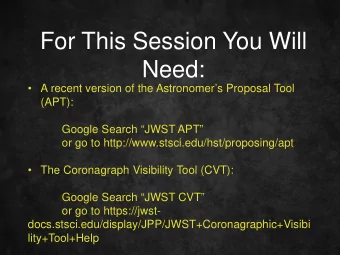
Range Estimation Range Estimation . . . under Constraints Known - PowerPoint PPT Presentation
Need for Data Processing Need to Take . . . Need to Take . . . What Is Computable: . . . Range Estimation Range Estimation . . . under Constraints Known Negative Result Computably . . . is Computable Main Result Auxiliary Result Unless
Need for Data Processing Need to Take . . . Need to Take . . . What Is Computable: . . . Range Estimation Range Estimation . . . under Constraints Known Negative Result Computably . . . is Computable Main Result Auxiliary Result Unless There Is Home Page a Discontinuity Title Page ◭◭ ◮◮ Martine Ceberio, Olga Kosheleva, ◭ ◮ and Vladik Kreinovich Page 1 of 18 University of Texas at El Paso El Paso, TX 79968, USA Go Back mceberio@utep.edu, olgak@utep.edu, Full Screen vladik@utep.edu Close Quit
Need for Data Processing Need to Take . . . 1. Outline Need to Take . . . • One of the main problems of interval computations is What Is Computable: . . . computing the range of a given f-n over given intervals. Range Estimation . . . Known Negative Result • There is a general algorithm for computing the range Computably . . . of computable functions over computable intervals. Main Result • However, in practice, not all possible combinations of Auxiliary Result the inputs are possible, i.e., there are constraints. Home Page • Under constraints, it becomes impossible to have an Title Page algorithm which would always compute this range. ◭◭ ◮◮ • In this talk, we explain that the main reason why range ◭ ◮ estimation under constraints is not always computable: Page 2 of 18 – constraints may introduce discontinuity, while Go Back – all computable functions are continuous. Full Screen • We show that under computably continuous constraints, the problem of range estimation remains computable. Close Quit
Need for Data Processing Need to Take . . . 2. Need for Data Processing Need to Take . . . • We often need to make a decision, e.g., to select an What Is Computable: . . . engineering design and/or control strategy. Range Estimation . . . Known Negative Result • For this, we need to know the effects of selecting dif- Computably . . . ferent alternatives. Main Result • In most engineering problems, we know: Auxiliary Result – how different quantities depend on each other and Home Page – how they change with time. Title Page • In particular, we usually know the dependence ◭◭ ◮◮ – of the quantity y describing the effect ◭ ◮ – on the values of the quantities x 1 , . . . , x n describing Page 3 of 18 the decision and the surrounding environment: Go Back y = f ( x 1 , . . . , x n ) . Full Screen • The resulting computations are known as data process- Close ing . Quit
Need for Data Processing Need to Take . . . 3. Need to Take Uncertainty into Account Need to Take . . . • In the ideal situation, we know the exact values What Is Computable: . . . x 1 , . . . , x n of the corresponding parameters. Range Estimation . . . Known Negative Result • Then, we can simply substitute these values into a Computably . . . known function f , and get the desired value y . Main Result • In practice, the values x 1 , . . . , x n come from measure- Auxiliary Result ments, which are never absolutely accurate. Home Page • The measurement results � x 1 , . . . , � x n are, in general, Title Page somewhat different from the actual (unknown) values x i . ◭◭ ◮◮ • Thus, the estimate � y = f ( � x 1 , . . . , � x n ) is, in general, ◭ ◮ different from the desired value y = f ( x 1 , . . . , x n ). Page 4 of 18 • To make an appropriate decision, it is important to Go Back know how big can be the difference � y − y . Full Screen Close Quit
Need for Data Processing Need to Take . . . 4. Need for Range Estimation Need to Take . . . • Often, our only information about the measurement What Is Computable: . . . def error ∆ x i = � x i − x i is the upper bound ∆ i : | ∆ x i | ≤ ∆. Range Estimation . . . Known Negative Result • In this case, based on the measurement result � x i , we Computably . . . def only know that x i ∈ [ x i , x i ] = [ � x i − ∆ i , � x i + ∆ i ]. Main Result • Another case of such an interval uncertainty is when Auxiliary Result the parameter x i characterizes a manufactured part. Home Page • In this case, we know that the corresponding value Title Page must lie within the tolerance interval [ x i , x i ]. ◭◭ ◮◮ • Different values x i ∈ [ � x i − ∆ i , � x i + ∆ i ] lead, in general, ◭ ◮ to different values of y = f ( x 1 , . . . , x n ). Page 5 of 18 • It is therefore important to estimate the range of all Go Back such values { f ( x 1 , . . . , x n ) : x i ∈ [ x i , x i ] for all i } . Full Screen Close Quit
Need for Data Processing Need to Take . . . 5. Interval Computations Need to Take . . . • In the usual case of continuous f-ns f , this range is an What Is Computable: . . . def interval [ y, y ] = { f ( x 1 , . . . , x n ) : x i ∈ [ x i , x i ] for all i } . Range Estimation . . . Known Negative Result • Estimation of this range interval is known as interval Computably . . . computations . Main Result • For computable functions f on computable intervals Auxiliary Result [ x i , x i ], there is an algorithm which computes this range. Home Page • In general, the corresponding computational problem Title Page is NP-hard (i.e., it may take a very long time). ◭◭ ◮◮ • However, there are many situations where feasible al- ◭ ◮ gorithms are possible for exact computations. Page 6 of 18 • There are also many feasible algorithms for providing Go Back enclosures for the desired ranges. Full Screen Close Quit
Need for Data Processing Need to Take . . . 6. Need to Take Constraints into Account Need to Take . . . • The above formulation of range estimation problem as- What Is Computable: . . . sumes that the quantities x 1 , . . . , x n are independent: Range Estimation . . . Known Negative Result – the set of possible values of, e.g., x 1 , Computably . . . – does not depend on the actual values of all other Main Result quantities. Auxiliary Result • In practice, we often have additional constraints which Home Page limit possible combinations of values ( x 1 , . . . , x n ). Title Page • For example, if x 1 and x 2 represent the control values ◭◭ ◮◮ at two consequent moments of time, then ◭ ◮ | x 1 − x 2 | < δ for some small value δ > 0 . Page 7 of 18 • We are interested in the range of the values f ( x 1 , . . . , x n ) Go Back corr. to ( x 1 , . . . , x n ) satisfying all the constraints. Full Screen • Adding constraints makes the general problem not com- putable. Close Quit
Need for Data Processing Need to Take . . . 7. What Is Computable: Reminder Need to Take . . . • A real number x is computable if there exists an algo- What Is Computable: . . . rithm that, given k ∈ N , returns a rational r k s.t. Range Estimation . . . Known Negative Result | r k − x | ≤ 2 − k . Computably . . . • An interval [ x, x ] is called computable if both its end- Main Result points are computable. Auxiliary Result Home Page • A function f ( x 1 , . . . , x n ) from real numbers to real num- bers is called computable if there exist two algorithms: Title Page ◭◭ ◮◮ – an algorithm that, given rational numbers r 1 , . . . , r n , and an integer k , returns a rational number r s.t. ◭ ◮ | r − f ( r 1 , . . . , r n ) | ≤ 2 − k ; Page 8 of 18 Go Back – an algorithm that, given a rational number ε > 0, returns a rational number δ > 0 such that Full Screen if | x i − x ′ i | ≤ δ for all i, then | f ( x 1 , . . . , x n ) − f ( x ′ 1 , . . . , x ′ n ) | ≤ ε. Close Quit
Need for Data Processing Need to Take . . . 8. Known Positive Result Need to Take . . . • The following algorithm, What Is Computable: . . . Range Estimation . . . – given a computable function f ( x 1 , . . . , x n ) and com- Known Negative Result putable intervals x i = [ x i , x i ] (1 ≤ i ≤ n ), Computably . . . – returns the range [ y, y ] = { f ( x 1 , . . . , x n ) : x i ∈ x i } . Main Result • We want to compute y with accuracy ε > 0. Auxiliary Result • We find δ > 0 s.t. | x i − x ′ Home Page i | ≤ δ implies that the values of f are ( ε/ 2)-close to each other. Title Page • On each interval [ x i , x i ], we then select finitely many ◭◭ ◮◮ points x i , x i + δ , x i + 2 δ , . . . ◭ ◮ • For each combination of selected points, we produce a Page 9 of 18 rational r which is ( ε/ 2)-close to f ( s 1 , . . . , s n ). Go Back • The largest r of these rational numbers is the desired Full Screen ε -approximation to y . Close • The smallest r of these r ’s is ε -close to y . Quit
Need for Data Processing Need to Take . . . 9. Proof that the Above Algorithm Is Correct Need to Take . . . • Each rational r is bounded by f ( s 1 , . . . , s n ) + ε 2. What Is Computable: . . . Range Estimation . . . • Thus, f ( s 1 , . . . , s n ) ≤ y implies r ≤ y + ε 2. Known Negative Result • In particular, r ≤ y + ε Computably . . . 2 ≤ y + ε . Main Result • Let us consider the values x i s.t. f ( x 1 , . . . , x n ) = y . Auxiliary Result Home Page • Each x i is δ -close to some s i , so: Title Page | f ( s 1 , . . . , s n ) − f ( x 1 , . . . , x n ) | ≤ ε 2 and f ( s 1 , . . . , s n ) ≥ y − ε 2 . ◭◭ ◮◮ • For the corresponding r , we have r ≥ f ( s 1 , . . . , s n ) − ε ◭ ◮ 2 and hence, r ≥ y − ε . Page 10 of 18 • Thus, r ≥ r ≥ y − ε . Go Back • We have proved that r ≤ y + ε , so r is ε -close to y . Full Screen • Similarly, r is ε -close to y . Close Quit
Recommend

![Range Definitions integer range [1..5] one_five ; ConstExp 5 int 2 ConstExp 1 type 1](https://c.sambuz.com/1035594/range-definitions-s.webp)







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.