Search for Frame- -Dragging Dragging- -Like Signals in the - PowerPoint PPT Presentation
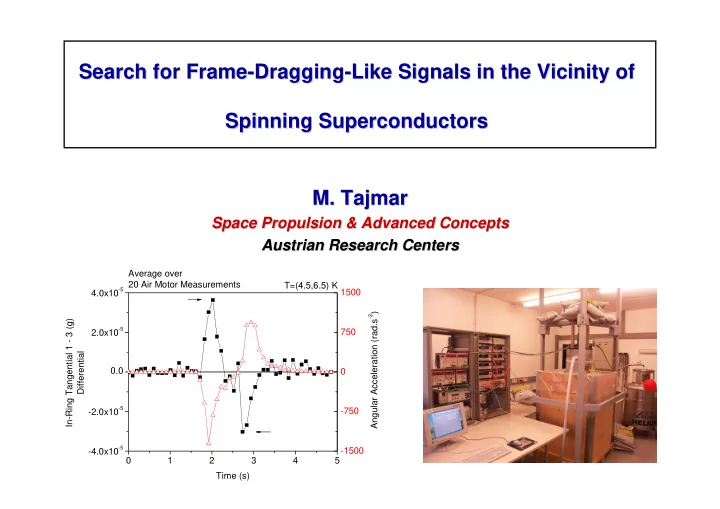
Search for Frame- -Dragging Dragging- -Like Signals in the Vicinity of Like Signals in the Vicinity of Search for Frame Spinning Superconductors Spinning Superconductors M. Tajmar M. Tajmar Space Propulsion & Advanced Advanced
Search for Frame- -Dragging Dragging- -Like Signals in the Vicinity of Like Signals in the Vicinity of Search for Frame Spinning Superconductors Spinning Superconductors M. Tajmar M. Tajmar Space Propulsion & Advanced Advanced Concepts Concepts Space Propulsion & Austrian Research Centers Research Centers Austrian Average over 20 Air Motor Measurements T=(4.5,6.5) K -5 1500 4.0x10 -2 ) In-Ring Tangential 1 - 3 (g) Angular Acceleration (rad.s -5 750 2.0x10 Differential 0.0 0 -5 -750 -2.0x10 -5 -1500 -4.0x10 0 1 2 3 4 5 Time (s)
The Classical Classical Picture of Picture of Gravity Gravity The Important Aspect Aspect of GRT: of GRT: FRAME DRAGGING FRAME DRAGGING Important • Very small effect in vicinity of massive spinning objects • Evidence from Gravity Probe-B, LAGEOS and other observations • Impossible to generate frame-dragging in an Earth laboratory - we would need a "Neutron-Star in the Lab" Does it it make make a a difference difference if if the the test test mass mass is is superconducting superconducting ? ? Does
London Moment London Moment = ∇ × + = * * * rot p m v q B 0 v v 2 m = − ⋅ ω London Moment London Moment B e m Theoretical − = Cooper Pair 0.999992 Prediction 2 m e m Precision − = Cooper Pair 1.000084(2 1) Tate et al, PRL, 62 (8), 845 (1989) Measurement 2 m e Unfortunately, the reason for the discrepancy between the experiment and all theories remains unclear. Jiang, Y., Liu, M., Physical Review B , 63 , 2001, 184506
Gravitomagetic Correction Correction Proposal Proposal Gravitomagetic Tajmar, M., de Matos, C.J., "Gravitomagnetic Field of a Rotating Superconductor and of a Rotating Superfluid", Physica C , 385 (4), 2003, pp. 551-554 B B ω g = ∇ × + + = * * * * rot p m v q B m B 0 g ⎛ ⎞ v − Δ * v v v m m m ⎜ ⎟ = ω ⋅ = ω = × − 4 ⋅ ω B g 2 2 1 . 84 10 ⎜ ⎟ ⎝ ⎠ m m * m … measured Cooper-Pair Mass No classical classical explanation explanation No m … theoretical Cooper-Pair Mass Gravitomagnetic Field Field Necessary Necessary to to Solve Solve Anomaly Anomaly in Nb in Nb Gravitomagnetic Superconductor at T=5K at T=5K Superconductor
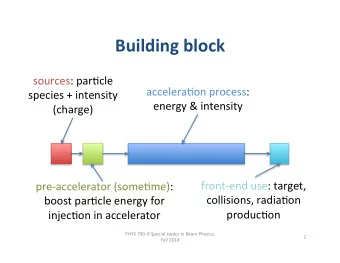
Experimental Design Experimental Design
Experimental Concept Experimental Concept Use of Gyroscopes and Accelerometers to Detect Frame-Dragging-Like and Gravitational-Like Fields Induced From Angular Velocity and Acceleration of Spinning Superconductors MEMS MEMS Fiber- -Optic Optic Fiber Accelerometer Accelerometer Gyroscope Gyroscope (Colibrys Colibrys SF1500) SF1500) ( (KVH DSP- (KVH DSP -3000) 3000) Noise: 300 ng.Hz -0.5 Noise: 2.10 -5 rad.s -1 .Hz -0.5
Experimental Setup Experimental Setup Accelerometer Setup (Example) Accelerometer Setup (Example) Gyroscope Setup (Example) Gyroscope Setup (Example) Hall Sensor Hall Sensor
Cryostat Assembly Cryostat Assembly Sensor Chamber Mounted on Separate Heavy Structure Ensures Mechanical De-Coupling
Accelerometer Accelerometer Measurements Measurements
Sensor – – Vacuum Chamber Vacuum Chamber Sensor • Colibrys SF1500 accelerometers mounted on all positions • Hall sensor for magnetic fields • Kapton heaters and PT-100 resistors for temperature control • MLI insulation installed • Vacuum chamber evacuated and leak checked Superconductor glued in STYCAST Superconductor glued in STYCAST Epoxy and Si Si- -Diode for Diode for Epoxy and Accelerometer Sensor Sensor Vacuum Chamber Accelerometer Sensor Sensor Vacuum Chamber Temperature Measurement Temperature Measurement Flange Flange
Accelerometer Facility Accelerometer Facility • More than one year of calibration including three major facility adjustments (lessons learned) • Special low-temperature bearing (MoS 2 coating) and magnetic bearing • Evaluation of influence due to EM fields, ground noise, acoustic noise, ... • Two different accelerometers used (Silicon Design and Colibrys) • Influence of field coil and trapped magnetic fields • Determination of exact transition temperature using Meissner-Ochsenfeld Effect and Hall Sensor • Radiation shields and heat conductivity improvements • Active thermal management on sensors The most important problem was to The most important problem was to hold the low temperature during operation hold the low temperature during operation. At the . At the end the change in temperature during rotation was < 1K. end the change in temperature during rotation was < 1K. Additional problems were arising due to the strong expansion of helium gas from the strong expansion of helium gas from the Additional problems were arising due to the liquid phase liquid phase. .
Accelerometer Setup – – Error Error Sources Sources Accelerometer Setup 1000 • Air motor for low E/M noise 0.0548 800 In-Ring Radial Acceleration [g] 600 • Magnetic field influence negligible 0.0546 -1 ] 400 (5x10 -4 g/T) Angular Speed [rad.s 200 0.0544 0 • Dominant error source: vibration -200 0.0542 rectification from acoustic noise -400 -600 0.0540 -800 0.0538 -1000 10 15 20 25 30 35 40 45 50 Time [s]
Niobium Measurements Niobium Measurements Temperature Range: 4 – – 6 K 6 K Temperature Range: 4 0.0002 2000 1500 -2 ) Angular Acceleration (rad.s In-Ring Tangential (g) 0.0001 1000 500 Differential 0.0000 0 -500 -0.0001 -1000 -1500 -0.0002 -2000 0 2 4 6 8 10 12 14 16 Time (s) • Factor 3- -4 above Noise Level 4 above Noise Level • Factor 3 • Difference seen in Alternating Profiles • Difference seen in Alternating Profiles • About one order of magnitude higher than • About one order of magnitude higher than First Sign of a Induced First Sign of a Induced theoretical prediction theoretical prediction Acceleration Fields! Acceleration Fields! • • Result can not explain Tate’s Cooper- Result can not explain Tate’s Cooper -Pair Pair Mass Anomaly – Mass Anomaly – but it is a contribution but it is a contribution
Niobium Curl Measurements Niobium Curl Measurements Superconducting Non- -Superconducting Superconducting Superconducting Non Average over Average over 20 Air Motor Measurements T=(4.5,6.5) K 88 Air Motor Measurements T=(10,14) K -5 -5 1500 1500 4.0x10 4.0x10 -2 ) -2 ) In-Ring Tangential 1 - 3 (g) Angular Acceleration (rad.s In-Ring Tangential 1 - 3 (g) Angular Acceleration (rad.s -5 750 -5 2.0x10 750 2.0x10 Differential Differential 0.0 0 0.0 0 -5 -750 -2.0x10 -5 -750 -2.0x10 -5 -1500 -4.0x10 -5 -1500 -4.0x10 0 1 2 3 4 5 0 1 2 3 4 5 Time (s) Time (s) -5 1800 2.0x10 Above-Ring Curl Acceleration Field (g) -2 ) Angular Acceleration (rad.s Sensor Coupling Factor -5 900 1.0x10 [g.rad -1 .s 2 ] Differential -2.26 ± 0.3 × 10 -8 In-Ring (SC) 0.0 0 -1.24 ± 1 × 10 -9 In-Ring (Non-SC) -5 -900 -1.0x10 -6.06 ± 1 × 10 -9 Above-Ring (SC) -5 -1800 -2.0x10 0 1 2 3 4 5 Time (s)
Niobium Curl Measurements Niobium Curl Measurements Experiment Cooper-Pair Theoretical Prediction x2 5.00E-009 0.00E+000 2 ] In-Ring Coupling Factor [s -5.00E-009 -1.00E-008 -1.50E-008 -2.00E-008 -2.50E-008 4 6 8 10 12 14 Temperature [K] Vibration Artifact Artifact or Real or Real Effect Effect ? ? Vibration
Laser Gyroscope Gyroscope Laser Measurements Measurements
Gyroscope Facility Gyroscope Facility • Gyroscope is vibration insensitive (manufacturer quote) • Optical measurement (Sagnac, Doppler effects) • Very sensitive monitoring of the magnetic environment using Honeywell magnetoresistive sensor (HMC 1001) with 0.1 nT resolution • Weak influence of motor magnetic field found (Faraday effect on laser beam) – additional shielding with µ-Metal ⇒ 0.04 rad/s/T • Same superconductor, etc. used as in accelerometer configuration Ring Laser Gyroscope (RLG) Fiber Optic Gyroscope (FOG) Ring Laser Gyroscope (RLG) Fiber Optic Gyroscope (FOG)
Gyroscope Setup Gyroscope Setup Al or Nb Al or Nb Al Al Reference Reference Magnetic Magnetic Field Field Sensors Sensors Stainless Steel Stainless Steel Middle Middle YBCO YBCO Above Above
Gyro Measurements @ 4- -6 K 6 K Gyro Measurements @ 4 YBCO, LG 3- YBCO, LG 3 -4 4 -5 450 2.5x10 -5 2.0x10 -5 1.5x10 -1 ] 225 Angular Velocity [rad.s -1 ] -5 1.0x10 Gyro Output [rad.s -6 5.0x10 0.0 0 -6 -5.0x10 -5 -1.0x10 -225 -5 -1.5x10 -5 -2.0x10 -5 -450 -2.5x10 0 5 10 15 20 25 Time [s] Signal can be seen – – but there is a but there is a parity violation parity violation ! ! Signal can be seen
Gyro Measurements @ 4- -6 K 6 K Gyro Measurements @ 4 -5 -5 450 450 3.0x10 3.0x10 -5 -5 2.0x10 2.0x10 -1 ] -1 ] 225 225 Angular Velocity [rad.s Angular Velocity [rad.s -1 ] -1 ] -5 -5 Gyro Output [rad.s 1.0x10 1.0x10 Gyro Output [rad.s 0.0 0 0.0 0 -5 -5 -1.0x10 -1.0x10 -225 -225 -5 -5 -2.0x10 -2.0x10 -5 -5 -450 -450 -3.0x10 -3.0x10 0 5 10 15 20 25 0 5 10 15 20 25 Time [s] Time [s] Parity Violation is independent of Gyro Orientation Parity Violation is independent of Gyro Orientation
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.