Consider a generic step of the algorithm at which states to be compressed form a set P with | P | = k > 1 and let v = a 1 · · · a ℓ with a i ∈ Σ, i = 1 , . . . , ℓ , be a word of minimum length such that | P . v | < k . Mikhail Volkov Synchronizing Finite Automata
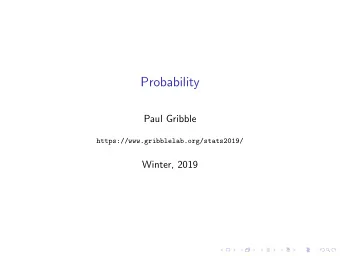
10. Studying Generic Step The sets P 1 = P , P 2 = P 1 . a 1 , . . . , P ℓ = P ℓ − 1 . a ℓ − 1 are k -subsets of Q . Since | P ℓ . a ℓ | < | P ℓ | , there exist two states q ℓ , q ′ ℓ ∈ P ℓ such that δ ( q ℓ , a ℓ ) = δ ( q ′ ℓ , a ℓ ). Now define 2-subsets R i = { q i , q ′ i } ⊆ P i , i = 1 , . . . , ℓ , such that δ ( q i , a i ) = q i +1 , δ ( q ′ i , a i ) = q ′ i +1 for i = 1 , . . . , ℓ − 1. a ℓ − 1 a 1 a 2 . . . q ′ q ′ q ′ a ℓ 1 2 ℓ a ℓ a ℓ − 1 a 1 a 2 . . . q 1 q 2 q ℓ P 1 P 2 P ℓ The condition that v is a word of minimum length with | P . v | < | P | implies R i � P j for 1 ≤ j < i ≤ ℓ . Mikhail Volkov Synchronizing Finite Automata
10. Studying Generic Step The sets P 1 = P , P 2 = P 1 . a 1 , . . . , P ℓ = P ℓ − 1 . a ℓ − 1 are k -subsets of Q . Since | P ℓ . a ℓ | < | P ℓ | , there exist two states q ℓ , q ′ ℓ ∈ P ℓ such that δ ( q ℓ , a ℓ ) = δ ( q ′ ℓ , a ℓ ). Now define 2-subsets R i = { q i , q ′ i } ⊆ P i , i = 1 , . . . , ℓ , such that δ ( q i , a i ) = q i +1 , δ ( q ′ i , a i ) = q ′ i +1 for i = 1 , . . . , ℓ − 1. a ℓ − 1 a 1 a 2 . . . q ′ q ′ q ′ a ℓ 1 2 ℓ a ℓ a ℓ − 1 a 1 a 2 . . . q 1 q 2 q ℓ P 1 P 2 P ℓ The condition that v is a word of minimum length with | P . v | < | P | implies R i � P j for 1 ≤ j < i ≤ ℓ . Mikhail Volkov Synchronizing Finite Automata
10. Studying Generic Step The sets P 1 = P , P 2 = P 1 . a 1 , . . . , P ℓ = P ℓ − 1 . a ℓ − 1 are k -subsets of Q . Since | P ℓ . a ℓ | < | P ℓ | , there exist two states q ℓ , q ′ ℓ ∈ P ℓ such that δ ( q ℓ , a ℓ ) = δ ( q ′ ℓ , a ℓ ). Now define 2-subsets R i = { q i , q ′ i } ⊆ P i , i = 1 , . . . , ℓ , such that δ ( q i , a i ) = q i +1 , δ ( q ′ i , a i ) = q ′ i +1 for i = 1 , . . . , ℓ − 1. a ℓ − 1 a 1 a 2 . . . q ′ q ′ q ′ a ℓ 1 2 ℓ a ℓ a ℓ − 1 a 1 a 2 . . . q 1 q 2 q ℓ P 1 P 2 P ℓ The condition that v is a word of minimum length with | P . v | < | P | implies R i � P j for 1 ≤ j < i ≤ ℓ . Mikhail Volkov Synchronizing Finite Automata
10. Studying Generic Step The sets P 1 = P , P 2 = P 1 . a 1 , . . . , P ℓ = P ℓ − 1 . a ℓ − 1 are k -subsets of Q . Since | P ℓ . a ℓ | < | P ℓ | , there exist two states q ℓ , q ′ ℓ ∈ P ℓ such that δ ( q ℓ , a ℓ ) = δ ( q ′ ℓ , a ℓ ). Now define 2-subsets R i = { q i , q ′ i } ⊆ P i , i = 1 , . . . , ℓ , such that δ ( q i , a i ) = q i +1 , δ ( q ′ i , a i ) = q ′ i +1 for i = 1 , . . . , ℓ − 1. a ℓ − 1 a 1 a 2 . . . q ′ q ′ q ′ a ℓ 1 2 ℓ a ℓ a ℓ − 1 a 1 a 2 . . . q 1 q 2 q ℓ P 1 P 2 P ℓ The condition that v is a word of minimum length with | P . v | < | P | implies R i � P j for 1 ≤ j < i ≤ ℓ . Mikhail Volkov Synchronizing Finite Automata
11. Combinatorial Configuration Our question reduces to the following problem in combinatorics of finite sets: Let Q be an n -set, P 1 , . . . , P ℓ a sequence of its k -subsets ( k > 1) such that each P i , 1 < i ≤ ℓ , includes a “fresh” 2-subset that does not occur in any previous P j (1 ≤ j < i ). How long can such renewing sequences be? � n − k +2 � A construction: fix a ( k − 2)-subset W of Q , list all 2 2-subsets of Q \ W and let T i be the union of W with the i th 2-subset in the list. This gives the renewing sequence T 1 , . . . , T s � n − k +2 � of length s = . Is this the maximum? 2 Mikhail Volkov Synchronizing Finite Automata
11. Combinatorial Configuration Our question reduces to the following problem in combinatorics of finite sets: Let Q be an n -set, P 1 , . . . , P ℓ a sequence of its k -subsets ( k > 1) such that each P i , 1 < i ≤ ℓ , includes a “fresh” 2-subset that does not occur in any previous P j (1 ≤ j < i ). How long can such renewing sequences be? � n − k +2 � A construction: fix a ( k − 2)-subset W of Q , list all 2 2-subsets of Q \ W and let T i be the union of W with the i th 2-subset in the list. This gives the renewing sequence T 1 , . . . , T s � n − k +2 � of length s = . Is this the maximum? 2 Mikhail Volkov Synchronizing Finite Automata
11. Combinatorial Configuration Our question reduces to the following problem in combinatorics of finite sets: Let Q be an n -set, P 1 , . . . , P ℓ a sequence of its k -subsets ( k > 1) such that each P i , 1 < i ≤ ℓ , includes a “fresh” 2-subset that does not occur in any previous P j (1 ≤ j < i ). How long can such renewing sequences be? � n − k +2 � A construction: fix a ( k − 2)-subset W of Q , list all 2 2-subsets of Q \ W and let T i be the union of W with the i th 2-subset in the list. This gives the renewing sequence T 1 , . . . , T s � n − k +2 � of length s = . Is this the maximum? 2 Mikhail Volkov Synchronizing Finite Automata
11. Combinatorial Configuration Our question reduces to the following problem in combinatorics of finite sets: Let Q be an n -set, P 1 , . . . , P ℓ a sequence of its k -subsets ( k > 1) such that each P i , 1 < i ≤ ℓ , includes a “fresh” 2-subset that does not occur in any previous P j (1 ≤ j < i ). How long can such renewing sequences be? � n − k +2 � A construction: fix a ( k − 2)-subset W of Q , list all 2 2-subsets of Q \ W and let T i be the union of W with the i th 2-subset in the list. This gives the renewing sequence T 1 , . . . , T s � n − k +2 � of length s = . Is this the maximum? 2 Mikhail Volkov Synchronizing Finite Automata
11. Combinatorial Configuration Our question reduces to the following problem in combinatorics of finite sets: Let Q be an n -set, P 1 , . . . , P ℓ a sequence of its k -subsets ( k > 1) such that each P i , 1 < i ≤ ℓ , includes a “fresh” 2-subset that does not occur in any previous P j (1 ≤ j < i ). How long can such renewing sequences be? � n − k +2 � A construction: fix a ( k − 2)-subset W of Q , list all 2 2-subsets of Q \ W and let T i be the union of W with the i th 2-subset in the list. This gives the renewing sequence T 1 , . . . , T s � n − k +2 � of length s = . Is this the maximum? 2 Mikhail Volkov Synchronizing Finite Automata
11. Combinatorial Configuration Our question reduces to the following problem in combinatorics of finite sets: Let Q be an n -set, P 1 , . . . , P ℓ a sequence of its k -subsets ( k > 1) such that each P i , 1 < i ≤ ℓ , includes a “fresh” 2-subset that does not occur in any previous P j (1 ≤ j < i ). How long can such renewing sequences be? � n − k +2 � A construction: fix a ( k − 2)-subset W of Q , list all 2 2-subsets of Q \ W and let T i be the union of W with the i th 2-subset in the list. This gives the renewing sequence T 1 , . . . , T s � n − k +2 � of length s = . Is this the maximum? 2 Mikhail Volkov Synchronizing Finite Automata
12. Combinatorial Configuration The question turned out to be very difficult and was solved (in the affirmative) by Peter Frankl (An extremal problem for two families of sets, Eur. J. Comb., 3 (1982) 125–127). The proof uses linearization techniques which are quite common in combinatorics of finite sets. One reformulates the problem in linear algebra terms and then uses the corresponding machinery. We identify Q with { 1 , 2 , . . . , n } and assign to each k -subset I = { i 1 , . . . , i k } the following polynomial D ( I ) in variables x i 1 , . . . , x i k over the field of reals. Mikhail Volkov Synchronizing Finite Automata
12. Combinatorial Configuration The question turned out to be very difficult and was solved (in the affirmative) by Peter Frankl (An extremal problem for two families of sets, Eur. J. Comb., 3 (1982) 125–127). The proof uses linearization techniques which are quite common in combinatorics of finite sets. One reformulates the problem in linear algebra terms and then uses the corresponding machinery. We identify Q with { 1 , 2 , . . . , n } and assign to each k -subset I = { i 1 , . . . , i k } the following polynomial D ( I ) in variables x i 1 , . . . , x i k over the field of reals. Mikhail Volkov Synchronizing Finite Automata
12. Combinatorial Configuration The question turned out to be very difficult and was solved (in the affirmative) by Peter Frankl (An extremal problem for two families of sets, Eur. J. Comb., 3 (1982) 125–127). The proof uses linearization techniques which are quite common in combinatorics of finite sets. One reformulates the problem in linear algebra terms and then uses the corresponding machinery. We identify Q with { 1 , 2 , . . . , n } and assign to each k -subset I = { i 1 , . . . , i k } the following polynomial D ( I ) in variables x i 1 , . . . , x i k over the field of reals. Mikhail Volkov Synchronizing Finite Automata
12. Combinatorial Configuration The question turned out to be very difficult and was solved (in the affirmative) by Peter Frankl (An extremal problem for two families of sets, Eur. J. Comb., 3 (1982) 125–127). The proof uses linearization techniques which are quite common in combinatorics of finite sets. One reformulates the problem in linear algebra terms and then uses the corresponding machinery. We identify Q with { 1 , 2 , . . . , n } and assign to each k -subset I = { i 1 , . . . , i k } the following polynomial D ( I ) in variables x i 1 , . . . , x i k over the field of reals. Mikhail Volkov Synchronizing Finite Automata
13. Linearization i 2 i k − 3 x 2 � 1 i 1 · · · x i 1 � 1 1 � i 1 � i k − 3 � i 2 x 2 � 1 i 2 · · · x i 2 � � 2 2 i 2 I = { i 1 , . . . , i k } �→ D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � � i 2 i k − 3 x 2 1 i k · · · x i k � � k k i k k × k Then one proves that: • the polynomials D ( P 1 ) , . . . , D ( P ℓ ) are linearly independent whenever the k -subsets P 1 , . . . , P ℓ form a renewing sequence; • the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Mikhail Volkov Synchronizing Finite Automata
13. Linearization i 2 i k − 3 x 2 � 1 i 1 · · · x i 1 � 1 1 � i 1 � i k − 3 � i 2 x 2 � 1 i 2 · · · x i 2 � � 2 2 i 2 I = { i 1 , . . . , i k } �→ D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � � i 2 i k − 3 x 2 1 i k · · · x i k � � k k i k k × k Then one proves that: • the polynomials D ( P 1 ) , . . . , D ( P ℓ ) are linearly independent whenever the k -subsets P 1 , . . . , P ℓ form a renewing sequence; • the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Mikhail Volkov Synchronizing Finite Automata
13. Linearization i 2 i k − 3 x 2 � 1 i 1 · · · x i 1 � 1 1 � i 1 � i k − 3 � i 2 x 2 � 1 i 2 · · · x i 2 � � 2 2 i 2 I = { i 1 , . . . , i k } �→ D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � � i 2 i k − 3 x 2 1 i k · · · x i k � � k k i k k × k Then one proves that: • the polynomials D ( P 1 ) , . . . , D ( P ℓ ) are linearly independent whenever the k -subsets P 1 , . . . , P ℓ form a renewing sequence; • the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Mikhail Volkov Synchronizing Finite Automata
14. Linearization, Step 1 i k − 3 i 2 x 2 � 1 · · · � i 1 x i 1 1 1 i 1 � � � i 2 i k − 3 x 2 � 1 i 2 · · · x i 2 � 2 � 2 i 2 D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � i k − 3 � i 2 x 2 1 i k · · · x i k � � k i k k k × k Suppose that k -subsets P 1 , . . . , P ℓ form a renewing sequence but D ( P 1 ) , . . . , D ( P ℓ ) are linearly dependent. Then some polynomial D ( P j ) should be expressible as a linear combination of the preceding polynomials D ( P 1 ) , . . . , D ( P j − 1 ). By the definition of a renewing sequence, P j contains a couple { p , p ′ } such that { p , p ′ } � P i for all i < j . If we substitute x p = p , x p ′ = p ′ and x t = 0 for t � = p , p ′ in each polynomial D ( P 1 ) , . . . , D ( P j ), then the polynomials D ( P 1 ) , . . . , D ( P j − 1 ) vanish (since the two last columns in each of the resulting determinants become proportional) and so does any linear combination of the polynomials. Mikhail Volkov Synchronizing Finite Automata
14. Linearization, Step 1 i k − 3 i 2 x 2 � 1 · · · � i 1 x i 1 1 1 i 1 � � � i 2 i k − 3 x 2 � 1 i 2 · · · x i 2 � 2 � 2 i 2 D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � i k − 3 � i 2 x 2 1 i k · · · x i k � � k i k k k × k Suppose that k -subsets P 1 , . . . , P ℓ form a renewing sequence but D ( P 1 ) , . . . , D ( P ℓ ) are linearly dependent. Then some polynomial D ( P j ) should be expressible as a linear combination of the preceding polynomials D ( P 1 ) , . . . , D ( P j − 1 ). By the definition of a renewing sequence, P j contains a couple { p , p ′ } such that { p , p ′ } � P i for all i < j . If we substitute x p = p , x p ′ = p ′ and x t = 0 for t � = p , p ′ in each polynomial D ( P 1 ) , . . . , D ( P j ), then the polynomials D ( P 1 ) , . . . , D ( P j − 1 ) vanish (since the two last columns in each of the resulting determinants become proportional) and so does any linear combination of the polynomials. Mikhail Volkov Synchronizing Finite Automata
14. Linearization, Step 1 i k − 3 i 2 x 2 � 1 · · · � i 1 x i 1 1 1 i 1 � � � i 2 i k − 3 x 2 � 1 i 2 · · · x i 2 � 2 � 2 i 2 D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � i k − 3 � i 2 x 2 1 i k · · · x i k � � k i k k k × k Suppose that k -subsets P 1 , . . . , P ℓ form a renewing sequence but D ( P 1 ) , . . . , D ( P ℓ ) are linearly dependent. Then some polynomial D ( P j ) should be expressible as a linear combination of the preceding polynomials D ( P 1 ) , . . . , D ( P j − 1 ). By the definition of a renewing sequence, P j contains a couple { p , p ′ } such that { p , p ′ } � P i for all i < j . If we substitute x p = p , x p ′ = p ′ and x t = 0 for t � = p , p ′ in each polynomial D ( P 1 ) , . . . , D ( P j ), then the polynomials D ( P 1 ) , . . . , D ( P j − 1 ) vanish (since the two last columns in each of the resulting determinants become proportional) and so does any linear combination of the polynomials. Mikhail Volkov Synchronizing Finite Automata
14. Linearization, Step 1 i k − 3 i 2 x 2 � 1 · · · � i 1 x i 1 1 1 i 1 � � � i 2 i k − 3 x 2 � 1 i 2 · · · x i 2 � 2 � 2 i 2 D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � i k − 3 � i 2 x 2 1 i k · · · x i k � � k i k k k × k Suppose that k -subsets P 1 , . . . , P ℓ form a renewing sequence but D ( P 1 ) , . . . , D ( P ℓ ) are linearly dependent. Then some polynomial D ( P j ) should be expressible as a linear combination of the preceding polynomials D ( P 1 ) , . . . , D ( P j − 1 ). By the definition of a renewing sequence, P j contains a couple { p , p ′ } such that { p , p ′ } � P i for all i < j . If we substitute x p = p , x p ′ = p ′ and x t = 0 for t � = p , p ′ in each polynomial D ( P 1 ) , . . . , D ( P j ), then the polynomials D ( P 1 ) , . . . , D ( P j − 1 ) vanish (since the two last columns in each of the resulting determinants become proportional) and so does any linear combination of the polynomials. Mikhail Volkov Synchronizing Finite Automata
14. Linearization, Step 1 i k − 3 i 2 x 2 � 1 · · · � i 1 x i 1 1 1 i 1 � � � i 2 i k − 3 x 2 � 1 i 2 · · · x i 2 � 2 � 2 i 2 D ( I ) = � . . . . . . � ... . . . . . . � � . . . . . . � � � i k − 3 � i 2 x 2 1 i k · · · x i k � � k i k k k × k Suppose that k -subsets P 1 , . . . , P ℓ form a renewing sequence but D ( P 1 ) , . . . , D ( P ℓ ) are linearly dependent. Then some polynomial D ( P j ) should be expressible as a linear combination of the preceding polynomials D ( P 1 ) , . . . , D ( P j − 1 ). By the definition of a renewing sequence, P j contains a couple { p , p ′ } such that { p , p ′ } � P i for all i < j . If we substitute x p = p , x p ′ = p ′ and x t = 0 for t � = p , p ′ in each polynomial D ( P 1 ) , . . . , D ( P j ), then the polynomials D ( P 1 ) , . . . , D ( P j − 1 ) vanish (since the two last columns in each of the resulting determinants become proportional) and so does any linear combination of the polynomials. Mikhail Volkov Synchronizing Finite Automata
15. Linearization, Step 1, completed i 2 i k − 3 p 2 � 1 · · · � i 1 p 1 � 1 � i k − 3 � i 2 ( p ′ ) 2 � 1 · · · p ′ i 2 � � 2 2 � i k − 3 � i 2 1 i 3 · · · 0 0 D ( P j ) = � � 3 3 � . . . . . . � ... . . . . . . � � . . . . . . � � � � i k − 3 i 2 1 i k · · · 0 0 � � k k k × k (For simplicity, here we assume that i 1 = p , i 2 = p ′ .) The value of D ( P j ) is the determinant being the product of a Vandermonde ( k − 2) × ( k − 2)-determinant with the p 2 � � p � � 2 × 2-determinant � , whence this value is not 0. � ( p ′ ) 2 � p ′ � Hence D ( P j ) cannot be equal to a linear combination of D ( P 1 ) , . . . , D ( P j − 1 ). Mikhail Volkov Synchronizing Finite Automata
15. Linearization, Step 1, completed i 2 i k − 3 p 2 � 1 · · · � i 1 p 1 � 1 � i k − 3 � i 2 ( p ′ ) 2 � 1 · · · p ′ i 2 � � 2 2 � i k − 3 � i 2 1 i 3 · · · 0 0 D ( P j ) = � � 3 3 � . . . . . . � ... . . . . . . � � . . . . . . � � � � i k − 3 i 2 1 i k · · · 0 0 � � k k k × k (For simplicity, here we assume that i 1 = p , i 2 = p ′ .) The value of D ( P j ) is the determinant being the product of a Vandermonde ( k − 2) × ( k − 2)-determinant with the p 2 � � p � � 2 × 2-determinant � , whence this value is not 0. � ( p ′ ) 2 � p ′ � Hence D ( P j ) cannot be equal to a linear combination of D ( P 1 ) , . . . , D ( P j − 1 ). Mikhail Volkov Synchronizing Finite Automata
16. Linearization, Step 2 Now we aim to prove that the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Take an arbitrary k -element subset I = { i 1 , . . . , i k } of Q . We claim that the polynomial D ( I ) is a linear combination of D ( T 1 ) , . . . , D ( T s ). We induct on the cardinality of the set I \ W . If | I \ W | = 2, then I is the union of W with some couple from Q \ W , whence I = T i for some i = 1 , . . . , s . Thus, D ( I ) = D ( T i ) and our claim holds true. Mikhail Volkov Synchronizing Finite Automata
16. Linearization, Step 2 Now we aim to prove that the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Take an arbitrary k -element subset I = { i 1 , . . . , i k } of Q . We claim that the polynomial D ( I ) is a linear combination of D ( T 1 ) , . . . , D ( T s ). We induct on the cardinality of the set I \ W . If | I \ W | = 2, then I is the union of W with some couple from Q \ W , whence I = T i for some i = 1 , . . . , s . Thus, D ( I ) = D ( T i ) and our claim holds true. Mikhail Volkov Synchronizing Finite Automata
16. Linearization, Step 2 Now we aim to prove that the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Take an arbitrary k -element subset I = { i 1 , . . . , i k } of Q . We claim that the polynomial D ( I ) is a linear combination of D ( T 1 ) , . . . , D ( T s ). We induct on the cardinality of the set I \ W . If | I \ W | = 2, then I is the union of W with some couple from Q \ W , whence I = T i for some i = 1 , . . . , s . Thus, D ( I ) = D ( T i ) and our claim holds true. Mikhail Volkov Synchronizing Finite Automata
16. Linearization, Step 2 Now we aim to prove that the polynomials D ( T 1 ) , . . . , D ( T s ) (derived from the “standard” sequence) generate the linear space spanned by all polynomials of the form D ( I ). Take an arbitrary k -element subset I = { i 1 , . . . , i k } of Q . We claim that the polynomial D ( I ) is a linear combination of D ( T 1 ) , . . . , D ( T s ). We induct on the cardinality of the set I \ W . If | I \ W | = 2, then I is the union of W with some couple from Q \ W , whence I = T i for some i = 1 , . . . , s . Thus, D ( I ) = D ( T i ) and our claim holds true. Mikhail Volkov Synchronizing Finite Automata
17. Linearization, Step 2, continued If | I \ W | > 2, there is i 0 ∈ W \ I . Let I ′ = I ∪ { i 0 } . There exists a polynomial p ( x ) = α 0 + α 1 x + α 2 x 2 · · · + α k − 3 x k − 3 over R such that p ( i 0 ) = 1 and p ( i ) = 0 for all i ∈ W \ { i 0 } . Consider the determinant � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i 2 i k − 3 x 2 p ( i 2 ) 1 i 2 · · · x i 2 � � ∆ = . 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k i k � k � ( k +1) × ( k +1) Clearly, ∆ = 0 as the first column is the sum of the next k − 2 columns with the coefficients α 0 , α 1 , α 2 , . . . , α k − 3 . Mikhail Volkov Synchronizing Finite Automata
17. Linearization, Step 2, continued If | I \ W | > 2, there is i 0 ∈ W \ I . Let I ′ = I ∪ { i 0 } . There exists a polynomial p ( x ) = α 0 + α 1 x + α 2 x 2 · · · + α k − 3 x k − 3 over R such that p ( i 0 ) = 1 and p ( i ) = 0 for all i ∈ W \ { i 0 } . Consider the determinant � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i 2 i k − 3 x 2 p ( i 2 ) 1 i 2 · · · x i 2 � � ∆ = . 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k i k � k � ( k +1) × ( k +1) Clearly, ∆ = 0 as the first column is the sum of the next k − 2 columns with the coefficients α 0 , α 1 , α 2 , . . . , α k − 3 . Mikhail Volkov Synchronizing Finite Automata
17. Linearization, Step 2, continued If | I \ W | > 2, there is i 0 ∈ W \ I . Let I ′ = I ∪ { i 0 } . There exists a polynomial p ( x ) = α 0 + α 1 x + α 2 x 2 · · · + α k − 3 x k − 3 over R such that p ( i 0 ) = 1 and p ( i ) = 0 for all i ∈ W \ { i 0 } . Consider the determinant � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i 2 i k − 3 x 2 p ( i 2 ) 1 i 2 · · · x i 2 � � ∆ = . 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k i k � k � ( k +1) × ( k +1) Clearly, ∆ = 0 as the first column is the sum of the next k − 2 columns with the coefficients α 0 , α 1 , α 2 , . . . , α k − 3 . Mikhail Volkov Synchronizing Finite Automata
17. Linearization, Step 2, continued If | I \ W | > 2, there is i 0 ∈ W \ I . Let I ′ = I ∪ { i 0 } . There exists a polynomial p ( x ) = α 0 + α 1 x + α 2 x 2 · · · + α k − 3 x k − 3 over R such that p ( i 0 ) = 1 and p ( i ) = 0 for all i ∈ W \ { i 0 } . Consider the determinant � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i 2 i k − 3 x 2 p ( i 2 ) 1 i 2 · · · x i 2 � � ∆ = . 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k i k � k � ( k +1) × ( k +1) Clearly, ∆ = 0 as the first column is the sum of the next k − 2 columns with the coefficients α 0 , α 1 , α 2 , . . . , α k − 3 . Mikhail Volkov Synchronizing Finite Automata
18. Linearization, Step 2, completed Expanding ∆ by the first column gives the identity k ( − 1) j p ( i j ) D ( I ′ \ { i j } ) = 0 . � j =0 Since p ( i 0 ) = 1 and I ′ \ { i 0 } = I , the identity rewrites as k ( − 1) j +1 p ( i j ) D ( I ′ \ { i j } ) , � D ( I ) = j =1 and since p ( i ) = 0 for all i ∈ W \ { i 0 } , all the non-zero summands in the right-hand side are such that i j / ∈ W . Mikhail Volkov Synchronizing Finite Automata
18. Linearization, Step 2, completed Expanding ∆ by the first column gives the identity k ( − 1) j p ( i j ) D ( I ′ \ { i j } ) = 0 . � j =0 � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i 2 i k − 3 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i k − 3 i 2 x 2 p ( i 2 ) 1 i 2 · · · x i 2 � � ∆ = 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k k i k � � ( k +1) × ( k +1) Since p ( i 0 ) = 1 and I ′ \ { i 0 } = I , the identity rewrites as k ( − 1) j +1 p ( i j ) D ( I ′ \ { i j } ) , � D ( I ) = j =1 and since p ( i ) = 0 for all i ∈ W \ { i 0 } , all the non-zero summands in the right-hand side are such that i j / ∈ W . Mikhail Volkov Synchronizing Finite Automata
18. Linearization, Step 2, completed Expanding ∆ by the first column gives the identity k ( − 1) j p ( i j ) D ( I ′ \ { i j } ) = 0 . � j =0 � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i k − 3 i 2 x 2 � p ( i 2 ) 1 i 2 · · · x i 2 � 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k k i k � � ( k +1) × ( k +1) Since p ( i 0 ) = 1 and I ′ \ { i 0 } = I , the identity rewrites as k ( − 1) j +1 p ( i j ) D ( I ′ \ { i j } ) , � D ( I ) = j =1 and since p ( i ) = 0 for all i ∈ W \ { i 0 } , all the non-zero summands in the right-hand side are such that i j / ∈ W . Mikhail Volkov Synchronizing Finite Automata
18. Linearization, Step 2, completed Expanding ∆ by the first column gives the identity k ( − 1) j p ( i j ) D ( I ′ \ { i j } ) = 0 . � j =0 � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i k − 3 i 2 x 2 � p ( i 2 ) 1 i 2 · · · x i 2 � 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k k i k � � ( k +1) × ( k +1) Since p ( i 0 ) = 1 and I ′ \ { i 0 } = I , the identity rewrites as k ( − 1) j +1 p ( i j ) D ( I ′ \ { i j } ) , � D ( I ) = j =1 and since p ( i ) = 0 for all i ∈ W \ { i 0 } , all the non-zero summands in the right-hand side are such that i j / ∈ W . Mikhail Volkov Synchronizing Finite Automata
18. Linearization, Step 2, completed Expanding ∆ by the first column gives the identity k ( − 1) j p ( i j ) D ( I ′ \ { i j } ) = 0 . � j =0 � i k − 3 � i 2 x 2 p ( i 0 ) 1 i 0 · · · x i 0 � � 0 0 i 0 � � i k − 3 i 2 x 2 p ( i 1 ) 1 · · · i 1 x i 1 � � 1 1 i 1 � � i k − 3 i 2 x 2 � p ( i 2 ) 1 i 2 · · · x i 2 � 2 2 i 2 � � . . . . . . . ... � � . . . . . . . . . . . . . . � � � � i k − 3 i 2 x 2 � p ( i k ) 1 · · · � i k x i k k k i k � � ( k +1) × ( k +1) Since p ( i 0 ) = 1 and I ′ \ { i 0 } = I , the identity rewrites as k ( − 1) j +1 p ( i j ) D ( I ′ \ { i j } ) , � D ( I ) = j =1 and since p ( i ) = 0 for all i ∈ W \ { i 0 } , all the non-zero summands in the right-hand side are such that i j / ∈ W . Mikhail Volkov Synchronizing Finite Automata
18. Linearization, Step 2, completed Expanding ∆ by the first column gives the identity k ( − 1) j p ( i j ) D ( I ′ \ { i j } ) = 0 . � j =0 Since p ( i 0 ) = 1 and I ′ \ { i 0 } = I , the identity rewrites as k ( − 1) j +1 p ( i j ) D ( I ′ \ { i j } ) , � D ( I ) = j =1 and since p ( i ) = 0 for all i ∈ W \ { i 0 } , all the non-zero summands in the right-hand side are such that i j / ∈ W . For each such i j , we have ( I ′ \{ i j } ) \ W = I ′ \ ( W ∪{ i j } ) = ( I ∪{ i 0 } ) \ ( W ∪{ i j } ) = ( I \ W ) \{ i j } , whence | ( I ′ \ { i j } ) \ W | = | I \ W | − 1 and by the inductive assumption, the polynomials D ( I ′ \ { i j } ) are linear combinations of D ( T 1 ) , . . . , D ( T s ). Mikhail Volkov Synchronizing Finite Automata
19. Results Thus, in the step when k states are still to be compressed, the compression can always be achieved by applying a suitable word of � n − k +2 � length ≤ . 2 Summing up over k = n , . . . , 2, we see that the greedy algorithm always returns a reset word of length ≤ n 3 − n : 6 � 2 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 2 2 2 2 2 � 3 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 3 2 2 2 2 = n 3 − n � 4 � � 4 � � n − 1 � � n � � n + 1 � + + · · · + + = · · · = . 3 2 2 2 3 6 Mikhail Volkov Synchronizing Finite Automata
19. Results Thus, in the step when k states are still to be compressed, the compression can always be achieved by applying a suitable word of � n − k +2 � length ≤ . 2 Summing up over k = n , . . . , 2, we see that the greedy algorithm always returns a reset word of length ≤ n 3 − n : 6 � 2 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 2 2 2 2 2 � 3 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 3 2 2 2 2 = n 3 − n � 4 � � 4 � � n − 1 � � n � � n + 1 � + + · · · + + = · · · = . 3 2 2 2 3 6 Mikhail Volkov Synchronizing Finite Automata
19. Results Thus, in the step when k states are still to be compressed, the compression can always be achieved by applying a suitable word of � n − k +2 � length ≤ . 2 Summing up over k = n , . . . , 2, we see that the greedy algorithm always returns a reset word of length ≤ n 3 − n : 6 � 2 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 2 2 2 2 2 � 3 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 3 2 2 2 2 = n 3 − n � 4 � � 4 � � n − 1 � � n � � n + 1 � + + · · · + + = · · · = . 3 2 2 2 3 6 Mikhail Volkov Synchronizing Finite Automata
19. Results Thus, in the step when k states are still to be compressed, the compression can always be achieved by applying a suitable word of � n − k +2 � length ≤ . 2 Summing up over k = n , . . . , 2, we see that the greedy algorithm always returns a reset word of length ≤ n 3 − n : 6 � 2 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 2 2 2 2 2 � 3 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 3 2 2 2 2 = n 3 − n � 4 � � 4 � � n − 1 � � n � � n + 1 � + + · · · + + = · · · = . 3 2 2 2 3 6 Mikhail Volkov Synchronizing Finite Automata
19. Results Thus, in the step when k states are still to be compressed, the compression can always be achieved by applying a suitable word of � n − k +2 � length ≤ . 2 Summing up over k = n , . . . , 2, we see that the greedy algorithm always returns a reset word of length ≤ n 3 − n : 6 � 2 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 2 2 2 2 2 � 3 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 3 2 2 2 2 = n 3 − n � 4 � � 4 � � n − 1 � � n � � n + 1 � + + · · · + + = · · · = . 3 2 2 2 3 6 Mikhail Volkov Synchronizing Finite Automata
19. Results Thus, in the step when k states are still to be compressed, the compression can always be achieved by applying a suitable word of � n − k +2 � length ≤ . 2 Summing up over k = n , . . . , 2, we see that the greedy algorithm always returns a reset word of length ≤ n 3 − n : 6 � 2 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 2 2 2 2 2 � 3 � � 3 � � 4 � � n − 1 � � n � + + + · · · + + = 3 2 2 2 2 = n 3 − n � 4 � � 4 � � n − 1 � � n � � n + 1 � + + · · · + + = · · · = . 3 2 2 2 3 6 Mikhail Volkov Synchronizing Finite Automata
20. The ˇ Cern´ y Series Suppose a synchronizing automaton has n states. What is its reset threshold, i.e., the minimum length of its reset words? We have just presented an upper bound: there always exists a reset word of length n 3 − n . This bound was obtained by Jean-´ Eric Pin in 6 1983 on the basis of Peter Frankl’s result. What about a lower bound? In 1964 Jan ˇ Cern´ y constructed a series C n , n = 2 , 3 , . . . , of synchronizing automata over 2 letters. The states of C n are the residues modulo n , and the input letters a and b act as follows: δ (0 , a ) = 1 , δ ( m , a ) = m for 0 < m < n , δ ( m , b ) = m +1 (mod n ) . The automaton used as the leading example is C 4 . Mikhail Volkov Synchronizing Finite Automata
20. The ˇ Cern´ y Series Suppose a synchronizing automaton has n states. What is its reset threshold, i.e., the minimum length of its reset words? We have just presented an upper bound: there always exists a reset word of length n 3 − n . This bound was obtained by Jean-´ Eric Pin in 6 1983 on the basis of Peter Frankl’s result. What about a lower bound? In 1964 Jan ˇ Cern´ y constructed a series C n , n = 2 , 3 , . . . , of synchronizing automata over 2 letters. The states of C n are the residues modulo n , and the input letters a and b act as follows: δ (0 , a ) = 1 , δ ( m , a ) = m for 0 < m < n , δ ( m , b ) = m +1 (mod n ) . The automaton used as the leading example is C 4 . Mikhail Volkov Synchronizing Finite Automata
20. The ˇ Cern´ y Series Suppose a synchronizing automaton has n states. What is its reset threshold, i.e., the minimum length of its reset words? We have just presented an upper bound: there always exists a reset word of length n 3 − n . This bound was obtained by Jean-´ Eric Pin in 6 1983 on the basis of Peter Frankl’s result. What about a lower bound? In 1964 Jan ˇ Cern´ y constructed a series C n , n = 2 , 3 , . . . , of synchronizing automata over 2 letters. The states of C n are the residues modulo n , and the input letters a and b act as follows: δ (0 , a ) = 1 , δ ( m , a ) = m for 0 < m < n , δ ( m , b ) = m +1 (mod n ) . The automaton used as the leading example is C 4 . Mikhail Volkov Synchronizing Finite Automata
20. The ˇ Cern´ y Series Suppose a synchronizing automaton has n states. What is its reset threshold, i.e., the minimum length of its reset words? We have just presented an upper bound: there always exists a reset word of length n 3 − n . This bound was obtained by Jean-´ Eric Pin in 6 1983 on the basis of Peter Frankl’s result. What about a lower bound? In 1964 Jan ˇ Cern´ y constructed a series C n , n = 2 , 3 , . . . , of synchronizing automata over 2 letters. The states of C n are the residues modulo n , and the input letters a and b act as follows: δ (0 , a ) = 1 , δ ( m , a ) = m for 0 < m < n , δ ( m , b ) = m +1 (mod n ) . The automaton used as the leading example is C 4 . Mikhail Volkov Synchronizing Finite Automata
20. The ˇ Cern´ y Series Suppose a synchronizing automaton has n states. What is its reset threshold, i.e., the minimum length of its reset words? We have just presented an upper bound: there always exists a reset word of length n 3 − n . This bound was obtained by Jean-´ Eric Pin in 6 1983 on the basis of Peter Frankl’s result. What about a lower bound? In 1964 Jan ˇ Cern´ y constructed a series C n , n = 2 , 3 , . . . , of synchronizing automata over 2 letters. The states of C n are the residues modulo n , and the input letters a and b act as follows: δ (0 , a ) = 1 , δ ( m , a ) = m for 0 < m < n , δ ( m , b ) = m +1 (mod n ) . The automaton used as the leading example is C 4 . Mikhail Volkov Synchronizing Finite Automata
20. The ˇ Cern´ y Series Suppose a synchronizing automaton has n states. What is its reset threshold, i.e., the minimum length of its reset words? We have just presented an upper bound: there always exists a reset word of length n 3 − n . This bound was obtained by Jean-´ Eric Pin in 6 1983 on the basis of Peter Frankl’s result. What about a lower bound? In 1964 Jan ˇ Cern´ y constructed a series C n , n = 2 , 3 , . . . , of synchronizing automata over 2 letters. The states of C n are the residues modulo n , and the input letters a and b act as follows: δ (0 , a ) = 1 , δ ( m , a ) = m for 0 < m < n , δ ( m , b ) = m +1 (mod n ) . The automaton used as the leading example is C 4 . Mikhail Volkov Synchronizing Finite Automata
21. The ˇ Cern´ y Series Here is a generic automaton from the ˇ Cern´ y series: a a a b 0 b n − 1 1 b b a a n − 2 2 . . . . . . ˇ Cern´ y has proved that the shortest reset word for C n is ( ab n − 1 ) n − 2 a of length ( n − 1) 2 . Mikhail Volkov Synchronizing Finite Automata
21. The ˇ Cern´ y Series Here is a generic automaton from the ˇ Cern´ y series: a a a b 0 b n − 1 1 b b a a n − 2 2 . . . . . . ˇ Cern´ y has proved that the shortest reset word for C n is ( ab n − 1 ) n − 2 a of length ( n − 1) 2 . Mikhail Volkov Synchronizing Finite Automata
22. The ˇ Cern´ y Automaton Let w be a shortest reset word for C n . It must end with a and every other occurrence of a in w is followed by an occurrence of b . Thus, w = w ′ a where w ′ can be rewritten into a word v over the alphabet { b , c } where c := ab . Since w ′ and v act in the same way, the word vc is a reset word for the automaton induced by the actions of b and c . We denote this automaton by W n and refer to it as to the Wielandt automaton. Mikhail Volkov Synchronizing Finite Automata
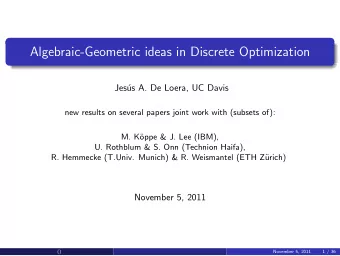
22. The ˇ Cern´ y Automaton Let w be a shortest reset word for C n . It must end with a and every other occurrence of a in w is followed by an occurrence of b . 1 1 a , b b , c b b a c n n 2 2 a b b b , c b , c . . . . . . n − 1 n − 1 3 3 a a Thus, w = w ′ a where w ′ can be rewritten into a word v over the alphabet { b , c } where c := ab . Since w ′ and v act in the same way, the word vc is a reset word for the automaton induced by the actions of b and c . We denote this automaton by W n and refer to it as to the Wielandt automaton. Mikhail Volkov Synchronizing Finite Automata
22. The ˇ Cern´ y Automaton Let w be a shortest reset word for C n . It must end with a and every other occurrence of a in w is followed by an occurrence of b . 1 1 a , b b , c b b a c n n 2 2 a b b b , c b , c . . . . . . n − 1 n − 1 3 3 a a Thus, w = w ′ a where w ′ can be rewritten into a word v over the alphabet { b , c } where c := ab . Since w ′ and v act in the same way, the word vc is a reset word for the automaton induced by the actions of b and c . We denote this automaton by W n and refer to it as to the Wielandt automaton. Mikhail Volkov Synchronizing Finite Automata
22. The ˇ Cern´ y Automaton Let w be a shortest reset word for C n . It must end with a and every other occurrence of a in w is followed by an occurrence of b . 1 1 a , b b , c b b a c n n 2 2 a b b b , c b , c . . . . . . n − 1 n − 1 3 3 a a Thus, w = w ′ a where w ′ can be rewritten into a word v over the alphabet { b , c } where c := ab . Since w ′ and v act in the same way, the word vc is a reset word for the automaton induced by the actions of b and c . We denote this automaton by W n and refer to it as to the Wielandt automaton. Mikhail Volkov Synchronizing Finite Automata
22. The ˇ Cern´ y Automaton Let w be a shortest reset word for C n . It must end with a and every other occurrence of a in w is followed by an occurrence of b . 1 1 a , b b , c b b a c n n 2 2 a b b b , c b , c . . . . . . n − 1 n − 1 3 3 a a Thus, w = w ′ a where w ′ can be rewritten into a word v over the alphabet { b , c } where c := ab . Since w ′ and v act in the same way, the word vc is a reset word for the automaton induced by the actions of b and c . We denote this automaton by W n and refer to it as to the Wielandt automaton. Mikhail Volkov Synchronizing Finite Automata
22. The Wielandt Automaton If u ∈ { b , c } ∗ , the word uvc also is a reset word for W n and it also brings the automaton to 2. Hence, for every ℓ ≥ | vc | , there is a path of length ℓ in W n from any given state i to 2. In particular, for every ℓ ≥ | vc | there is a cycle of length ℓ in W n . The graph of W n has simple cycles only of two lengths: n and n − 1. Each cycle of W n must consist of simple cycles of these two lengths whence each number ℓ ≥ | vc | must be expressible as a non-negative integer combination of n and n − 1. Lemma . If k 1 , k 2 ∈ N are relatively prime, then k 1 k 2 − k 1 − k 2 is the largest integer that is not expressible as a non-negative integer combination of k 1 and k 2 . Lemma implies that | vc | > n ( n − 1) − n − ( n − 1) = n 2 − 3 n + 1. Suppose that | vc | = n 2 − 3 n + 2. Then there is a path of this length from 1 to 2. Every outgoing edge of 1 leads to 2, and thus, in the path it must be followed by a cycle of length n 2 − 3 n + 1, but no cycle of such length may exist by Lemma. Hence | vc | ≥ n 2 − 3 n + 3. Mikhail Volkov Synchronizing Finite Automata
22. The Wielandt Automaton If u ∈ { b , c } ∗ , the word uvc also is a reset word for W n and it also brings the automaton to 2. Hence, for every ℓ ≥ | vc | , there is a path of length ℓ in W n from any given state i to 2. In particular, for every ℓ ≥ | vc | there is a cycle of length ℓ in W n . The graph of W n has simple cycles only of two lengths: n and n − 1. Each cycle of W n must consist of simple cycles of these two lengths whence each number ℓ ≥ | vc | must be expressible as a non-negative integer combination of n and n − 1. Lemma . If k 1 , k 2 ∈ N are relatively prime, then k 1 k 2 − k 1 − k 2 is the largest integer that is not expressible as a non-negative integer combination of k 1 and k 2 . Lemma implies that | vc | > n ( n − 1) − n − ( n − 1) = n 2 − 3 n + 1. Suppose that | vc | = n 2 − 3 n + 2. Then there is a path of this length from 1 to 2. Every outgoing edge of 1 leads to 2, and thus, in the path it must be followed by a cycle of length n 2 − 3 n + 1, but no cycle of such length may exist by Lemma. Hence | vc | ≥ n 2 − 3 n + 3. Mikhail Volkov Synchronizing Finite Automata
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.