REAL-TIME IMPACT FORCE IDENTIFICATION OF CFRP LAMINATED PLATES USING - PDF document
18 TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS REAL-TIME IMPACT FORCE IDENTIFICATION OF CFRP LAMINATED PLATES USING SOUND WAVES S. Atobe 1* , H. Kobayashi 2 , N. Hu 3 and H. Fukunaga 1 1 Department of Aerospace Engineering, Tohoku
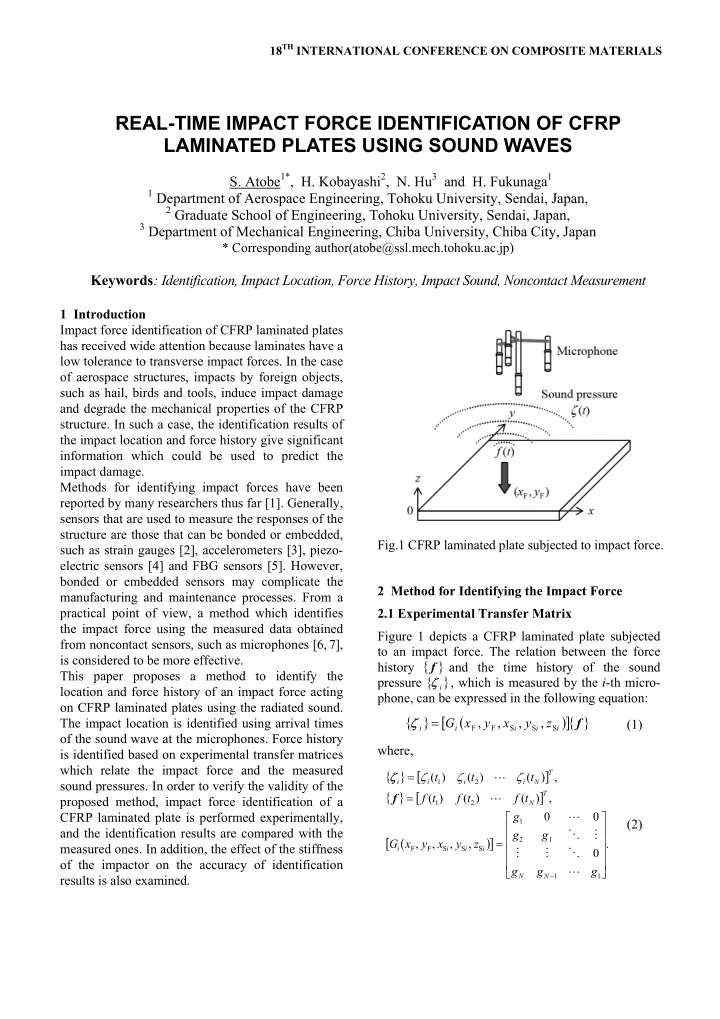
18 TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS REAL-TIME IMPACT FORCE IDENTIFICATION OF CFRP LAMINATED PLATES USING SOUND WAVES S. Atobe 1* , H. Kobayashi 2 , N. Hu 3 and H. Fukunaga 1 1 Department of Aerospace Engineering, Tohoku University, Sendai, Japan, 2 Graduate School of Engineering, Tohoku University, Sendai, Japan, 3 Department of Mechanical Engineering, Chiba University, Chiba City, Japan * Corresponding author(atobe@ssl.mech.tohoku.ac.jp) Keywords : Identification, Impact Location, Force History, Impact Sound, Noncontact Measurement 1 Introduction Impact force identification of CFRP laminated plates has received wide attention because laminates have a low tolerance to transverse impact forces. In the case of aerospace structures, impacts by foreign objects, such as hail, birds and tools, induce impact damage and degrade the mechanical properties of the CFRP structure. In such a case, the identification results of the impact location and force history give significant information which could be used to predict the impact damage. Methods for identifying impact forces have been reported by many researchers thus far [1]. Generally, sensors that are used to measure the responses of the structure are those that can be bonded or embedded, Fig.1 CFRP laminated plate subjected to impact force. such as strain gauges [2], accelerometers [3], piezo- electric sensors [4] and FBG sensors [5]. However, bonded or embedded sensors may complicate the 2 Method for Identifying the Impact Force manufacturing and maintenance processes. From a practical point of view, a method which identifies 2.1 Experimental Transfer Matrix the impact force using the measured data obtained Figure 1 depicts a CFRP laminated plate subjected from noncontact sensors, such as microphones [6, 7], to an impact force. The relation between the force is considered to be more effective. history { } f and the time history of the sound This paper proposes a method to identify the pressure { } ζ , which is measured by the i -th micro- i location and force history of an impact force acting phone, can be expressed in the following equation: on CFRP laminated plates using the radiated sound. [ ] { } { } ( ) ζ = The impact location is identified using arrival times G x , y , x , y , z f (1) i i F F S i S i S i of the sound wave at the microphones. Force history where, is identified based on experimental transfer matrices which relate the impact force and the measured { } [ ] T ζ = ζ ζ ζ ( t ) ( t ) ( t ) , L i i 1 i 2 i N sound pressures. In order to verify the validity of the [ ] { } = T f f ( t ) f ( t ) f ( t ) , L proposed method, impact force identification of a 1 2 N CFRP laminated plate is performed experimentally, g 0 0 L (2) 1 and the identification results are compared with the g g O M [ ] ( ) = 2 1 G x , y , x , y , z . measured ones. In addition, the effect of the stiffness i F F S i S i S i 0 M M O of the impactor on the accuracy of identification g g g L − N N 1 1 results is also examined.
ζ Here, i t ( n ) and f ( n t ) are the sound pressure and As a preparatory work for impact force identification, = ∆ = , respectively, force at time t n n t ( n 1 , , N ) construction of the experimental transfer matrices is K s is the sampling time, and [ ] ∆ t G is a transfer undertaken. The identification region is divided into s i matrix composed of the Green’s function. It is discrete areas, as shown in Fig.2 (a), and impact tests worthwhile to note that the transfer matrix is defined are conducted at every node. Then, the experimental by a function of the impact location ( x F y , ) and transfer matrices are determined for each combi- F sensor location ( x , y , z ) , and is not dependent nation of node and sensor by employing Eq.(5). S i S i S i on the force history. Inside four nodes in each area, the transfer matrix is The transfer matrix is determined experimentally interpolated using shape functions similar to those using the measured data obtained from impact tests used in finite element analyses. When a four-node conducted by an impulse hammer [8]. By trans- two-dimensional element is used, as depicted in forming Eq.(1), we obtain Fig.2 (b), the transfer matrix interpolation is expressed as: { } [ ] { } ζ = F g (3) i i [ ] ( ) G x , y , x , y , z i F F S i S i S i where, 4 (6) ∑ [ ( ) ] = × N G x , y , x , y , z f ( t ) 0 0 L l i l l S i S i S i 1 l = 1 f ( t ) f ( t ) O M [ ] = 2 1 F , where 0 M M O (4) f ( t ) f ( t ) f ( t ) L 1 1 N N − 1 1 ( )( ) ( )( ) = − ξ − η = + ξ − η N 1 1 , N 1 1 , [ ] . 1 F F 2 F F { } = T 4 4 g g g g L (7) i 1 2 N 1 1 ( )( ) ( )( ) . = + ξ + η = − ξ + η N 1 1 , N 1 1 The components of the transfer matrix { } 3 F F 4 F F g are 4 4 i determined so that the estimated sound pressure, Here, ( x l y , ) are the coordinates of node l , and which is given by Eq.(3) using the measured force l ξ F η ( , ) are the normalized coordinates of the impact history, is adjusted to the measured one. In order to F location. reduce the effect of measurement error, the measured data are obtained by conducting impact 2.2 Impact Location Identification tests K times. Thus, the components are determined The impact location is identified using the difference by solving the optimization problem as follows: in the arrival times of the sound waves. The optimization problem solved in the impact location K } [ ] { ∑ { } . 2 ζ − k k minimize : F g identification is as follows: (5) i i { } g i = k 1 − 2 I 1 I 1 ∑ ∑ ∆ − − minimize : t ( r r ) (8) Here, the least-squares method is used to solve Eq.(5). ij j i ( ) v x , y F F = = + i 1 j i 1 Here, ∆ t ij is the difference in the arrival times at the i -th and j -th microphones, r is the distance between the impact location and the microphone, and v is the speed of sound in the air. In order to solve the optimization problem of Eq.(8), the conjugate gradient method with golden section method is used. 2.3 Force History Identification The force history is identified by minimizing the deviation between the measured sound pressures and (a) (b) the estimated ones using the experimental transfer matrices. Then, the identification problem reduces to Fig.2 Interpolation of transfer matrix.
Recommend


















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.