Same problem, different approach Monitor process does not query - PowerPoint PPT Presentation
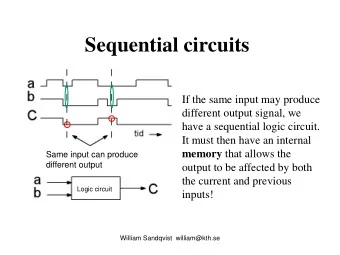
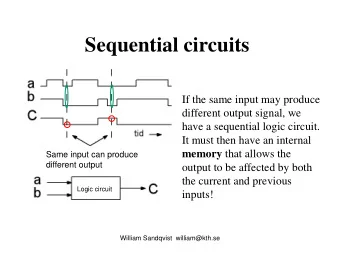
Same problem, different approach Monitor process does not query explicitly Instead, it passively collects information and uses it to build an observation. (reactive architectures, Harel and Pnueli [1985]) An observation is an ordering of event
Same problem, different approach Monitor process does not query explicitly Instead, it passively collects information and uses it to build an observation. (reactive architectures, Harel and Pnueli [1985]) An observation is an ordering of event of the distributed computation based on the order in which the receiver is notified of the events. 75
Observations: a few observations An observation puts no constraint on the order in which the monitor receives notifications p 0 e 1 1 p 1 76
Observations: a few observations An observation puts no constraint on the order in which the monitor receives notifications p 0 e 2 e 1 1 1 p 1 77
Observations: a few observations An observation puts no constraint on the order in which the monitor receives notifications p 0 e 2 e 1 1 1 p 1 78
Observations: a few observations An observation puts no constraint on the order in which the monitor receives notifications p 0 e 2 e 1 1 1 p 1 To obtain a run, messages must be delivered to the monitor in FIFO order 79
Observations: a few observations An observation puts no constraint on the order in which the monitor receives notifications p 0 e 2 e 1 1 1 p 1 To obtain a run, messages must be delivered to the monitor in FIFO order What about consistent runs? 80
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) 81
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) Causal delivery generalizes FIFO: send i ( m ) → send k ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) 82
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) Causal delivery generalizes FIFO: send i ( m ) → send k ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) p 1 send event m receive event deliver event p 2 p 3 83
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) Causal delivery generalizes FIFO: send i ( m ) → send k ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) p 1 send event m receive event deliver event p 2 p 3 84
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) Causal delivery generalizes FIFO: send i ( m ) → send k ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) p 1 send event m receive event deliver event p 2 m � p 3 85
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) Causal delivery generalizes FIFO: send i ( m ) → send k ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) p 1 send event m receive event deliver event p 2 m � p 3 1 86
Causal delivery FIFO delivery guarantees: send i ( m ) → send i ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) Causal delivery generalizes FIFO: send i ( m ) → send k ( m � ) ⇒ deliver j ( m ) → deliver j ( m � ) p 1 send event m receive event deliver event p 2 m � p 3 1 2 87
Causal Delivery in Synchronous Systems We use the upper bound on ∆ message delivery time 88
Causal Delivery in Synchronous Systems We use the upper bound on ∆ message delivery time DR1: At time , delivers all messages t p 0 it received with timestamp up to t − ∆ in increasing timestamp order 89
Causal Delivery with Lamport Clocks � DR1.1: � Deliver all received messages in � increasing (logical clock) timestamp order. 90
Causal Delivery with Lamport Clocks � DR1.1: � Deliver all received messages in � increasing (logical clock) timestamp order. 1 p 0 91
Causal Delivery with Lamport Clocks � DR1.1: � Deliver all received messages in � increasing (logical clock) timestamp order. 1 4 Should deliver? p 0 p 0 92
Causal Delivery with Lamport Clocks � DR1.1: � Deliver all received messages in � increasing (logical clock) timestamp order. 1 4 Should deliver? p 0 p 0 Problem: Lamport Clocks don’ t provide gap detection Given two events and and their clock e � e values and — where LC ( e � ) LC ( e ) LC ( e ) < LC ( e � ) determine whether some event exists s.t. e �� LC ( e ) < LC ( e �� ) < LC ( e � ) 93
Stability DR2: � Deliver all received stable messages in increasing (logical clock) timestamp order. A message received by is stable at if p p p m will never receive a future message s.t. m � TS ( m � ) < TS ( m ) 94
Implementing Stability Real-time clocks wait for time units ∆ 95
Implementing Stability Real-time clocks wait for time units ∆ Lamport clocks wait on each channel for s.t. TS ( m ) > LC ( e ) m Design better clocks! 96
Clocks and STRONG Clocks Lamport clocks implement the clock condition: e → e � ⇒ LC ( e ) < LC ( e � ) We want new clocks that implement the strong clock condition: e → e � ≡ SC ( e ) < SC ( e � ) 97
Causal Histories The causal history of an event in is the set ( H, → ) e θ ( e ) = { e � ∈ H | e � → e } ∪ { e } 98
Causal Histories The causal history of an event in is the set ( H, → ) e θ ( e ) = { e � ∈ H | e � → e } ∪ { e } e 1 e 2 e 3 e 4 e 5 1 1 1 1 1 p 1 p 2 e 1 e 2 e 3 2 2 2 p 3 e 1 e 2 e 3 e 4 3 3 3 3 99
Causal Histories The causal history of an event in is the set ( H, → ) e θ ( e ) = { e � ∈ H | e � → e } ∪ { e } e 1 e 2 e 3 e 4 e 5 1 1 1 1 1 p 1 p 2 e 1 e 2 e 3 2 2 2 p 3 e 1 e 2 e 3 e 4 3 3 3 3 e → e � ≡ θ ( e ) ⊂ θ ( e � ) 100
How to build θ ( e ) Each process : p i initializes θ := ∅ θ : if is an internal or send event, then e k i θ ( e k i ):= { e k i } ∪ θ ( e k − 1 ) i if is a receive event for message , then e k m i i } ∪ θ ( e k − 1 θ ( e k i ):= { e k ) ∪ θ ( send ( m )) i 101
Pruning causal histories Prune segments of history that are known to all processes (Peterson, Bucholz and Schlichting) Use a more clever way to encode θ ( e ) 102
Vector Clocks Consider , the projection of on θ i ( e ) θ ( e ) p i h i θ i ( e ) = h k i is a prefix of : – it can be θ i ( e ) i encoded using k i can be θ ( e ) = θ 1 ( e ) ∪ θ 2 ( e ) ∪ . . . ∪ θ n ( e ) encoded using k 1 , k 2 , . . . , k n Represent using an -vector such that θ V C n V C ( e )[ i ] = k ⇔ θ i ( e ) = h k i i 103
Update rules e i p i V C ( e i )[ i ] := V C [ i ] + 1 Message is m timestamped with m TS ( m ) = V C ( send ( m )) e i p i V C ( e i ) := max ( V C, TS ( m )) V C ( e i )[ i ] := V C [ i ] + 1 104
Example [1,0,0] [2,1,0] [5,1,2] [3,1,2] [4,1,2] p 1 [1,2,3] p 2 [0,1,0] [4,3,3] p 3 [1,0,1] [1,0,2] [1,0,3] [5,1,4] 105
Operational interpretation [1,0,0] [2,1,0] [5,1,2] [3,1,2] [4,1,2] p 1 [1,2,3] p 2 [0,1,0] [4,3,3] p 3 [1,0,1] [1,0,2] [1,0,3] [5,1,4] = V C ( e i )[ i ] = V C ( e i )[ j ] 106
Operational interpretation [1,0,0] [2,1,0] [5,1,2] [3,1,2] [4,1,2] p 1 [1,2,3] p 2 [0,1,0] [4,3,3] p 3 [1,0,1] [1,0,2] [1,0,3] [5,1,4] = no. of events executed by up to and including V C ( e i )[ i ] p i e i = V C ( e i )[ j ] 107
Operational interpretation [1,0,0] [2,1,0] [5,1,2] [3,1,2] [4,1,2] p 1 [1,2,3] p 2 [0,1,0] [4,3,3] p 3 [1,0,1] [1,0,2] [1,0,3] [5,1,4] = no. of events executed by up to and including V C ( e i )[ i ] p i e i = no. of events executed by that happen before of V C ( e i )[ j ] p j p i e i 108
VC properties: event ordering Given two vectors and , less than is defined as: V � V V < V � ≡ ( V � = V � ) ∧ ( ∀ k : 1 ≤ k ≤ n : V [ k ] ≤ V � [ k ]) Strong Clock Condition: e → e � ≡ V C ( e ) ≤ V C ( e � ) Simple Strong Clock Condition: Given of and of , where i � = j p i e j p j e i e i → e j ≡ V C ( e i )[ i ] ≤ V C ( e j )[ i ] Concurrency Given of and of , where i � = j p i e j p j e i e i � e j ≡ ( V C ( e i )[ i ] > V C ( e j )[ i ]) ∧ ( V C ( e j )[ j ] > V C ( e i )[ j ]) 109
VC properties: consistency Pairwise inconsistency Events of and of are pairwise ( i � = j ) e i p i e j p j inconsistent (i.e. can’t be on the frontier of the same consistent cut) if and only if ( VC ( e i )[ i ] < VC ( e j )[ i ]) ∨ ( VC ( e j )[ j ] < VC ( e i )[ j ]) Consistent Cut A cut defined by is consistent if and ( c 1 , . . . , c n ) only if i )[ i ] ≥ VC ( e c j ∀ i, j : 1 ≤ i ≤ n, 1 ≤ j ≤ n : ( VC ( e c i j )[ i ]) 110
VC properties: weak gap detection Weak gap detection Given of and of , if VC ( e i )[ k ] < VC ( e j )[ k ] p i e i e j p j for some , then there exists s.t k � = j e k ¬ ( e k → e i ) ∧ ( e k → e j ) [2,0,1] p i [2,2,2] p j p k [0,0,2] 111
VC properties: weak gap detection Weak gap detection Given of and of , if VC ( e i )[ k ] < VC ( e j )[ k ] p i e i e j p j for some , then there exists s.t k � = j e k ¬ ( e k → e i ) ∧ ( e k → e j ) [1,0,1] [2,0,1] p i [2,2,2] p j [2,1,1] p k [0,0,1] [0,0,2] 112
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.