Runge Kutta Chebyshev Method for parabolic PDEs Zheng Chen Brown - PowerPoint PPT Presentation
Introduction Properties Pros and Cons Examples References Runge Kutta Chebyshev Method for parabolic PDEs Zheng Chen Brown University April 25th, 2012 Introduction Properties Pros and Cons Examples References Overview Introduction 1
Introduction Properties Pros and Cons Examples References Runge Kutta Chebyshev Method for parabolic PDEs Zheng Chen Brown University April 25th, 2012
Introduction Properties Pros and Cons Examples References Overview Introduction 1 Properties 2 Consistency conditions Stability Properties Integration formula Pros and Cons 3 Examples 4 References 5
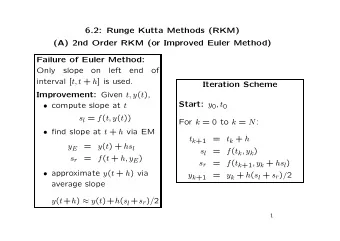
Introduction Properties Pros and Cons Examples References Introduction initial value problem for the ODE systems: u ( t ) = F ( t , u ( t )) , 0 < t � T , u ( 0 ) = u 0 ˙ (1) which originate from spatial discretization of parabolic PDEs. Restrictions: The eigenvalues of the Jacobian matrix should lie in a narrow strip along the negative axis of the complex plane Example:
Introduction Properties Pros and Cons Examples References Introduction initial value problem for the ODE systems: u ( t ) = F ( t , u ( t )) , 0 < t � T , u ( 0 ) = u 0 ˙ (1) which originate from spatial discretization of parabolic PDEs. Restrictions: The eigenvalues of the Jacobian matrix should lie in a narrow strip along the negative axis of the complex plane Jacobian matrix should not deviate too much from a normal matrix. Example:
Introduction Properties Pros and Cons Examples References Introduction initial value problem for the ODE systems: u ( t ) = F ( t , u ( t )) , 0 < t � T , u ( 0 ) = u 0 ˙ (1) which originate from spatial discretization of parabolic PDEs. Restrictions: The eigenvalues of the Jacobian matrix should lie in a narrow strip along the negative axis of the complex plane Jacobian matrix should not deviate too much from a normal matrix. Example: model heat equation u ( t ) = ∆u ˙ (2)
Introduction Properties Pros and Cons Examples References Introduction initial value problem for the ODE systems: u ( t ) = F ( t , u ( t )) , 0 < t � T , u ( 0 ) = u 0 ˙ (1) which originate from spatial discretization of parabolic PDEs. Restrictions: The eigenvalues of the Jacobian matrix should lie in a narrow strip along the negative axis of the complex plane Jacobian matrix should not deviate too much from a normal matrix. Example: model heat equation u ( t ) = ∆u ˙ (2) reaction-di ff usion problem u ( t ) = ǫ∆u + f ( u , x , t ) , 0 < ǫ ≪ 1 ˙ (3)
Introduction Properties Pros and Cons Examples References Introduction Sti ff problems: standard explicit RK methods: easy application, restrictive time-step for stability
Introduction Properties Pros and Cons Examples References Introduction Sti ff problems: standard explicit RK methods: easy application, restrictive time-step for stability implicit RK methods: expensive to implement, unconditionally stable
Introduction Properties Pros and Cons Examples References Introduction Sti ff problems: standard explicit RK methods: easy application, restrictive time-step for stability implicit RK methods: expensive to implement, unconditionally stable RKC methods: explicit, considerable time-step restriction extended real stability interval with a length β ∝ s 2
Introduction Properties Pros and Cons Examples References RKC formula Y 0 = U n , (4) Y 1 = Y 0 + ˜ µ 1 τF 0 , (5) Y j = µ j Y j − 1 + ν j Y j − 2 + ( 1 − µ j − ν j ) Y 0 (6) + ˜ µ j τF j − 1 + ˜ γ j τF 0 ( 2 � j � s ) , (7) U n + 1 = Y s , n = 0, 1, . . . , (8) This can be rewritten in the standard RK form: j − 1 � Y j = U n + τ a jl F ( t n + c l τ , Y l ) , ( 0 � j � s ) (9) l = 0 where F j = F ( t n + c j τ , Y j ) , c j are defined by: c 0 = 0, (10) c 1 = ˜ µ 1 , (11) c j = µ j c j − 1 + ν j c j − 2 + ˜ µ j + ˜ γ j , ( 2 � j � s ) (12)
Introduction Properties Pros and Cons Examples References Outline Introduction 1 Properties 2 Consistency conditions Stability Properties Integration formula Pros and Cons 3 Examples 4 References 5
Introduction Properties Pros and Cons Examples References Consistency conditions Suppose U n = U ( t n ) , where U ( t ) , t � t n is a su ffi ciently smooth solution. All Y j satisfy an expansion Y j = U ( t n ) + c j τ ˙ U ( t n ) + X j τ 2 U ( 2 ) ( t n ) + O ( τ 3 ) (13) Substitute this into the RKC formula, we have X 0 = X 1 = 0, (14) X j = µ j X j − 1 + ν j X j − 2 + ˜ µ j c j − 1 ( 2 � j � s ) (15)
Introduction Properties Pros and Cons Examples References Consistency conditions consistent of order 1: if c s = 1. (16)
Introduction Properties Pros and Cons Examples References Consistency conditions consistent of order 1: if c s = 1. (16) consistent of order 2: if c 2 2 = 2˜ µ 2 c 1 , (17) c 2 3 = µ 3 c 2 2 + 2˜ µ 2 c 2 , (18) c 2 j = µ j c 2 j − 1 + ν j c 2 j − 2 + 2˜ µ j c j − 1 ( 4 � j � s ) (19)
Introduction Properties Pros and Cons Examples References Outline Introduction 1 Properties 2 Consistency conditions Stability Properties Integration formula Pros and Cons 3 Examples 4 References 5
Introduction Properties Pros and Cons Examples References Stability function Scalar test equation: ˙ U ( t ) = λU ( t ) (20) U n + 1 = P s ( z ) U n , z = τλ (21)
Introduction Properties Pros and Cons Examples References Stability function Scalar test equation: ˙ U ( t ) = λU ( t ) (20) U n + 1 = P s ( z ) U n , z = τλ (21) P s is defined recursively: P 0 ( z ) = 1, (22) P 1 ( z ) = 1 + ˜ µ 1 z , (23) P j ( z ) = ( 1 − µ j − ν j ) + ˜ γ j z + ( µ j + ˜ µ j z ) P j − 1 ( z ) + ν j P j − 2 ( z ) ( 2 � (24)
Introduction Properties Pros and Cons Examples References Stability function Scalar test equation: ˙ U ( t ) = λU ( t ) (20) U n + 1 = P s ( z ) U n , z = τλ (21) P s is defined recursively: P 0 ( z ) = 1, (22) P 1 ( z ) = 1 + ˜ µ 1 z , (23) P j ( z ) = ( 1 − µ j − ν j ) + ˜ γ j z + ( µ j + ˜ µ j z ) P j − 1 ( z ) + ν j P j − 2 ( z ) ( 2 � (24) for each stage, we have U j = P j ( z ) U n , ( 0 � j � s ) (25)
Introduction Properties Pros and Cons Examples References Stability boundary According to the consistency condition, P j ( z ) approximates e c j z for z → 0 as P j = 1 + c j z + X j z 2 + O ( z 3 ) . (26) The choice of the stability function P j ( z ) is the cental issue in developing the RKC methods. Stability Region S = { z ∈ C : | P s | � 1 } Design rules:
Introduction Properties Pros and Cons Examples References Stability boundary According to the consistency condition, P j ( z ) approximates e c j z for z → 0 as P j = 1 + c j z + X j z 2 + O ( z 3 ) . (26) The choice of the stability function P j ( z ) is the cental issue in developing the RKC methods. Stability Region S = { z ∈ C : | P s | � 1 } Stability Boundary β ( s ) = max { − z : z � 0, | P s | � 1 } Design rules:
Introduction Properties Pros and Cons Examples References Stability boundary According to the consistency condition, P j ( z ) approximates e c j z for z → 0 as P j = 1 + c j z + X j z 2 + O ( z 3 ) . (26) The choice of the stability function P j ( z ) is the cental issue in developing the RKC methods. Stability Region S = { z ∈ C : | P s | � 1 } Stability Boundary β ( s ) = max { − z : z � 0, | P s | � 1 } Design rules: β ( s ) is as large as possible
Introduction Properties Pros and Cons Examples References Stability boundary According to the consistency condition, P j ( z ) approximates e c j z for z → 0 as P j = 1 + c j z + X j z 2 + O ( z 3 ) . (26) The choice of the stability function P j ( z ) is the cental issue in developing the RKC methods. Stability Region S = { z ∈ C : | P s | � 1 } Stability Boundary β ( s ) = max { − z : z � 0, | P s | � 1 } Design rules: β ( s ) is as large as possible all coe ffi cients must be known in analytic form
Introduction Properties Pros and Cons Examples References Outline Introduction 1 Properties 2 Consistency conditions Stability Properties Integration formula Pros and Cons 3 Examples 4 References 5
Introduction Properties Pros and Cons Examples References shifted Chebyshev polynomials Chebyshev polynomial of the first kind T s ( x ) = cos ( sarccosx ) , − 1 � x � 1 (27) Eg: for the 1st order consistent polys, the shifted Chebyshev poly P s ( z ) = T s ( 1 + z s 2 ) , − β ( s ) � z � 0 (28) yields the largest value: β ( s ) = 2 s 2 . From the three-terms recursion formula for Chebyshev polynomials, we get: P 0 ( z ) = 1, P 1 ( z ) = 1 + z s 2 , P j ( z ) = 2 ( 1 + z s 2 ) P j − 1 ( z )− P j − 2 ( z ) , j � 2, (29) which gives the analytical form of the integration coe ff s µ 1 = 1 /s 2 , µ j = 2, ˜ µ j = 2 /s 2 , ν j = − 1, ˜ ˜ γ j = 0, 0 � j � s (30)
Introduction Properties Pros and Cons Examples References 1st order case: RKC1 For 1st and 2nd order RKC, we have this general form P j ( z ) = a j + b j T j ( w 0 + w 1 z ) , 0 � j � s (31) RKC1: ( w 0 ) , w 0 = 1 + ǫ s 2 , w 1 = T s ( w 0 ) a j = 0, b j = T − 1 s ( w 0 ) , ( 0 � j � s ) j T ′ (32) Therefore, β ( s ) ≃ ( w 0 + 1 ) T ′ s ( w 0 ) ≃ ( 2 − 4 ǫ 3 ) s 2 , ǫ → 0 (33) T s ( w 0 ) choose ǫ = 0.05, then β ( s ) = 1.90 s 2 .
Recommend
![Bounds on Deviation by Markov: Chebyshev Bound E[(R -) 2 ] x 2 variance of R chebyshev.1](https://c.sambuz.com/1006060/bounds-on-deviation-s.webp)







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.