Design of optimal Runge-Kutta methods David I. Ketcheson King - PowerPoint PPT Presentation
Design of optimal Runge-Kutta methods David I. Ketcheson King Abdullah University of Science & Technology (KAUST) D. Ketcheson (KAUST) 1 / 36 Acknowledgments Some parts of this are joint work with: Aron Ahmadia Matteo Parsani D.
Design of optimal Runge-Kutta methods David I. Ketcheson King Abdullah University of Science & Technology (KAUST) D. Ketcheson (KAUST) 1 / 36
Acknowledgments Some parts of this are joint work with: Aron Ahmadia Matteo Parsani D. Ketcheson (KAUST) 2 / 36
Outline High order Runge-Kutta methods 1 Linear properties of Runge-Kutta methods 2 Nonlinear properties of Runge-Kutta methods 3 Putting it all together: some optimal methods and applications 4 D. Ketcheson (KAUST) 3 / 36
Outline High order Runge-Kutta methods 1 Linear properties of Runge-Kutta methods 2 Nonlinear properties of Runge-Kutta methods 3 Putting it all together: some optimal methods and applications 4 D. Ketcheson (KAUST) 4 / 36
Solution of hyperbolic PDEs The fundamental algorithmic barrier is the CFL condition: ∆ t ≤ a ∆ x Implicit methods don’t usually help (due to reduced accuracy) D. Ketcheson (KAUST) 5 / 36
Solution of hyperbolic PDEs The fundamental algorithmic barrier is the CFL condition: ∆ t ≤ a ∆ x Implicit methods don’t usually help (due to reduced accuracy) Strong scaling limits the effectiveness of spatial parallelism alone D. Ketcheson (KAUST) 5 / 36
Solution of hyperbolic PDEs The fundamental algorithmic barrier is the CFL condition: ∆ t ≤ a ∆ x Implicit methods don’t usually help (due to reduced accuracy) Strong scaling limits the effectiveness of spatial parallelism alone Strategy: keep ∆ x as large as possible by using high order methods D. Ketcheson (KAUST) 5 / 36
Solution of hyperbolic PDEs The fundamental algorithmic barrier is the CFL condition: ∆ t ≤ a ∆ x Implicit methods don’t usually help (due to reduced accuracy) Strong scaling limits the effectiveness of spatial parallelism alone Strategy: keep ∆ x as large as possible by using high order methods But: high order methods cost more and require more memory D. Ketcheson (KAUST) 5 / 36
Solution of hyperbolic PDEs The fundamental algorithmic barrier is the CFL condition: ∆ t ≤ a ∆ x Implicit methods don’t usually help (due to reduced accuracy) Strong scaling limits the effectiveness of spatial parallelism alone Strategy: keep ∆ x as large as possible by using high order methods But: high order methods cost more and require more memory Can we develop high order methods that are as efficient as lower order methods? D. Ketcheson (KAUST) 5 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. D. Ketcheson (KAUST) 6 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. Using a different time integrator can: Reduce the number of RHS evaluations required D. Ketcheson (KAUST) 6 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. Using a different time integrator can: Reduce the number of RHS evaluations required Alleviate timestep resrictions due to D. Ketcheson (KAUST) 6 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. Using a different time integrator can: Reduce the number of RHS evaluations required Alleviate timestep resrictions due to Linear stability D. Ketcheson (KAUST) 6 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. Using a different time integrator can: Reduce the number of RHS evaluations required Alleviate timestep resrictions due to Linear stability Nonlinear stability D. Ketcheson (KAUST) 6 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. Using a different time integrator can: Reduce the number of RHS evaluations required Alleviate timestep resrictions due to Linear stability Nonlinear stability Improve accuracy (truncation error, dispersion, dissipation) D. Ketcheson (KAUST) 6 / 36
Time Integration Using a better time integrator is usually simple but can be highly beneficial. Using a different time integrator can: Reduce the number of RHS evaluations required Alleviate timestep resrictions due to Linear stability Nonlinear stability Improve accuracy (truncation error, dispersion, dissipation) Reduce storage requirements D. Ketcheson (KAUST) 6 / 36
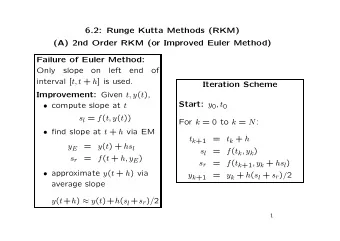
Runge-Kutta Methods To solve the initial value problem: u (0) = u 0 u ′ ( t ) = F ( u ( t )) , a Runge-Kutta method computes approximations u n ≈ u ( n ∆ t ): i − 1 y i = u n + ∆ t � a ij F ( y j ) j =1 s − 1 u n +1 = u n + ∆ t � b j F ( y j ) j =1 The accuracy and stability of the method depend on the coefficient matrix A and vector b . D. Ketcheson (KAUST) 7 / 36
Runge-Kutta Methods: a philosophical aside An RK method builds up information about the solution derivatives through the computation of intermediate stages At the end of a step all of this information is thrown away! Use more stages = ⇒ keep information around longer D. Ketcheson (KAUST) 8 / 36
Outline High order Runge-Kutta methods 1 Linear properties of Runge-Kutta methods 2 Nonlinear properties of Runge-Kutta methods 3 Putting it all together: some optimal methods and applications 4 D. Ketcheson (KAUST) 9 / 36
The Stability Function For the linear equation u ′ = λ u , a Runge-Kutta method yields a solution u n +1 = φ ( λ ∆ t ) u n , where φ is called the stability function of the method: φ ( z ) = det( I − z ( A − eb T ) det( I − z A ) D. Ketcheson (KAUST) 10 / 36
The Stability Function For the linear equation u ′ = λ u , a Runge-Kutta method yields a solution u n +1 = φ ( λ ∆ t ) u n , where φ is called the stability function of the method: φ ( z ) = det( I − z ( A − eb T ) det( I − z A ) Example: Euler’s Method u n +1 = u n + ∆ tF ( u ); φ ( z ) = 1 + z . D. Ketcheson (KAUST) 10 / 36
The Stability Function For the linear equation u ′ = λ u , a Runge-Kutta method yields a solution u n +1 = φ ( λ ∆ t ) u n , where φ is called the stability function of the method: φ ( z ) = det( I − z ( A − eb T ) det( I − z A ) Example: Euler’s Method u n +1 = u n + ∆ tF ( u ); φ ( z ) = 1 + z . For explicit methods of order p : p s 1 j ! z j + � � α j z j . φ ( z ) = j =0 j = p +1 D. Ketcheson (KAUST) 10 / 36
Absolute Stability For the linear equation u ′ ( t ) = Lu we say the solution is absolutely stable if | φ ( λ ∆ t ) | ≤ 1 for all λ ∈ σ ( L ). D. Ketcheson (KAUST) 11 / 36
Absolute Stability For the linear equation u ′ ( t ) = Lu we say the solution is absolutely stable if | φ ( λ ∆ t ) | ≤ 1 for all λ ∈ σ ( L ). Example: Euler’s Method u n +1 = u n + ∆ tF ( u ); φ ( z ) = 1 + z . − 1 D. Ketcheson (KAUST) 11 / 36
Stability optimization This leads naturally to the following problem. Stability optimization Given L , p , s , maximize ∆ t subject to | φ (∆ t λ ) | − 1 ≤ 0 , λ ∈ σ ( L ) , p s 1 j ! z j + � � α j z j . where φ ( z ) = j =0 j = p +1 Here the decision variables are ∆ t and the coefficients α j , j = p + 1 , . . . , s . This problem is quite difficult; we approximate its solution by solving a sequence of convex problems (DK & A. Ahmadia, arXiv preprint). D. Ketcheson (KAUST) 12 / 36
Accuracy optimization We could instead optimize accuracy over some region in C : Accuracy optimization Given L , p , s , maximize ∆ t subject to | φ (∆ t λ ) − exp(∆ t λ | ≤ ǫ, λ ∈ σ ( L ) , p s 1 j ! z j + � � α j z j . where φ ( z ) = j =0 j = p +1 In the PDE case, we can replace exp(∆ t λ ) with the exact dispersion relation for each Fourier mode. D. Ketcheson (KAUST) 13 / 36
Stability Optimization: a toy example As an example, consider the advection equation u t + u x = 0 discretized in space by first-order upwind differencing with unit spatial mesh size U ′ i ( t ) = − ( U i ( t ) − U i − 1 ( t )) with periodic boundary condition U 0 ( t ) = U N ( t ). 8 6 4 2 0 2 4 6 8 4 3 2 10 1 D. Ketcheson (KAUST) 14 / 36
Stability Optimization: a toy example 8 8 6 6 4 4 2 2 0 0 2 2 4 4 6 6 8 8 4 3 2 10 1 14 4 12 10 8 6 2 0 (a) RK(4,4) (b) Optimized 10-stage method D. Ketcheson (KAUST) 15 / 36
Stability Optimization: a toy example What is the relative efficiency? Stable step size Cost per step RK(4,4): 1 . 4 4 ≈ 0 . 35 6 RK(10,4): 10 = 0 . 6 By allowing even more stages, can asymptotically approach the efficiency of Euler’s method. D. Ketcheson (KAUST) 16 / 36
Stability Optimization: a more interesting example Second order discontinuous Galerkin discretization of advection: D. Ketcheson (KAUST) 17 / 36
Stability Optimization: one more example 20 15 10 5 0 5 10 15 20 80 70 60 50 40 30 20 10 0 s = 20 D. Ketcheson (KAUST) 18 / 36
Stability Optimization: one more example s = 20 D. Ketcheson (KAUST) 18 / 36
Stability Optimization: one more example s = 20 D. Ketcheson (KAUST) 18 / 36
Outline High order Runge-Kutta methods 1 Linear properties of Runge-Kutta methods 2 Nonlinear properties of Runge-Kutta methods 3 Putting it all together: some optimal methods and applications 4 D. Ketcheson (KAUST) 19 / 36
Recommend


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.