Problem statement: parametrized weak form Exact parametrized - PowerPoint PPT Presentation
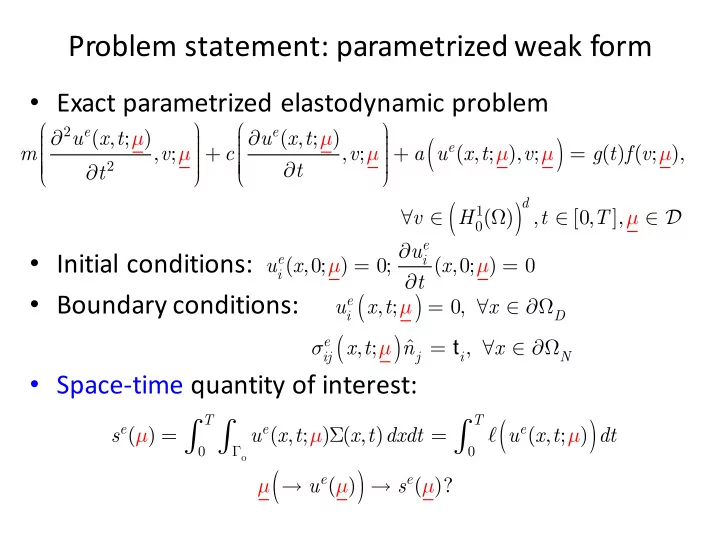
Problem statement: parametrized weak form Exact parametrized elastodynamic problem m 2 u e ( x , t ; ) + c u e ( x , t ; ) ( ) = g ( t ) f ( v ; ), + a u e ( x
Problem statement: parametrized weak form • Exact parametrized elastodynamic problem ⎛ ⎞ ⎛ ⎞ m ∂ 2 u e ( x , t ; µ ) ⎟ + c ∂ u e ( x , t ; µ ) ⎟ ⎟ ⎜ ⎜ ( ) = g ( t ) f ( v ; µ ), ⎟ ⎟ ⎜ ⎜ ⎟ + a u e ( x , t ; µ ), v ; µ , v ; µ , v ; µ ⎟ ⎟ ⎜ ⎜ ⎟ ⎟ ⎜ ⎜ ∂ t 2 ∂ t ⎜ ⎜ ⎝ ⎠ ⎝ ⎠ d , t ∈ [0, T ], µ ∈ D ( ) 1 ( Ω ) ∀ v ∈ H 0 e e ( x ,0; µ ) = 0; ∂ u i • Initial conditions: u i ∂ t ( x ,0; µ ) = 0 e x , t ; µ • Boundary conditions: ( ) = 0, ∀ x ∈ ∂Ω D u i e x , t ; µ ( ) ˆ σ ij n j = t i , ∀ x ∈ ∂Ω N • Space-time quantity of interest: T T ( ) dt s e ( µ ) = ∫ ∫ u e ∫ u e ( x , t ; µ ) ( x , t ; µ ) Σ ( x , t ) dxdt = ℓ 0 Γ o 0 ( ) → s e ( µ )? µ → u e ( µ )
Problem statement… • Bi/linear forms ∂ 2 w i ( ) = ∑ ∫ m w , v ; µ ρ v i ∂ t 2 d Ω Ω i β ∂ v i ∂ w k ( ) = ∑ ∑ ∫ ∫ c w , v ; µ α ρ v i w i d Ω + C ijkl d Ω ∂ x j ∂ x l Ω Ω i i , j , k , l ∂ v i ∂ w k ( ) = ∑ ∫ a w , v ; µ C ijkl d Ω ∂ x j ∂ x l Ω i , j , k , l ( ) = ∑ ∑ ∫ ∫ f v ; µ b i v i d Ω + v i t i d Γ Ω ∂Ω N i i • Bilinear forms are continuous and coercive. m , a • Assume affine parameter dependence of the bi/linear forms
Finite element discretization Trapezoidal scheme • “Method of Lines”: spatial discretize (FE) + temporal discretize (Newmark) – Discretize the time span into [0, T ] [ t k , t k + 1 ], 0 ≤ k ≤ K − 1 – Solve following elliptic systems ( K − 1) ( ) = F ( v ), A u k + 1 ( µ ), v ; µ ∀ v ∈ Y h , µ ∈ D , 1 ≤ k ≤ K − 1 1 2 Δ t c ( u k + 1 ( µ ), v ; µ ) + 1 1 ( ) = A u k + 1 ( µ ), v ; µ Δ t 2 m ( u k + 1 ( µ ), v ; µ ) + 4 a ( u k + 1 ( µ ), v ; µ ) F ( v ) = − 1 2 Δ t c ( u k − 1 ( µ ), v ; µ ) − 1 1 Δ t 2 m ( u k − 1 ( µ ), v ; µ ) + 4 a ( u k − 1 ( µ ), v ; µ ) Δ t 2 m ( u k ( µ ), v ; µ ) − 1 2 2 a ( u k ( µ ), v ; µ ) + g eq ( t k ) f ( v ; µ ) + ∂ u ( µ , t 0 ) ( ) → s ( µ )? u ( µ , t 0 ) = 0; = 0 µ → u ( µ ) ∂ t K − 1 t k + 1 ∑ ( ) dt – FE quantity of interest: ∫ s ( µ ) = u ( x , t ; µ ) ℓ t k k = 0
RB approximation: Galerkin projection • Introduce ; S * = { µ 1 ∈ D , µ 2 ∈ D , … , µ N ∈ D }, 1 ≤ N ≤ N max and nested Lagrangian RB spaces Y N = span{ ζ n ,1 ≤ n ≤ N }, 1 ≤ N ≤ N max – Galerkin projection: N ∑ u N ( µ , t k ) = ( µ , t k ) ζ n , u N n ∀ ζ n ∈ Y N , 1 ≤ k ≤ K n = 1 – Solve the following elliptic systems ( ) = F ( v ), ∀ v ∈ Y N , µ ∈ D , 1 ≤ k ≤ K − 1 k + 1 ( µ ), v ; µ A u N ( ) → s N ( µ )? – RB quantity of interest: µ → u N ( µ ) K − 1 t k + 1 ∑ ( ) dt ∫ s N ( µ ) = u N ( x , t ; µ ) ℓ t k k = 0
Approaches to build goal-oriented basis functions? • Dual Weighted Residual (DWR) method [Meyer et al . 2003] [Grepl et al. 2005] [Bangerth et al . 2001] [Bangerth et al. 2010] – Solve additionally an adjoint problem – Remove the snapshots cause small error – keep the ones cause large error • Build optimal goal-oriented basis functions based on all POD snapshots [Bui et al . 2007] [Willcox et al. 2005] – Use adjoint technique to build optimally basis functions based on all POD snapshots • We want to build optimally goal-oriented basis functions without computing/storing all the snapshots ? RB + Greedy sampling strategy [Rozza, Huynh, Patera 2008]
Standard POD-Greedy algorithm [Haasdonk et al . 2008] [Hoang et al . 2013] st = 0 (a) Set Y N M max { ξ k } k = 1 1) Where: given a set of snapshots st = µ 0 (b) Set µ * the POD space is defined as: W M (c) While » st N ≤ N max ⎛ ⎞ 2 ⎟ ⎜ M max M 1 ⎟ ⎜ ∑ ∑ ⎟ { } k W st = st ( µ * ⎜ W M = arg min inf ξ k − α m v m ⎟ st , t k ),0 ≤ k ≤ K (d) e proj ⎜ ⎟ ⎜ ⎟ M max V M ⊂ span{ ξ 1 , … , ξ M max } α k ∈ ! M ⎟ ⎜ ⎜ ⎟ k = 1 m = 1 st ⊕ POD( W st , M ) ⎝ ⎠ » st Y N + M ← Y N (e) • or, written as: (f) N ← N + M ( ) » W M = POD { ξ 1 , … , ξ M max }, M ⎧ ⎫ ⎪ ⎪ ⎪ ⎪ (g) » ⎪ Δ u ( µ ) ⎪ st = arg max ⎪ ⎪ µ * ⎨ ⎬ ⎪ ⎪ • 2) Projection error: 2 µ ∈Ξ train ⎪ K ⎪ (h) ∑ st ( µ , t k ) u N ⎪ ⎪ ⎪ ⎪ ⎩ ⎭ k = 1 Y { } k ( µ ) = u k ( µ ) − proj Y N u k ( µ ) st ← S * e proj ∪ st st (i) S * µ * » (j) end. 3) Residual ( ) , R ( v ; µ , t k ) = F ( v ) − A u N k + 1 ( µ ), v ; µ 1 ≤ k ≤ K − 1 2 K ∑ (k) R st ( v ; µ , t k ) Δ u ( µ ) = k = 1 ′ Y
Goal-oriented vs. standard POD-Greedy algorithm go = 0 st = 0 (a) Set (a) Set Y N Y N go = µ 0 st = µ 0 (b) Set (b) Set µ * µ * (c) While (c) While go st N ≤ N max N ≤ N max { } { } W st = st ( µ * W go = go ( µ * st , t k ),0 ≤ k ≤ K go , t k ),0 ≤ k ≤ K (d) (d) e proj e proj st ⊕ POD( W st , M ) go ⊕ POD( W go , M ) st Y N + M ← Y N go (e) (e) Y N + M ← Y N CV process (f) (f) N ← N + M N ← N + M ⎧ ⎫ ⎪ ⎪ ⎪ ⎪ ( ) st ⊂ Ξ n + 1 (g) Find ! (g) st st ⎪ ⎪ Δ u ( µ ) N s.t. ∀ µ ∈ Ξ n ⊂ S * st = arg max ⎪ ⎪ µ * ⎨ ⎬ ⎪ ⎪ Δ s ( µ ) 2 µ ∈Ξ train ⎪ ⎪ (h) K ∑ st ( µ , t k ) η T ≤ ≤ 2 − η T u N ⎪ ⎪ ⎪ ⎪ ⎩ ⎭ k = 1 go ( µ ) Y s ( µ ) − s N { } st ← S * ∪ (i) st st S * µ * ⎧ ⎫ ⎪ ⎪ Δ s ( µ ) ⎪ ⎪ go = arg max µ * (h) (j) end. ⎨ ⎬ ⎪ ⎪ st ( µ ) s ! µ ∈Ξ train ⎪ ⎪ ⎩ ⎭ N go ← S * { } (i) ∪ go go S * µ * Asymptotic output error estimation (j) end. 2 st ( µ ) − s N go ( µ ) Δ s ( µ ) = s ! K ∑ (k) (k) R st ( v ; µ , t k ) Δ u ( µ ) = N k = 1 ′ Y
Cross-validation process
Numerical example: 3D dental implant model N = 26343 T = 0.001s Δ t = 2 × 10 − 6 s K = 500 Ξ train = 900
3D Dental implant model problem… • Material properties ( ) ∈ D ≡ [1 × 10 6 Pa,25 × 10 6 ] × [5 × 10 − 6 ,5 × 10 − 5 ] ⊂ ! P = 2 µ = E , β • Explicit bi/linear forms: ∑ ∫ f ( v ) = v i φ i d Γ Γ l i 5 1 ∑ ∑ ∫ m ( w , v ) = ρ r w i v i d Ω ∫ ℓ ( v ) = v 1 d Γ Ω r | Γ o | Γ o r = 1 i 5 ∂ v i ∂ w k ∂ v i 3 ∂ w k ∑ ∑ ∑ ∫ r ∫ a ( w , v ; µ ) = C ijkl d Ω + µ 1 C ijkl d Ω ∂ x j ∂ x l ∂ x j ∂ x l Ω r Ω 3 r = 1, r ≠ 3 i , j , k , l i , j , k , l 5 ∂ v i ∂ w k ∂ v i 3 ∂ w k ∑ ∑ ∑ ∫ r ∫ c ( w , v ; µ ) = β r C ijkl d Ω + µ 2 µ 1 C ijkl d Ω ∂ x j ∂ x l ∂ x j ∂ x l Ω r Ω 3 r = 1, r ≠ 3 i , j , k , l i , j , k , l
Numerical results… Standard POD-Greedy algorithm GO POD-Greedy algorithm
Numerical results… Cross-validation (CV) process All true errors of solution and QoI
Numerical results: QoI True errors vs Error approx. for case 1 Gauss load Max and min effectivities for case 1 Gauss load
Numerical results… • Computational time (online stage) • All calculations were performed on a desktop Intel(R) Core(TM) i7-3930K CPU @3.20GHz 3.20GHz, RAM 32GB , 64-bit Operating System .
References 1. Wang, S., Liu, G. R., Hoang, K. C. , & Guo, Y. (2010). Identifiable range of osseointegration of dental implants through resonance frequency analysis. Medical engineering & physics , 32 (10), 1094-1106. 2. Hoang, K. C. , Khoo, B. C., Liu, G. R., Nguyen, N. C., & Patera, A. T. (2013). Rapid identification of material properties of the interface tissue in dental implant systems using reduced basis method. Inverse Problems in Science and Engineering , 21 (8), 1310-1334. 3. Hoang, K. C. , Kerfriden, P., Khoo, B. C., & Bordas, S. P. A. (2015). An efficient goal-oriented sampling strategy using reduced basis method for parametrized elastodynamic problems. Numerical Methods for Partial Differential Equations , 31 (2), 575-608. 4. Hoang, K. C. , Kerfriden, P., & Bordas, S. (2015). A fast, certified and "tuning-free" two-field reduced basis method for the metamodelling of parametrised elasticity problems. Computer Methods in Applied Mechanics and Engineering, accepted. 5. Hoang, K. C. , Fu, Y., & Song, J. H. (2015). An hp-Proper Orthogonal Decomposition- Moving Least Squares approach for molecular dynamics simulation. Computer Methods in Applied Mechanics and Engineering, accepted.
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.