
Reduced Basis Methods for Option Pricing page 1/54 Reduced Basis - PowerPoint PPT Presentation
Karsten Urban Reduced Basis Methods for Option Pricing page 1/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Acknowledgements joint work with / contributions from Silke Glas, Antonia Mayerhofer,
page 8/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Parabolic PDEs / Space-Time variational formulation ◮ V := H 1 → V ′ , I := ( 0 , T ) 0 ( D ) , H := L 2 ( D ) , V ֒ → H ֒ ◮ � ˙ u ( t ) , z ( t ) � V ′ × V + a ( u ( t ) , z ( t )) = � g ( t ) , z ( t ) � V ′ × V ∀ v ( t ) ∈ V , t ∈ I ( a . e . ) ∀ ζ ∈ H ( u ( 0 ) , ζ ) H = ( u 0 , ζ ) H ◮ Integrate over time � Trial space: L 2 ( I ; V ) := � ◮ Z := L 2 ( I ; V ) := { w : I → V : � w � 2 I � w ( t ) � 2 V dt < ∞} (Bochner space) → C (¯ ◮ X := { w ∈ Z : ˙ w ∈ Z ′ } = L 2 ( I ; V ) ∩ H 1 ( I ; V ′ ) ֒ I ; H ) ◮ � w � 2 X := � w � 2 w � 2 Z ′ + � w ( T ) � 2 Z + � ˙ H ◮ Include also initial condition � Test space: ◮ Y = Z × H , � v � 2 Y := � z � 2 Z + � ζ � 2 H for v = ( z , ζ ) in Y � � b ( u , v ) := � ˙ u ( t ) , z ( t ) � V ′ × V dt + a ( u ( t ) , z ( t )) dt + ( u ( 0 ) , ζ ) H I I = b 1 ( w , z ) + ( u ( 0 ) , ζ ) H � � g ( t ) , z ( t ) � V ′ × V dt + ( µ 0 , ζ ) H =: g 1 ( z ) + ( u 0 , ζ ) H f ( v ) := I Variational formulation (Petrov-Galerkin) find u ∈ X s.t. b ( u , v ) = f ( v ) ∀ v ∈ Y .
page 9/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Parabolic PPDEs / Space-Time variational formulation ◮ V := H 1 → V ′ , I := ( 0 , T ) 0 ( D ) , H := L 2 ( D ) , V ֒ → H ֒ ◮ � ˙ u ( t ) , φ � V ′ × V + a ( µ 1 , u ( t ) , φ ) = � g ( µ 1 ; t ) , φ � V ′ × V ∀ t ∈ I ( a . e . ) u ( 0 ) = µ 0 ◮ Integrate over time � Trial space: L 2 ( I ; V ) := � ◮ Z := L 2 ( I ; V ) := { w : I → V : � w � 2 I � w ( t ) � 2 V dt < ∞} (Bochner space) ◮ X := { w ∈ Z : ˙ w ∈ Z ′ } = L 2 ( I ; V ) ∩ H 1 ( I ; V ′ ) ֒ → C ( I ; H ) ◮ � w � 2 X := � w � 2 w � 2 Z ′ + � w ( T ) � 2 Z + � ˙ H ◮ Include also initial condition � Test space: ◮ Y = Z × H , � v � 2 Y := � z � 2 Z + � ζ � 2 H for v = ( z , ζ ) in Y � � b ( µ 1 ; u , v ) := � ˙ u ( t ) , z ( t ) � V ′ × V dt + a ( µ 1 ; u ( t ) , z ( t )) dt + ( w ( 0 ) , ζ ) H I I = b 1 ( µ 1 ; w , z ) + ( u ( 0 ) , ζ ) H � f ( µ ; v ) := � g ( µ 1 ; t ) , z ( t ) � V ′ × V dt + ( µ 0 , ζ ) H =: g 1 ( µ 1 ; z ) + ( µ 0 , ζ ) H I Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y .
page 10/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Why space-time? Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y . b ( µ 1 ; w , v ) β := inf w ∈X sup � w � X � v � Y v ∈Y
page 10/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Why space-time? Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y . b ( µ 1 ; w , v ) β := inf w ∈X sup � w � X � v � Y v ∈Y ◮ if b ( µ 1 ; · , · ) bounded: problem well-posed ⇐ ⇒ inf-sup condition holds ( β > 0)
page 10/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Why space-time? Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y . b ( µ 1 ; w , v ) β := inf w ∈X sup � w � X � v � Y v ∈Y ◮ if b ( µ 1 ; · , · ) bounded: problem well-posed ⇐ ⇒ inf-sup condition holds ( β > 0) ◮ error/residual bound: b ( µ 1 ; u − u η , v ) f ( µ ; v ) − b ( µ 1 ; u η , v ) β � u − u η � X ≤ sup = sup = � r η ( µ ) � Y ′ � v � Y � v � Y v ∈Y v ∈Y
page 10/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Why space-time? Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y . b ( µ 1 ; w , v ) β := inf w ∈X sup � w � X � v � Y v ∈Y ◮ if b ( µ 1 ; · , · ) bounded: problem well-posed ⇐ ⇒ inf-sup condition holds ( β > 0) ◮ error/residual bound: b ( µ 1 ; u − u η , v ) f ( µ ; v ) − b ( µ 1 ; u η , v ) β � u − u η � X ≤ sup = sup = � r η ( µ ) � Y ′ � v � Y � v � Y v ∈Y v ∈Y ◮ online: solve one N × N linear system (no time-stepping)
page 10/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Why space-time? Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y . b ( µ 1 ; w , v ) β := inf w ∈X sup � w � X � v � Y v ∈Y ◮ if b ( µ 1 ; · , · ) bounded: problem well-posed ⇐ ⇒ inf-sup condition holds ( β > 0) ◮ error/residual bound: b ( µ 1 ; u − u η , v ) f ( µ ; v ) − b ( µ 1 ; u η , v ) β � u − u η � X ≤ sup = sup = � r η ( µ ) � Y ′ � v � Y � v � Y v ∈Y v ∈Y ◮ online: solve one N × N linear system (no time-stepping) ◮ ex: traveling wave is 1 snapshot
page 10/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Why space-time? Variational formulation (Petrov-Galerkin) find u ( µ ) ∈ X s.t. b ( µ 1 ; u ( µ ) , v ) = f ( µ ; v ) ∀ v ∈ Y . b ( µ 1 ; w , v ) β := inf w ∈X sup � w � X � v � Y v ∈Y ◮ if b ( µ 1 ; · , · ) bounded: problem well-posed ⇐ ⇒ inf-sup condition holds ( β > 0) ◮ error/residual bound: b ( µ 1 ; u − u η , v ) f ( µ ; v ) − b ( µ 1 ; u η , v ) β � u − u η � X ≤ sup = sup = � r η ( µ ) � Y ′ � v � Y � v � Y v ∈Y v ∈Y ◮ online: solve one N × N linear system (no time-stepping) ◮ ex: traveling wave is 1 snapshot – (offline) dimension increased by one (cpu / memory)
page 11/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Well-posedness / inf-sup-constant √ � w ( 0 ) � H � φ � V ◮ C e := sup w ∈X\{ 0 } ≤ 3, ̺ := sup 0 � = φ ∈ V ( ≤ 1 ) � w � X � φ � H
page 11/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Well-posedness / inf-sup-constant √ � w ( 0 ) � H � φ � V ◮ C e := sup w ∈X\{ 0 } ≤ 3, ̺ := sup 0 � = φ ∈ V ( ≤ 1 ) � w � X � φ � H a ( µ 1 ; φ, φ ) + λ a � φ � 2 H ≥ α a � φ � 2 ◮ a ( µ 1 ; φ, ψ ) ≤ M a � φ � V � ψ � V , V
page 11/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Well-posedness / inf-sup-constant √ � w ( 0 ) � H � φ � V ◮ C e := sup w ∈X\{ 0 } ≤ 3, ̺ := sup 0 � = φ ∈ V ( ≤ 1 ) � w � X � φ � H a ( µ 1 ; φ, φ ) + λ a � φ � 2 H ≥ α a � φ � 2 ◮ a ( µ 1 ; φ, ψ ) ≤ M a � φ � V � ψ � V , V a ( µ 1 ; ψ, φ ) ◮ β ∗ a := µ 1 ∈D 1 inf inf φ ∈ V sup > 0 � φ � V � ψ � V ψ ∈ V
page 11/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Well-posedness / inf-sup-constant √ � w ( 0 ) � H � φ � V ◮ C e := sup w ∈X\{ 0 } ≤ 3, ̺ := sup 0 � = φ ∈ V ( ≤ 1 ) � w � X � φ � H a ( µ 1 ; φ, φ ) + λ a � φ � 2 H ≥ α a � φ � 2 ◮ a ( µ 1 ; φ, ψ ) ≤ M a � φ � V � ψ � V , V a ( µ 1 ; ψ, φ ) ◮ β ∗ a := µ 1 ∈D 1 inf inf φ ∈ V sup > 0 � φ � V � ψ � V ψ ∈ V b ( µ 1 ; w , v ) ◮ we look for: β b := µ 1 ∈D 1 inf inf w ∈X sup � w � X � v � Y v ∈Y
page 11/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Well-posedness / inf-sup-constant √ � w ( 0 ) � H � φ � V ◮ C e := sup w ∈X\{ 0 } ≤ 3, ̺ := sup 0 � = φ ∈ V ( ≤ 1 ) � w � X � φ � H a ( µ 1 ; φ, φ ) + λ a � φ � 2 H ≥ α a � φ � 2 ◮ a ( µ 1 ; φ, ψ ) ≤ M a � φ � V � ψ � V , V a ( µ 1 ; ψ, φ ) ◮ β ∗ a := µ 1 ∈D 1 inf inf φ ∈ V sup > 0 � φ � V � ψ � V ψ ∈ V b ( µ 1 ; w , v ) ◮ we look for: β b := µ 1 ∈D 1 inf inf w ∈X sup � w � X � v � Y v ∈Y ◮ inf-sup bounds: coer ( α, λ, M , C ) := min { min { 1 , M − 2 } ( α − λ̺ 2 ) , 1 } β LB , � 2 max { 1 , ( β ∗ a ) − 1 } + C 2 e − 2 λ T β LB β LB time ( α, λ, M , C , T ) := coer ( α, 0 , M , C ) � max { 2 , 1 + 2 λ 2 ̺ 4 } Proposition (Inf-sup bound (Schawb/Stevenson, U./Patera) ) Let a ( · ; · , · ) be bounded (M a ) and satisfy a Garding inequality ( α a , λ a ). Then, β b ≥ β LB := max { β LB coer ( α a , λ a , M a , C e ) , β LB time ( α a , λ a , M a , C e , T ) } . b
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h ◮ FE in time: E ∆ t = { σ 1 , . . . , σ K } ⊂ H 1 { 0 } ( I ) (pw. linear) and F ∆ t ⊂ L 2 ( I ) (pw. constant) w.r.t. T time , ∆ t := { t k = k ∆ t : 0 ≤ k ≤ K , ∆ t := T K }
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h ◮ FE in time: E ∆ t = { σ 1 , . . . , σ K } ⊂ H 1 { 0 } ( I ) (pw. linear) and F ∆ t ⊂ L 2 ( I ) (pw. constant) w.r.t. T time , ∆ t := { t k = k ∆ t : 0 ≤ k ≤ K , ∆ t := T K } ◮ Discretization for initial value: ◮ trial: I L := span { ψ 1 , . . . , ψ L } ⊂ H 1 ( D ) , Ψ := { ψ i : i ∈ N } Riesz basis, 1 ≤ L ≤ ∞ ◮ test: H M = span { h 1 , . . . , h M } h m ∈ H
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h ◮ FE in time: E ∆ t = { σ 1 , . . . , σ K } ⊂ H 1 { 0 } ( I ) (pw. linear) and F ∆ t ⊂ L 2 ( I ) (pw. constant) w.r.t. T time , ∆ t := { t k = k ∆ t : 0 ≤ k ≤ K , ∆ t := T K } ◮ Discretization for initial value: ◮ trial: I L := span { ψ 1 , . . . , ψ L } ⊂ H 1 ( D ) , Ψ := { ψ i : i ∈ N } Riesz basis, 1 ≤ L ≤ ∞ ◮ test: H M = span { h 1 , . . . , h M } h m ∈ H ◮ X (∆ t , h , L ) := ( σ 0 ⊗ I L ) ⊕ ( E ∆ t ⊗ V h ) =: ( σ 0 ⊗ I L ) ⊕ W δ
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h ◮ FE in time: E ∆ t = { σ 1 , . . . , σ K } ⊂ H 1 { 0 } ( I ) (pw. linear) and F ∆ t ⊂ L 2 ( I ) (pw. constant) w.r.t. T time , ∆ t := { t k = k ∆ t : 0 ≤ k ≤ K , ∆ t := T K } ◮ Discretization for initial value: ◮ trial: I L := span { ψ 1 , . . . , ψ L } ⊂ H 1 ( D ) , Ψ := { ψ i : i ∈ N } Riesz basis, 1 ≤ L ≤ ∞ ◮ test: H M = span { h 1 , . . . , h M } h m ∈ H ◮ X (∆ t , h , L ) := ( σ 0 ⊗ I L ) ⊕ ( E ∆ t ⊗ V h ) =: ( σ 0 ⊗ I L ) ⊕ W δ ◮ Y (∆ t , h , M ) = F ∆ t ⊗ V h × H M =: Z δ × H M , δ = (∆ t , h ) , η := ( δ, M )
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h ◮ FE in time: E ∆ t = { σ 1 , . . . , σ K } ⊂ H 1 { 0 } ( I ) (pw. linear) and F ∆ t ⊂ L 2 ( I ) (pw. constant) w.r.t. T time , ∆ t := { t k = k ∆ t : 0 ≤ k ≤ K , ∆ t := T K } ◮ Discretization for initial value: ◮ trial: I L := span { ψ 1 , . . . , ψ L } ⊂ H 1 ( D ) , Ψ := { ψ i : i ∈ N } Riesz basis, 1 ≤ L ≤ ∞ ◮ test: H M = span { h 1 , . . . , h M } h m ∈ H ◮ X (∆ t , h , L ) := ( σ 0 ⊗ I L ) ⊕ ( E ∆ t ⊗ V h ) =: ( σ 0 ⊗ I L ) ⊕ W δ ◮ Y (∆ t , h , M ) = F ∆ t ⊗ V h × H M =: Z δ × H M , δ = (∆ t , h ) , η := ( δ, M ) Crank-Nicolson scheme M ) T u 0 N init M ( N init η ( µ ) = P M c ( µ 0 ) , (1a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (1b) η δ δ
page 12/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Discretization ◮ Note: trial and test spaces are tensor products : ◮ X = H 1 ( I ) ⊗ V Y = Z × H := L 2 ( I ; V ) × H = ( L 2 ( I ) ⊗ V ) × H ◮ FE in space: V h := span { φ 1 , . . . , φ n h } w.r.t. T space , h ◮ FE in time: E ∆ t = { σ 1 , . . . , σ K } ⊂ H 1 { 0 } ( I ) (pw. linear) and F ∆ t ⊂ L 2 ( I ) (pw. constant) w.r.t. T time , ∆ t := { t k = k ∆ t : 0 ≤ k ≤ K , ∆ t := T K } ◮ Discretization for initial value: ◮ trial: I L := span { ψ 1 , . . . , ψ L } ⊂ H 1 ( D ) , Ψ := { ψ i : i ∈ N } Riesz basis, 1 ≤ L ≤ ∞ ◮ test: H M = span { h 1 , . . . , h M } h m ∈ H ◮ X (∆ t , h , L ) := ( σ 0 ⊗ I L ) ⊕ ( E ∆ t ⊗ V h ) =: ( σ 0 ⊗ I L ) ⊕ W δ ◮ Y (∆ t , h , M ) = F ∆ t ⊗ V h × H M =: Z δ × H M , δ = (∆ t , h ) , η := ( δ, M ) Crank-Nicolson scheme M ) T u 0 N init M ( N init η ( µ ) = P M c ( µ 0 ) , (1a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (1b) η δ δ ⊗ M space ⊗ A space ◮ note: B δ ( µ 1 ) := N time + M time ( µ 1 ) ∈ R Kn h × Kn h ∆ t ∆ t h h
page 13/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Offline computations (Mayerhofer, U.) Crank-Nicolson scheme N init M ( N init M ) T u 0 η ( µ ) = P M c ( µ 0 ) , (2a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (2b) η δ δ
page 13/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Offline computations (Mayerhofer, U.) Crank-Nicolson scheme N init M ( N init M ) T u 0 η ( µ ) = P M c ( µ 0 ) , (2a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (2b) η δ δ ˘ X δ := { w δ ∈ X δ : w δ ( 0 ) = 0 } (homogeneous initial conditions) ◮
page 13/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Offline computations (Mayerhofer, U.) Crank-Nicolson scheme N init M ( N init M ) T u 0 η ( µ ) = P M c ( µ 0 ) , (2a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (2b) η δ δ ˘ X δ := { w δ ∈ X δ : w δ ( 0 ) = 0 } (homogeneous initial conditions) ◮ Two step offline computation u 0 , 0 ( u 0 , 0 η ( µ 0 ) ∈ I M : η ( µ 0 ) , ζ M ) H = ( µ 0 , ζ M ) H ∀ ζ M ∈ H M , (3) u η ( µ ) , z δ ) = ˘ u η ( µ ) ∈ ˘ f ( u 0 ˘ X δ : b 1 ( µ 1 ; ˘ η ( µ 0 ) , µ 1 ; z δ ) ∀ z δ ∈ Z δ , (4) η ( µ 0 ) := σ 0 ⊗ u 0 , 0 η ( µ 0 ) , ˘ ◮ u 0 f appropriate
page 13/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Offline computations (Mayerhofer, U.) Crank-Nicolson scheme N init M ( N init M ) T u 0 η ( µ ) = P M c ( µ 0 ) , (2a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (2b) η δ δ ˘ X δ := { w δ ∈ X δ : w δ ( 0 ) = 0 } (homogeneous initial conditions) ◮ Two step offline computation u 0 , 0 ( u 0 , 0 η ( µ 0 ) ∈ I M : η ( µ 0 ) , ζ M ) H = ( µ 0 , ζ M ) H ∀ ζ M ∈ H M , (3) u η ( µ ) , z δ ) = ˘ u η ( µ ) ∈ ˘ f ( u 0 ˘ X δ : b 1 ( µ 1 ; ˘ η ( µ 0 ) , µ 1 ; z δ ) ∀ z δ ∈ Z δ , (4) η ( µ 0 ) := σ 0 ⊗ u 0 , 0 η ( µ 0 ) , ˘ ◮ u 0 f appropriate ◮ solve (4) e.g. by Crank-Nicolson or by tensor techniques for B δ ( µ 1 )
page 13/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Offline computations (Mayerhofer, U.) Crank-Nicolson scheme N init M ( N init M ) T u 0 η ( µ ) = P M c ( µ 0 ) , (2a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (2b) η δ δ ˘ X δ := { w δ ∈ X δ : w δ ( 0 ) = 0 } (homogeneous initial conditions) ◮ Two step offline computation u 0 , 0 ( u 0 , 0 η ( µ 0 ) ∈ I M : η ( µ 0 ) , ζ M ) H = ( µ 0 , ζ M ) H ∀ ζ M ∈ H M , (3) u η ( µ ) , z δ ) = ˘ u η ( µ ) ∈ ˘ f ( u 0 ˘ X δ : b 1 ( µ 1 ; ˘ η ( µ 0 ) , µ 1 ; z δ ) ∀ z δ ∈ Z δ , (4) η ( µ 0 ) := σ 0 ⊗ u 0 , 0 η ( µ 0 ) , ˘ ◮ u 0 f appropriate ◮ solve (4) e.g. by Crank-Nicolson or by tensor techniques for B δ ( µ 1 ) ◮ inf-sup-stability (U., Patera) � error/residual estimator
page 13/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Offline computations (Mayerhofer, U.) Crank-Nicolson scheme N init M ( N init M ) T u 0 η ( µ ) = P M c ( µ 0 ) , (2a) 1 ( µ )) + A ℓ ( µ 1 ) u ℓ − 1 / 2 ( µ ) = g ℓ − 1 / 2 ∆ t M ℓ ( u ℓ η ( µ ) − u ℓ − 1 ( µ 1 ) , ℓ ≥ 1 . (2b) η δ δ ˘ X δ := { w δ ∈ X δ : w δ ( 0 ) = 0 } (homogeneous initial conditions) ◮ Two step offline computation u 0 , 0 ( u 0 , 0 η ( µ 0 ) ∈ I M : η ( µ 0 ) , ζ M ) H = ( µ 0 , ζ M ) H ∀ ζ M ∈ H M , (3) u η ( µ ) , z δ ) = ˘ u η ( µ ) ∈ ˘ f ( u 0 ˘ X δ : b 1 ( µ 1 ; ˘ η ( µ 0 ) , µ 1 ; z δ ) ∀ z δ ∈ Z δ , (4) η ( µ 0 ) := σ 0 ⊗ u 0 , 0 η ( µ 0 ) , ˘ ◮ u 0 f appropriate ◮ solve (4) e.g. by Crank-Nicolson or by tensor techniques for B δ ( µ 1 ) ◮ inf-sup-stability (U., Patera) � error/residual estimator ◮ stabilization or by stabilizer, double Greedy, ... (Andreev; Rozza et al, Dahmen, Welper, ...)
page 14/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 1/3 ◮ choose X N ⊂ X η by snapshots (Greedy, nonlinear approximation)
page 14/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 1/3 ◮ choose X N ⊂ X η by snapshots (Greedy, nonlinear approximation) ◮ given µ = ( µ 0 , µ 1 ) ∈ D ; choose stable Y N ( µ ) (e.g. by stabilizer) u N ( µ ) ∈ X N : b ( µ 1 ; u N ( µ ) , v N ) = f ( µ ; v N ) ∀ v N ∈ Y N ( µ ) . (5)
page 14/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 1/3 ◮ choose X N ⊂ X η by snapshots (Greedy, nonlinear approximation) ◮ given µ = ( µ 0 , µ 1 ) ∈ D ; choose stable Y N ( µ ) (e.g. by stabilizer) u N ( µ ) ∈ X N : b ( µ 1 ; u N ( µ ) , v N ) = f ( µ ; v N ) ∀ v N ∈ Y N ( µ ) . (5) ◮ residual for v = ( z , ζ ) ∈ Y : r N ( µ ; v ) = f ( µ ; v ) − b ( µ ; u N ( µ ) , v ) = g 1 ( µ 1 ; z ) − b 1 ( µ 1 ; u N ( µ ) , z ) + ( µ 0 − ( u N ( µ ))( 0 ) , ζ ) H =: r N , 1 ( µ ; z ) + r N , 0 ( µ ; ζ ) ,
page 14/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 1/3 ◮ choose X N ⊂ X η by snapshots (Greedy, nonlinear approximation) ◮ given µ = ( µ 0 , µ 1 ) ∈ D ; choose stable Y N ( µ ) (e.g. by stabilizer) u N ( µ ) ∈ X N : b ( µ 1 ; u N ( µ ) , v N ) = f ( µ ; v N ) ∀ v N ∈ Y N ( µ ) . (5) ◮ residual for v = ( z , ζ ) ∈ Y : r N ( µ ; v ) = f ( µ ; v ) − b ( µ ; u N ( µ ) , v ) = g 1 ( µ 1 ; z ) − b 1 ( µ 1 ; u N ( µ ) , z ) + ( µ 0 − ( u N ( µ ))( 0 ) , ζ ) H =: r N , 1 ( µ ; z ) + r N , 0 ( µ ; ζ ) , ◮ Idea: setup a two-stage RBM similar to offline
page 14/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 1/3 ◮ choose X N ⊂ X η by snapshots (Greedy, nonlinear approximation) ◮ given µ = ( µ 0 , µ 1 ) ∈ D ; choose stable Y N ( µ ) (e.g. by stabilizer) u N ( µ ) ∈ X N : b ( µ 1 ; u N ( µ ) , v N ) = f ( µ ; v N ) ∀ v N ∈ Y N ( µ ) . (5) ◮ residual for v = ( z , ζ ) ∈ Y : r N ( µ ; v ) = f ( µ ; v ) − b ( µ ; u N ( µ ) , v ) = g 1 ( µ 1 ; z ) − b 1 ( µ 1 ; u N ( µ ) , z ) + ( µ 0 − ( u N ( µ ))( 0 ) , ζ ) H =: r N , 1 ( µ ; z ) + r N , 0 ( µ ; ζ ) , ◮ Idea: setup a two-stage RBM similar to offline ◮ Recall: (5) won’t be time-marching! ◮ no sum up of time-discrete residuals ◮ but: space-time
page 15/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 2/3 1st step: Initial condiition ◮ construct I N 0 ⊂ I M ⊂ H of (small) dimension N 0 by snapshots S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , I N 0 := span { S 0 N 0 }
page 15/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 2/3 1st step: Initial condiition ◮ construct I N 0 ⊂ I M ⊂ H of (small) dimension N 0 by snapshots S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , I N 0 := span { S 0 N 0 } ◮ RB-approximation u 0 , 0 N ( µ 0 ) ∈ I N 0 for new µ 0 : ( u 0 , 0 ∀ ζ N ∈ H N 0 := span { h 1 N 0 , . . . , h N 0 N ( µ 0 ) , ζ N ) H = ( µ 0 , ζ N ) H N 0 }
page 15/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 2/3 1st step: Initial condiition ◮ construct I N 0 ⊂ I M ⊂ H of (small) dimension N 0 by snapshots S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , I N 0 := span { S 0 N 0 } ◮ RB-approximation u 0 , 0 N ( µ 0 ) ∈ I N 0 for new µ 0 : ( u 0 , 0 ∀ ζ N ∈ H N 0 := span { h 1 N 0 , . . . , h N 0 N ( µ 0 ) , ζ N ) H = ( µ 0 , ζ N ) H N 0 } ◮ matrix-vector form: M init N 0 α 0 ( µ 0 ) = b ( µ 0 ) (projection) � � 0 , h j with M init ( µ i 1 ≤ i , j ≤ N 0 , α 0 ( µ 0 ) = ( α i N 0 = N 0 ) H 0 ( µ 0 )) 1 ≤ i ≤ N 0
page 15/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 2/3 1st step: Initial condiition ◮ construct I N 0 ⊂ I M ⊂ H of (small) dimension N 0 by snapshots S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , I N 0 := span { S 0 N 0 } ◮ RB-approximation u 0 , 0 N ( µ 0 ) ∈ I N 0 for new µ 0 : ( u 0 , 0 ∀ ζ N ∈ H N 0 := span { h 1 N 0 , . . . , h N 0 N ( µ 0 ) , ζ N ) H = ( µ 0 , ζ N ) H N 0 } ◮ matrix-vector form: M init N 0 α 0 ( µ 0 ) = b ( µ 0 ) (projection) � � 0 , h j with M init ( µ i 1 ≤ i , j ≤ N 0 , α 0 ( µ 0 ) = ( α i N 0 = N 0 ) H 0 ( µ 0 )) 1 ≤ i ≤ N 0 ◮ Note: No affine decomposition: ( µ 0 , ζ N ) H online! ◮ approximate µ 0 by µ M 0 ( � ‘standard’ RBM with M parameters) ◮ ( µ 0 , ζ N ) H may be ‘known’ (e.g. Fourier, wavelets, ...)
page 15/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 2/3 1st step: Initial condiition ◮ construct I N 0 ⊂ I M ⊂ H of (small) dimension N 0 by snapshots S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , I N 0 := span { S 0 N 0 } ◮ RB-approximation u 0 , 0 N ( µ 0 ) ∈ I N 0 for new µ 0 : ( u 0 , 0 ∀ ζ N ∈ H N 0 := span { h 1 N 0 , . . . , h N 0 N ( µ 0 ) , ζ N ) H = ( µ 0 , ζ N ) H N 0 } ◮ matrix-vector form: M init N 0 α 0 ( µ 0 ) = b ( µ 0 ) (projection) � � 0 , h j with M init ( µ i 1 ≤ i , j ≤ N 0 , α 0 ( µ 0 ) = ( α i N 0 = N 0 ) H 0 ( µ 0 )) 1 ≤ i ≤ N 0 ◮ Note: No affine decomposition: ( µ 0 , ζ N ) H online! ◮ approximate µ 0 by µ M 0 ( � ‘standard’ RBM with M parameters) ◮ ( µ 0 , ζ N ) H may be ‘known’ (e.g. Fourier, wavelets, ...) ◮ compute S 0 N 0 e.g. by POD
page 15/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 2/3 1st step: Initial condiition ◮ construct I N 0 ⊂ I M ⊂ H of (small) dimension N 0 by snapshots S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , I N 0 := span { S 0 N 0 } ◮ RB-approximation u 0 , 0 N ( µ 0 ) ∈ I N 0 for new µ 0 : ( u 0 , 0 ∀ ζ N ∈ H N 0 := span { h 1 N 0 , . . . , h N 0 N ( µ 0 ) , ζ N ) H = ( µ 0 , ζ N ) H N 0 } ◮ matrix-vector form: M init N 0 α 0 ( µ 0 ) = b ( µ 0 ) (projection) � � 0 , h j with M init ( µ i 1 ≤ i , j ≤ N 0 , α 0 ( µ 0 ) = ( α i N 0 = N 0 ) H 0 ( µ 0 )) 1 ≤ i ≤ N 0 ◮ Note: No affine decomposition: ( µ 0 , ζ N ) H online! ◮ approximate µ 0 by µ M 0 ( � ‘standard’ RBM with M parameters) ◮ ( µ 0 , ζ N ) H may be ‘known’ (e.g. Fourier, wavelets, ...) ◮ compute S 0 N 0 e.g. by POD ◮ also adaptive (Steih, U.)
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } ,
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , ◮ construct RB space ˘ X N 1 ⊂ ˘ X η N 1 = { µ j = ( µ i 0 , µ j by snapshots S 1 1 ) : 1 ≤ j ≤ N 1 } ⊂ S 0 N 0 × D 1 ⊂ D
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , ◮ construct RB space ˘ X N 1 ⊂ ˘ X η N 1 = { µ j = ( µ i 0 , µ j by snapshots S 1 1 ) : 1 ≤ j ≤ N 1 } ⊂ S 0 N 0 × D 1 ⊂ D u j := ˘ u η ( µ j ) ∈ ˘ ◮ compute ˘ X η (offline 2nd step — modified rhs) u j : j = 1 , . . . , N 1 } and set ˘ X N 1 := span { ˘
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , ◮ construct RB space ˘ X N 1 ⊂ ˘ X η N 1 = { µ j = ( µ i 0 , µ j by snapshots S 1 1 ) : 1 ≤ j ≤ N 1 } ⊂ S 0 N 0 × D 1 ⊂ D u j := ˘ u η ( µ j ) ∈ ˘ ◮ compute ˘ X η (offline 2nd step — modified rhs) u j : j = 1 , . . . , N 1 } and set ˘ X N 1 := span { ˘ ◮ for new µ = ( µ 0 , µ 1 ) define (stable) test space Z N 1 ( µ 1 ) ∈ Z δ e.g. by supremizers
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , ◮ construct RB space ˘ X N 1 ⊂ ˘ X η N 1 = { µ j = ( µ i 0 , µ j by snapshots S 1 1 ) : 1 ≤ j ≤ N 1 } ⊂ S 0 N 0 × D 1 ⊂ D u j := ˘ u η ( µ j ) ∈ ˘ ◮ compute ˘ X η (offline 2nd step — modified rhs) u j : j = 1 , . . . , N 1 } and set ˘ X N 1 := span { ˘ ◮ for new µ = ( µ 0 , µ 1 ) define (stable) test space Z N 1 ( µ 1 ) ∈ Z δ e.g. by supremizers ◮ RB approximation: u N ( µ ) := u 0 N ( µ 0 ) + ˘ u N ( µ ) , u N ( µ ) ∈ ˘ where ˘ X N 1 solves u N ( µ ) , z N ) = ˘ f ( u 0 b 1 ( µ 1 ; ˘ N ( µ 0 ) , µ 1 ; z N ) ∀ z N ∈ Z N 1 ( µ 1 ) .
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , ◮ construct RB space ˘ X N 1 ⊂ ˘ X η N 1 = { µ j = ( µ i 0 , µ j by snapshots S 1 1 ) : 1 ≤ j ≤ N 1 } ⊂ S 0 N 0 × D 1 ⊂ D u j := ˘ u η ( µ j ) ∈ ˘ ◮ compute ˘ X η (offline 2nd step — modified rhs) u j : j = 1 , . . . , N 1 } and set ˘ X N 1 := span { ˘ ◮ for new µ = ( µ 0 , µ 1 ) define (stable) test space Z N 1 ( µ 1 ) ∈ Z δ e.g. by supremizers ◮ RB approximation: u N ( µ ) := u 0 N ( µ 0 ) + ˘ u N ( µ ) , u N ( µ ) ∈ ˘ where ˘ X N 1 solves u N ( µ ) , z N ) = ˘ f ( u 0 b 1 ( µ 1 ; ˘ N ( µ 0 ) , µ 1 ; z N ) ∀ z N ∈ Z N 1 ( µ 1 ) . ◮ NO time-marching!
page 16/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time RBM 3/3 2nd step: Evolution with homogeneous initial conditions ◮ extend the ‘space-only’ function u 0 , 0 N ( µ 0 ) ∈ I N 0 ⊂ H 1 (Ω) N ( µ 0 ) := σ 0 ⊗ u 0 , 0 to a space-time function u 0 N ( µ 0 ) ∈ L 2 ( I ; H 1 (Ω)) do this for µ i 0 ∈ S 0 N 0 := { µ i 0 : 1 ≤ i ≤ N 0 } , ◮ construct RB space ˘ X N 1 ⊂ ˘ X η N 1 = { µ j = ( µ i 0 , µ j by snapshots S 1 1 ) : 1 ≤ j ≤ N 1 } ⊂ S 0 N 0 × D 1 ⊂ D u j := ˘ u η ( µ j ) ∈ ˘ ◮ compute ˘ X η (offline 2nd step — modified rhs) u j : j = 1 , . . . , N 1 } and set ˘ X N 1 := span { ˘ ◮ for new µ = ( µ 0 , µ 1 ) define (stable) test space Z N 1 ( µ 1 ) ∈ Z δ e.g. by supremizers ◮ RB approximation: u N ( µ ) := u 0 N ( µ 0 ) + ˘ u N ( µ ) , u N ( µ ) ∈ ˘ where ˘ X N 1 solves u N ( µ ) , z N ) = ˘ f ( u 0 b 1 ( µ 1 ; ˘ N ( µ 0 ) , µ 1 ; z N ) ∀ z N ∈ Z N 1 ( µ 1 ) . ◮ NO time-marching! ◮ b 1 and ˘ f are tensor products!
page 17/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Greedy for initial value ◮ determine by POD or adaptive approximation
page 17/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Greedy for initial value ◮ determine by POD or adaptive approximation ... or ◮ ∆ 0 N 0 ( µ 0 ) := � µ 0 − µ N 0 � H Greedy for initial value train ⊂ D 0 be the training set of initial values, tol 0 > 0 a tolerance. 1: Let M 0 2: Choose µ 1 0 ∈ M 0 train , S 0 1 := { µ 1 0 } 3: for N 0 = 1 , . . . , N max do 0 Compute u N 0 ; 0 = u 0 , 0 δ ( µ N 0 ) ∈ I M as in (3) % Offline 1st step 4: 0 µ N 0 + 1 train ∆ 0 = arg max µ 0 ∈ M 0 N 0 ( µ 0 ) 5: 0 ) < tol 0 then Stop end if N 0 ( µ N 0 + 1 if ∆ 0 6: 0 N 0 ∪ { µ N 0 + 1 S 0 N 0 + 1 := S 0 } 7: 0 8: end for N 0 := span { u i ; 0 := σ 0 ⊗ u i ; 0 9: X 0 : 1 ≤ i ≤ N 0 } 0
page 18/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Greedy for evolution ◮ ∆ 1 N 1 ( µ ) := β − 1 δ � g 1 ( µ 1 ) − b 1 ( µ 1 ; u N ( µ ) , · ) � Y ′ η Greedy for evolution train be the training set, tol 1 > 0 a tolerance. 1: Let M train ⊂ S 0 N 0 × M 1 train , µ 1 , 1 := ( µ 1 2: Choose µ 1 , 1 0 , µ 1 , 1 ∈ M 1 1 ) , S 1 1 := { µ 1 , 1 } 1 3: Compute u 1 , 1 ; 1 = ˘ u δ ( µ 1 , 1 ) ∈ ˘ X δ , N 1 := 1 4: for i = 1 , . . . , N 0 do for j = 1 , . . . , N max do 5: 1 0 , µ 1 )) ; µ i , j := ( µ i µ j 0 , µ j train ∆ 1 N 1 (( µ i 1 = arg max µ 1 ∈ M 1 1 ) 6: N 1 ( µ i , j ) < tol 1 then N i , 1 := j end for j end if if ∆ 1 7: N 1 := N 1 + 1, 8: Compute u i , j ; 1 = ˘ u δ ( µ i , j ) ∈ ˘ X δ % Offline 2nd step (e.g. C-N) 9: S 1 N 1 + 1 := S 1 N 1 ∪ { µ i , j } 10: end for 11: 12: end for
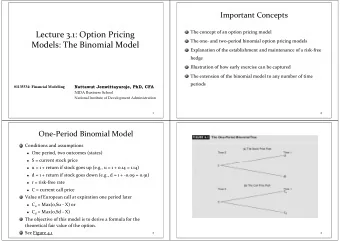
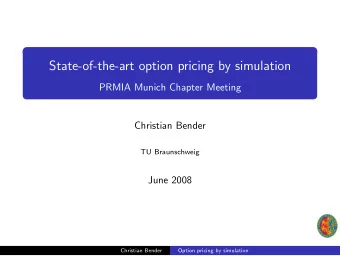
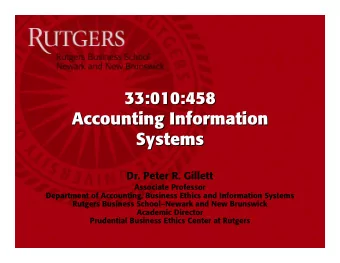
page 19/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Numerical Results ◮ Heston model ◮ model payoff µ 0 by Bezier curves ◮ POD for initial value 0 10 10 − 1 RB solution (internal / initial) 10 − 2 1 2 3 4 5 6 7 Extended initial values
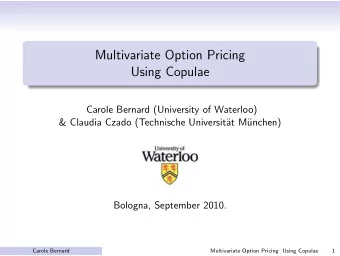
page 20/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Space-Time RBM with variable initial condition Space-Time Errors Erros vs. N 1 for different N 0 ( P = 1 out of 5) (for different parameter selections)
page 21/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | CDOs / HTucker format Background and Motivation 1 Space-Time RBM with variable initial condition 2 CDOs / HTucker format 3 Parabolic Variational Inequalities 4 PPDEs with stochastic parameters (PSPDEs) 5 Summary and outlook 6
page 22/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | CDOs / HTucker format Recall: Additional challenges ◮ several options/assets (WASC, CDOs): � many coupled PDEs, high (space) dimension ◮ American options: variational inequalities (Haasdonk, Salomon, Wohlmuth; Glas, U.) ◮ stochastic coefficients ◮ jump models (Lévy): integral operators, PIDEs (Schwab et al., Kestler, ...) ◮ problems on infinite domains ( S ∈ [ 0 , ∞ ) ) (Kestler, U.) ◮ ...
page 23/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | CDOs / HTucker format CDO pricing model CDO model: N = 2 n coupled PDEs: j ∈ { 1 , . . . N } = N t ( t , y ) = − 1 u j 2 ∇ · ( B ( t ) ∇ u j ( t , y )) − α T ( t ) ∇ u j ( t , y ) + r ( t , y ) u j ( t , y ) � q j , k ( t , y )( a j , k ( t , y ) + u k ( t , y ) − u j ( t , y )) − c j ( t , y ) , − (6a) k ∈N\{ j } u ( t , y ) = 0 , t ∈ ( 0 , T ) , y ∈ ∂ Ω , (6b) u ( T , y ) = ( u 0 T ( y ) , . . . , u N − 1 ( y )) T , y ∈ Ω , (6c) T ◮ CDOs are one reason for the financial crisis ◮ coupling terms q j , k hardly known ◮ goal: find ways to control the market (sensitivities, restrictions to parameters, ...)
page 24/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | CDOs / HTucker format CDO Space-time variational formulation (Kiesel, Rupp, U.) CDO model: N = 2 n coupled PDEs: j ∈ { 1 , . . . N } = N t ( t , y ) = − 1 u j 2 ∇ · ( B ( t ) ∇ u j ( t , y )) − α T ( t ) ∇ u j ( t , y ) + r ( t , y ) u j ( t , y ) � q j , k ( t , y )( a j , k ( t , y ) + u k ( t , y ) − u j ( t , y )) − c j ( t , y ) , − k ∈N\{ j } u ( T , y ) = ( u 0 T ( y ) , . . . , u N − 1 ( y )) T , y ∈ Ω , u ( t , y ) = 0 , t ∈ ( 0 , T ) , y ∈ ∂ Ω , T 0 (Ω) N ) ∩ H 1 ( 0 , T ; H − 1 (Ω) N ) L 2 ( 0 , T ; H 1 X := L 2 ( 0 , T ; H 1 0 (Ω) N ) × L 2 (Ω) N , Y := v = ( v 1 , v 2 ) � T b ( µ ; u , v ) := [( u t ( t ) , v 1 ) 0 ;Ω + a ( µ ; u ( t ) , v 1 )] dt + ( u ( T ) , v 2 ) 0 ;Ω 0 � T f ( v ) := ( f ( t ) , v 1 ( t )) 0 ;Ω + ( u T , v 2 ) 0 ;Ω 0 CDO space-time formulation u ∈ X : b ( µ ; u , v ) = f ( v ) ∀ v = ( v 1 , v 2 ) ∈ Y . (7)
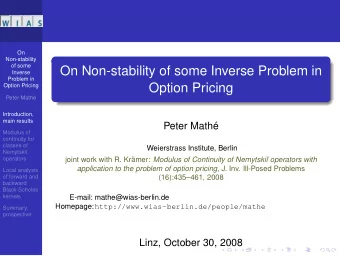
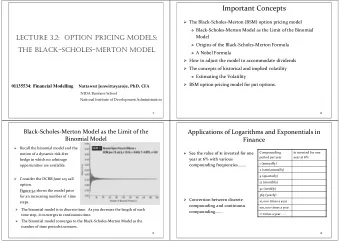
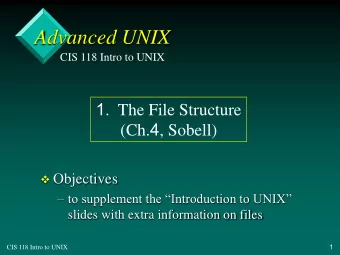
page 25/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | CDOs / HTucker format HTucker simulation of CDOs ◮ use multiwavelets in space ◮ use HTucker-format (Donovan, Geronimo, Hardin; Dijkema, Schwab, Stevenson) (Hackbusch, Kühn, Grasedyck, Kressner, ...) ◮ obtain equivalent ℓ 2 -problem ( → talk of R. Schneider) ( → talk of W. Dahmen) ◮ n : number of assets ◮ can be written in tensor form ◮ � N = 2 n equations (also space/time) state 3 4000 state 2 state 1 state 0 3500 3000 12 2500 8 u runtime[seconds] 4 2000 0 1500 0.8 1000 0.6 0.4 y 500 0 0.2 0.2 0.4 0.6 1 0 0.8 t 0 0 20 40 60 80 100 120 140 number�of�assists�in�the�portfolio
page 26/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Background and Motivation 1 Space-Time RBM with variable initial condition 2 CDOs / HTucker format 3 Parabolic Variational Inequalities 4 PPDEs with stochastic parameters (PSPDEs) 5 Summary and outlook 6
page 27/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Recall: Additional challenges ◮ several options/assets (WASC, CDOs): � many coupled PDEs, high (space) dimension ◮ American options: variational inequalities (Haasdonk, Salomon, Wohlmuth; Glas, U.) ◮ stochastic coefficients ◮ jump models (Lévy): integral operators, PIDEs (Schwab et al., Kestler, ...) ◮ problems on infinite domains ( S ∈ [ 0 , ∞ ) ) (Kestler, U.) ◮ ...
page 28/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Parabolic Variational Inequality PVI( µ ) (Glas, U.) American / swing options � obstacle problem: ( → talks of K. Veroy, J. Salomon) Parameterized Parabolic Variational Inequality: For µ ∈ D , find u ( µ ; t ) ∈ K ( t ) , s.t. for all v ( t ) ∈ K ( t ) , t ∈ ( 0 , T ) a . e . � u t ( µ ; t ) , v ( t ) − u ( µ ; t ) � V ′ × V + a ( µ ; u ( µ ; t ) , v ( t ) − u ( µ ; t )) � f ( µ ; v ( t ) − u ( µ ; t )) where ◮ V ֒ → H Hilbert Spaces ◮ a ( µ ; · , · ) : D × V × V → R (possibly non-coercive) ◮ K ( t ) ⊂ V closed and convex set ◮ f ( µ ; · ) : V → R
page 28/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Parabolic Variational Inequality PVI( µ ) (Glas, U.) American / swing options � obstacle problem: ( → talks of K. Veroy, J. Salomon) Parameterized Parabolic Variational Inequality: For µ ∈ D , find u ( µ ; t ) ∈ K ( t ) , s.t. for all v ( t ) ∈ K ( t ) , t ∈ ( 0 , T ) a . e . � u t ( µ ; t ) , v ( t ) − u ( µ ; t ) � V ′ × V + a ( µ ; u ( µ ; t ) , v ( t ) − u ( µ ; t )) � f ( µ ; v ( t ) − u ( µ ; t )) Transfer into saddle point problem: ◮ W Hilbert space, M ⊂ W convex cone ◮ K ( t ) = { v ∈ V | c ( t ; v , η ) � g ( µ ; η ) , η ∈ M } For µ in D , find ( u ( µ ) , λ ( µ )) ∈ V × M such that for t ∈ ( 0 , T ) a.e. � u t , v � V ′ × V + a ( µ ; u ( µ ) , v ) + c ( t ; v , λ ( µ )) = f ( µ ; v ) , v ∈ V c ( t ; u ( µ ) , η − λ ( µ )) � g ( µ ; η − λ ( µ )) , η ∈ M .
page 29/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Space-Time Formulation of PVIs � u t ( t ) , v ( t ) − u ( t ) � + a ( µ ; u ( t ) , v ( t ) − u ( t )) � f ( µ ; v ( t ) − u ( t )) ∀ v ( t ) ∈ V , t ∈ I a.e.
page 29/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Space-Time Formulation of PVIs � u t ( t ) , v ( t ) − u ( t ) � + a ( µ ; u ( t ) , v ( t ) − u ( t )) � f ( µ ; v ( t ) − u ( t )) ∀ v ( t ) ∈ V , t ∈ I a.e. ◮ X := { w ∈ L 2 ( I ; V ) : ˙ w ∈ L 2 ( I ; V ′ ) , w ( 0 ) = 0 } � T � T � T � u t , v − u � dt + a ( µ ; u , v − u ) dt � f ( µ ; v − u ) dt ∀ v ∈ X 0 0 0
page 29/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Space-Time Formulation of PVIs � u t ( t ) , v ( t ) − u ( t ) � + a ( µ ; u ( t ) , v ( t ) − u ( t )) � f ( µ ; v ( t ) − u ( t )) ∀ v ( t ) ∈ V , t ∈ I a.e. ◮ X := { w ∈ L 2 ( I ; V ) : ˙ w ∈ L 2 ( I ; V ′ ) , w ( 0 ) = 0 } � T � T � T � u t , v − u � dt + a ( µ ; u , v − u ) dt � f ( µ ; v − u ) dt ∀ v ∈ X 0 0 0 � T � T � T � u t , v − u � dt + a ( µ ; u , v − u ) dt f ( µ ; v − u ) dt ∀ v ∈ X � 0 0 0 � �� � � �� � � ˜ b ( µ ; u , v − u ) f ( v − u ; µ ) ∀ v ∈ X
page 30/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Petrov-Galerkin Problem Space-time Saddle Point Problem: For µ in D , find ( u ( µ ) , λ ( µ )) ∈ X × M ( M ⊆ C ( I ; M ) ) such that b ( µ ; u ( µ ) , v ) + c ( v , λ ( µ )) = ˜ f ( µ ; v ) , v ∈ Y := L 2 ( I ; V ) c ( u ( µ ) , η − λ ( µ )) � g ( µ ; η − λ ( µ )) , η ∈ M . ◮ Recall X ֒ → C ( I ; H )
page 30/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Petrov-Galerkin Problem Space-time Saddle Point Problem: For µ in D , find ( u ( µ ) , λ ( µ )) ∈ X × M ( M ⊆ C ( I ; M ) ) such that b ( µ ; u ( µ ) , v ) + c ( v , λ ( µ )) = ˜ f ( µ ; v ) , v ∈ Y := L 2 ( I ; V ) c ( u ( µ ) , η − λ ( µ )) � g ( µ ; η − λ ( µ )) , η ∈ M . ◮ Recall X ֒ → C ( I ; H ) ◮ (Semi-)Norms: ◮ � v � Y := � v � 2 L 2 ( I ; V ) ◮ � v � 2 X := � v � 2 L 2 ( I ; V ) + � v t � 2 L 2 ( I ; V ′ )
page 30/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Petrov-Galerkin Problem Space-time Saddle Point Problem: For µ in D , find ( u ( µ ) , λ ( µ )) ∈ X × M ( M ⊆ C ( I ; M ) ) such that b ( µ ; u ( µ ) , v ) + c ( v , λ ( µ )) = ˜ f ( µ ; v ) , v ∈ Y := L 2 ( I ; V ) c ( u ( µ ) , η − λ ( µ )) � g ( µ ; η − λ ( µ )) , η ∈ M . ◮ Recall X ֒ → C ( I ; H ) ◮ (Semi-)Norms: ◮ � v � Y := � v � 2 L 2 ( I ; V ) ◮ � v � 2 X := � v � 2 L 2 ( I ; V ) + � v t � 2 L 2 ( I ; V ′ ) ◮ | | 2 X := � v � 2 L 2 ( I ; V ) + � v t � 2 L 2 ( I ; V ′ ) + � v ( T ) � 2 | | v | | (U., Patera) H
page 30/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Petrov-Galerkin Problem Space-time Saddle Point Problem: For µ in D , find ( u ( µ ) , λ ( µ )) ∈ X × M ( M ⊆ C ( I ; M ) ) such that b ( µ ; u ( µ ) , v ) + c ( v , λ ( µ )) = ˜ f ( µ ; v ) , v ∈ Y := L 2 ( I ; V ) c ( u ( µ ) , η − λ ( µ )) � g ( µ ; η − λ ( µ )) , η ∈ M . ◮ Recall X ֒ → C ( I ; H ) ◮ (Semi-)Norms: ◮ � v � Y := � v � 2 L 2 ( I ; V ) ◮ � v � 2 X := � v � 2 L 2 ( I ; V ) + � v t � 2 L 2 ( I ; V ′ ) ◮ | | 2 X := � v � 2 L 2 ( I ; V ) + � v t � 2 L 2 ( I ; V ′ ) + � v ( T ) � 2 | | v | | (U., Patera) H ◮ � v � 2 X := � v � 2 L 2 ( I ; V ) + � v ( T ) � 2 H (weaker than | | |·| | | X , � · � X ) ( � v � 2 X := � v � 2 L 2 ( I ; V ) + � v ( T ) � 2 H < � v � 2 L 2 ( I ; V ) + � v t � 2 L 2 ( I ; V ′ ) + � v ( T ) � 2 | 2 H = | | | v | | X )
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c �
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c � (A2) The form b ( µ ; · , · ) is weakly coercive
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c � (A2) The form b ( µ ; · , · ) is weakly coercive with coercivity constant α w > 0, i.e., b ( µ ; v , v ) ≥ α w � v � 2 X , v ∈ X ( � v � X < | | | v | | | X )
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c � (A2) The form b ( µ ; · , · ) is weakly coercive with coercivity constant α w > 0, i.e., b ( µ ; v , v ) ≥ α w � v � 2 X , v ∈ X ( � v � X < | | | v | | | X ) Proof: (in the coercive case) � T � T b ( µ ; v , v ) = � v t , v � dt + a ( µ ; v , v ) dt 0 0 � T � 1 2 � v ( T ) � 2 ( α a � v ( t ) � 2 V − λ a � v ( t ) � 2 H + H ) dt 0 � 1 2 � v ( T ) � 2 H + ( α a − λ a ̺ 2 ) � v � 2 Y � min { 1 / 2 , α a − λ a ̺ 2 } � v � 2 X
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c � (A2) The form b ( µ ; · , · ) is weakly coercive with coercivity constant α w > 0, i.e., b ( µ ; v , v ) ≥ α w � v � 2 X , v ∈ X � ( � v � X < | | | v | | | X ) (A3) The form c ( · , · ) is inf-sup-stable on Y × W , i.e. ∃ β c > 0: c ( v , q ) sup � β c � q � W , ∀ q ∈ W ( ⊂ L 2 ( I ; W )) � v � Y � q � W v ∈Y
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c � (A2) The form b ( µ ; · , · ) is weakly coercive with coercivity constant α w > 0, i.e., b ( µ ; v , v ) ≥ α w � v � 2 X , v ∈ X � ( � v � X < | | | v | | | X ) (A3) The form c ( · , · ) is inf-sup-stable on Y × W , i.e. ∃ β c > 0: c ( v , q ) sup � β c � q � W , ∀ q ∈ W ( ⊂ L 2 ( I ; W )) � v � Y � q � W v ∈Y (A4) The form b ( µ ; · , · ) is symmetrically bounded i.e., ∃ γ s < ∞ : b ( µ ; v , w ) � γ s � v � X | | | w | | | X for v , w ∈ X � ( integration by parts )
page 31/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Preliminaries Properties/Assumptions: (A1) Bilinear forms b ( µ ; · , · ) , c ( · , · ) bounded with constants γ b , γ c � (A2) The form b ( µ ; · , · ) is weakly coercive with coercivity constant α w > 0, i.e., b ( µ ; v , v ) ≥ α w � v � 2 X , v ∈ X � ( � v � X < | | | v | | | X ) (A3) The form c ( · , · ) is inf-sup-stable on Y × W , i.e. ∃ β c > 0: c ( v , q ) sup � β c � q � W , ∀ q ∈ W ( ⊂ L 2 ( I ; W )) � v � Y � q � W v ∈Y (A4) The form b ( µ ; · , · ) is symmetrically bounded i.e., ∃ γ s < ∞ : b ( µ ; v , w ) � γ s � v � X | | | w | | | X for v , w ∈ X � ( integration by parts ) • (A1-A4) � well-posedness of the problem (Glas, U.; Lions/Stampacchia)
page 32/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 1/3 Residuals (space/time): r N ( µ ; v ) := b ( µ ; u − u N , v ) + c ( v , p − p N ) , v ∈ Y , s N ( µ ; q ) := c ( u N , q ) − g ( µ ; q ) , q ∈ W ,
page 32/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 1/3 Residuals (space/time): r N ( µ ; v ) := b ( µ ; u − u N , v ) + c ( v , p − p N ) , v ∈ Y , s N ( µ ; q ) := c ( u N , q ) − g ( µ ; q ) , q ∈ W , Projection: (from the stationary case; [HSW]) ◮ π : W → M orthogonal with respect to �· , ·� π on W . � ◮ Induced norm on W , � η � π := � η, η � π , ◮ c π � η � W � � η � π � C π � η � W ◮ extend that to space/time: W , M
page 32/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 1/3 Residuals (space/time): r N ( µ ; v ) := b ( µ ; u − u N , v ) + c ( v , p − p N ) , v ∈ Y , s N ( µ ; q ) := c ( u N , q ) − g ( µ ; q ) , q ∈ W , Projection: (from the stationary case; [HSW]) ◮ π : W → M orthogonal with respect to �· , ·� π on W . � ◮ Induced norm on W , � η � π := � η, η � π , ◮ c π � η � W � � η � π � C π � η � W ◮ extend that to space/time: W , M Primal/Dual Error Relation c ( v , q ) Properties (A1)-(A4) and inf q ∈W sup ≥ β c > 0 ( � ) � v � X � q � W v ∈X do not yield a primal/dual error relation like: � p − p N � W ≤ 1 ( | | | r N | | | X ′ + γ s � u − u N � X ) . β 1
page 33/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 2/3 Assumption (D): Assume the existence of an invertible mapping D : M → X such that (1) c ( Dp , q ) = � v , q � W , p , q ∈ M (2) ∃ C D , s.t. | | | Dp | | | X � C D � p � W ◮ controls temporal movement/change of obstacle ◮ obstacle case: Riesz operator
page 33/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 2/3 Assumption (D): Assume the existence of an invertible mapping D : M → X such that (1) c ( Dp , q ) = � v , q � W , p , q ∈ M (2) ∃ C D , s.t. | | | Dp | | | X � C D � p � W ◮ controls temporal movement/change of obstacle ◮ obstacle case: Riesz operator Primal/dual error relation If (A1)-(A4), inf-sup and (D) hold, we have � p − p N � W � C D ( | | | r N | | | X ′ + γ s � u − u N � X ) .
page 33/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 2/3 Assumption (D): Assume the existence of an invertible mapping D : M → X such that (1) c ( Dp , q ) = � v , q � W , p , q ∈ M (2) ∃ C D , s.t. | | | Dp | | | X � C D � p � W ◮ controls temporal movement/change of obstacle ◮ obstacle case: Riesz operator Primal/dual error relation If (A1)-(A4), inf-sup and (D) hold, we have � p − p N � W � C D ( | | | r N | | | X ′ + γ s � u − u N � X ) . Note: ◮ error w.r.t. weaker (semi-)norm � · � X , not | | |·| | | X or � · � X
page 33/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 2/3 Assumption (D): Assume the existence of an invertible mapping D : M → X such that (1) c ( Dp , q ) = � v , q � W , p , q ∈ M (2) ∃ C D , s.t. | | | Dp | | | X � C D � p � W ◮ controls temporal movement/change of obstacle ◮ obstacle case: Riesz operator Primal/dual error relation If (A1)-(A4), inf-sup and (D) hold, we have � p − p N � W � C D ( | | | r N | | | X ′ + γ s � u − u N � X ) . Note: ◮ error w.r.t. weaker (semi-)norm � · � X , not | | |·| | | X or � · � X ◮ (D) poses requirement on the movement of the obstacle (in time)
page 33/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 2/3 Assumption (D): Assume the existence of an invertible mapping D : M → X such that (1) c ( Dp , q ) = � v , q � W , p , q ∈ M (2) ∃ C D , s.t. | | | Dp | | | X � C D � p � W ◮ controls temporal movement/change of obstacle ◮ obstacle case: Riesz operator Primal/dual error relation If (A1)-(A4), inf-sup and (D) hold, we have � p − p N � W � C D ( | | | r N | | | X ′ + γ s � u − u N � X ) . Note: ◮ error w.r.t. weaker (semi-)norm � · � X , not | | |·| | | X or � · � X ◮ (D) poses requirement on the movement of the obstacle (in time) ◮ choice of c ( · , · ) � enforcement of obstacle (point wise, average, ...)
page 34/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities RBM: Error/Residual estimate 3/3 Error/residual estimate Let (A1)-(A4), inf-sup, (D) hold. Then � u − u N � X : = ∆ u = c 1 + ( c 2 1 + c 2 ) 1 / 2 � p − p N � W : = ∆ p = C D ( | | | r N | | | X ′ + γ s ∆ u ) 1 c 1 : = ( � r N � X ′ + γ s C D � π (ˆ s N ) � W ) 2 α w c 2 : = 1 ( C D | | | r N | | | X ′ � π (ˆ s N ) � W + � p N , π (ˆ s N ) � W ) α w
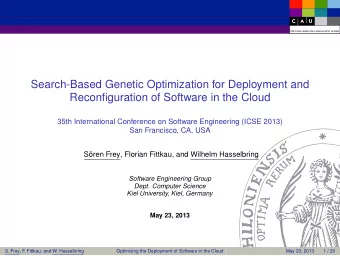
page 35/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Numerical example: 1-D Heat Conduction Wire with two heat conductivities: ◮ D := [ 0 , 1 ] , D 1 := [ 0 , 1 2 ) , D 2 := [ 1 2 , 1 ] g ◮ t ∈ [ 0 , T ] 1 ◮ µ := µ 1 χ [ 0 , 1 2 ) + µ 2 χ [ 1 2 0 1 2 , 1 ] µ 1 µ 2 Strong Formulation: u t − ∇ ( µ ∇ u ) � f , x ∈ D , t ∈ [ 0 , T ] µ∂ u ∂ n = 1 , x ∈ { 0 } , t ∈ [ 0 , T ] x ∈ { 1 } , t ∈ [ 0 , T ] u = 0 , x ∈ D u ( x , 0 ) = 0 ,
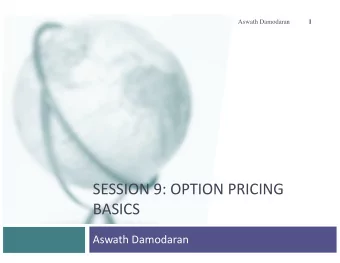
page 36/54 Reduced Basis Methods for Option Pricing | Paristech, 14.-18.04.2014 | Karsten Urban | Parabolic Variational Inequalities Detailed Solution with obstacle ◮ f = 1 ◮ Obstacle constant 0 . 6 , 0 . 4 , 0 . 2 ◮ D = [ 0 , 1 ] , # intervals = 10 ◮ T = 0 . 1, # intervals = 50
Recommend

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.