
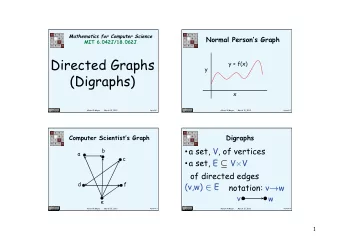
Quantized Average Consensus on Gossip Digraphs Hideaki Ishii Tokyo - PowerPoint PPT Presentation
Quantized Average Consensus on Gossip Digraphs Hideaki Ishii Tokyo Institute of Technology Joint work with Kai Cai Workshop on Uncertain Dynamical Systems Udine, Italy August 25th, 2011 Multi-Agent Consensus Fl Flocks of fish/birds k f
Quantized Average Consensus on Gossip Digraphs Hideaki Ishii Tokyo Institute of Technology Joint work with Kai Cai Workshop on Uncertain Dynamical Systems Udine, Italy August 25th, 2011
Multi-Agent Consensus Fl Flocks of fish/birds k f fi h/bi d F Formation of autonomous robots/ ti f t b t / mobile sensor networks Distributed randomized PageRank 2 algorithm for ranking webpages Ishii & Tempo (2010)
Multi-Agent Consensus Some basic questions: What are the necessary network connectivity for achieving consensus? achieving consensus? Is it possible to enhance performance/capabilities of the overall system by introducing extra dynamics in agents? E g Acceleration of convergence in consensus E.g. Acceleration of convergence in consensus Liu, Anderson, Cao, & Morse (2009) Focus of this talk: Average consensus on directed graphs with communication constraints 3
Average Consensus: Introduction Edge Agent i Network of n agents on a directed graph (digraph) Each agent updates its state based on neighbors’ info All states must converge to the average of their initial values All t t t t th f th i i iti l l Motivation: Sensor networks 4
Known Conditions on Digraphs When the states are real valued Update law: Update law: L : Graph Laplacian L : Graph Laplacian Average Consensus: Graph is strongly connected and balanced The matrix I-L becomes doubly stochastic Can this condition b be relaxed? l d? Balanced Not balanced 5 Olfati-Saber & Murray (2004)
Recent Approaches for General Digraphs 1. Cooperative algorithm to make doubly stochastic Gharesifard & Cortes (2011) 2. Use of variables in addition to states in agents Computation of stationary distributions of Markov chains B Benezit, Blondel, Thiran, Tsitsiklis, & Vetterli (2010) it Bl d l Thi T it ikli & V tt li (2010) Our approach: Conventional consensus based Uses local variables that record changes in states 6
Communication Constraint 1 Edge Edge Agent i Quantized states: Integer valued Model of finite data in communication and computation Model of finite data in communication and computation The average value may not be an integer nor unique: or Kashap, Basar, & Srikant (2007), Carli, Fagnani, Frasca, & Zampieri (2010) 7
Communication Constraint 2 Agent j Agent i Gossip Algorithm At each time instant, one edge is chosen randomly Asynchronous protocol for distributed systems B Boyd, Ghosh, Prabhakar, & Shah (2006) d Gh h P bh k & Sh h (2006) 8
Simpler Case: Quantized Consensus Agent j Agent i Only agreement in the states (no averaging) Distributed algorithm If If , then then If , then If , then 9
Quantized Consensus Theorem: For each initial state, there exists a finite such that with prob 1 with prob. 1. The underlying graph has a globally reachable node. A node from which there is a directed path to every other A d f hi h th i di t d th t th node in the graph 10 10
Discussion Randomization is crucial for quantized states case. With this algorithm, average consensus is not possible because the state sum can vary over time: because the state sum can vary over time: Hence, the true average is lost from the system. Key Idea: The agents must be aware of how much state change was made in the past. 11 11
Towards Obtaining the Average Additional elements for each agent i Surplus Locally keeps track of state changes Locally keeps track of state changes Initial value Threshold Determines when to use surplus in state updates Simple choice: Local minimum & maximum: Keep the state bounded 12 12
Quantized Average Consensus Agent j Agent i Distributed algorithm Surplus: Surplus: Surplus of agent j is transferred to i Surplus of agent j is transferred to i Ch Change in the state at time k i th t t t ti k State: If If , then , then If , then 13 13
Quantized Average Consensus Agent j Agent i If , then there are three cases: If If and local max, then and local max then If and local min, then Otherwise, 14 14
Numerical Example Network of 50 agents on a random digraph Initial values: Uniformly distributed in [ 5 5] Initial values: Uniformly distributed in [-5,5] Consensus but below the average Quantized Average Average Large surplus g p Surplus changes even after consensus 15 15
The Role of Surplus Sum of states and surpluses remains constant: Even after average consensus, nonzero surplus may be f passed around. If states are in consensus but below average, then surplus will eventually be collected at an agent i as surplus will eventually be collected at an agent i as This means too much surplus in the system. 16 16
Quantized Average Consensus: Result Theorem: For each initial state, there exists a finite such that or or with prob. 1. with prob. 1. The underlying graph is strongly connected. 17 17
Quantized Average Consensus: Result Average consensus is possible for general directed graphs, where state sum can be varying. The use of surplus variables is essential The use of surplus variables is essential. Condition on graphs: Balanced structure is no longer needed. Proof is based on finite Markov chain arguments. g 18 18
Discussion Scalability: Exact (quantized) average is obtained for any number of agents. b f t Tradeoffs More communication and local computation are required. p q Convergence time may be slow. More updates are needed even after the agents arrive at M d t d d ft th t i t consensus (not at the average). 19 19
Threshold Range may not be realistic in an uncertain environment. How sensitive is the algorithm to the choice of ? H iti i th l ith t th h i f ? Theorem: The algorithm achieves quantized average The algorithm achieves quantized average Threshold satisfies 20 20
Threshold vs Consensus Values The values that the agents potentially agree on. Quantized Average Threshold 21 21
Threshold vs Convergence Time Convergence is faster for smaller . This is because the decision to distribute surpluses can This is because the decision to distribute surpluses can be made earlier. For a complete digraph with 50 agents Convergence Time Threshold 22 22
Convergence Time Analysis How does the convergence time scale with the number n of agents? n of agents? Given initial states : Time to reach quantized average consensus Random variable Find a bound on the mean convergence time: Difficulty: Complicated dynamics of states and surpluses p y p 23 23
Convergence Time Analysis: Result Simple case: Complete digraph Th Theorem: Proof is based on the Lyapunov function: “Good” “Bad” Conventional one Conventional one surplus surplus The problem is then reduced to hitting time analysis of a Markov chain. 24 24
Convergence Time: Comparison Directed & Directed & Undirected Directed Balanced Complete Cyclic General G l Zhu & Martinez Zhu & Martinez Nedic, Olshevsky, Nedic, Olshevsky, This work This work (2008) Ozdaglar, & Tsitsiklis (2009) Asynchronous sy c o ous Synchronous Sy c o ous Asynchronous sy c o ous 25
Numerical Example Convergence Time Time R Random Geometric d G t i Digraphs Complete Digraphs Number of Agents 26 26
Further Studies: Real-Valued Case Agent j Agent i Distributed algorithm Surplus: Same as quantized case Surplus: Same as quantized case State: State: Surplus Usual consensus 27 27
Further Studies: Real-Valued Case Average consensus on general strongly connected digraphs can be achieved for sufficiently small . Surplus variables play similar roles Surplus variables play similar roles. Linear update laws for the state and surplus, but the system matrix is not stochastic. Analysis based on matrix perturbation theory. y p y Franceschelli, Giua, & Seatzu (2009) 28 28
Conclusion Multi-agent average consensus with quantized states Distributed randomized algorithm via gossiping Di t ib t d d i d l ith i i i Necessary and sufficient condition on graph structure Main message: The overall system capability can be enhanced by adding more dynamics to agents. 29 29
Recommend
![Pescara, Italy, July 2019 DIGRAPHS II Diffusion and Consensus on Digraphs Based on: [1]: J. S.](https://c.sambuz.com/920651/pescara-italy-july-2019-digraphs-ii-diffusion-and-s.webp)







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.