Polygons as optimal shapes with convexity constraint Jimmy Lamboley - PowerPoint PPT Presentation
Polygons as optimal shapes with convexity constraint Jimmy Lamboley Arian Novruzi Ecole Normale Sup erieure de Cachan University of Ottawa Antenne de Bretagne, France Ontario, Canada Conference on Applied Inverse Problems Non-smooth
Motivation T. Lachand-Robert and M.A. Peletier Newton’s problem: Find U 0 solution of: � dx min { E ( U ) , U ∈ F ad } , E ( U ) = 1 + |∇ U | 2 Ω F ad = { U : Ω �→ [0 , M ] : with graph in conv. env. of ∂ Ω × { 0 } ∪ { U = M } × { M }} Ω ⊂ ❘ 2 a disk, M > 0 Newton found a radially symmetric minimizer In 1996, Brock, Ferone, and Kawohl : the minimizer is not radially symmetric min { G ( θ, u , p ) := h 1 ( u ) − p 2 h 2 ( u ) , u ∈ F ad } , with F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Here u characterizes N := { U = M } The minimizer u 0 : supp ( u ′′ 0 + u 0 ) is finite The set N 0 := { U 0 = M } is a regular polygon centered in Ω J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation T. Lachand-Robert and M.A. Peletier Newton’s problem: Find U 0 solution of: � dx min { E ( U ) , U ∈ F ad } , E ( U ) = 1 + |∇ U | 2 Ω F ad = { U : Ω �→ [0 , M ] : with graph in conv. env. of ∂ Ω × { 0 } ∪ { U = M } × { M }} Ω ⊂ ❘ 2 a disk, M > 0 Newton found a radially symmetric minimizer In 1996, Brock, Ferone, and Kawohl : the minimizer is not radially symmetric min { G ( θ, u , p ) := h 1 ( u ) − p 2 h 2 ( u ) , u ∈ F ad } , with F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Here u characterizes N := { U = M } The minimizer u 0 : supp ( u ′′ 0 + u 0 ) is finite The set N 0 := { U 0 = M } is a regular polygon centered in Ω J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation Figure: Minimizer U 0 as a function of M J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation Figure: Minimizer U 0 as a function of M J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation M. Crouzeix motivated by abstract operator theory: u = 1 G ( θ, u , p ) = h ( p / u ), and r F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Optimal shapes are polygons Furthermore: J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation M. Crouzeix motivated by abstract operator theory: u = 1 G ( θ, u , p ) = h ( p / u ), and r F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Optimal shapes are polygons Furthermore: J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation M. Crouzeix motivated by abstract operator theory: u = 1 G ( θ, u , p ) = h ( p / u ), and r F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Optimal shapes are polygons Furthermore: J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation M. Crouzeix motivated by abstract operator theory: u = 1 G ( θ, u , p ) = h ( p / u ), and r F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Optimal shapes are polygons Furthermore: J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Motivation M. Crouzeix motivated by abstract operator theory: u = 1 G ( θ, u , p ) = h ( p / u ), and r F ad = { u regular enough , u ′′ + u ≥ 0 , 0 < a ≤ u ≤ b } Optimal shapes are polygons Furthermore: J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: shape problem with convexity constraint Our initial problem is: min { J (Ω) , Ω convex , Ω ∈ S ad } , where S ad is a set of 2-dimensional admissible shapes , J : S ad → ❘ is a shape functional Parametrization of Ω: W 1 , ∞ ( ❚ ) := W 1 , ∞ loc ( ❘ ) ∩ { 2 π -periodic } � � � 1 Ω u := ( r , θ ) ∈ [0 , 2 π ] × 0 , , u ( θ ) 0 < u ∈ W 1 , ∞ ( ❚ ) � . u ′′ + u The curvature: κ (Ω u ) = (1+ u ′ 2 ) 3 / 2 . If u ∈ W 1 , ∞ ( ❚ ), we say that u ′′ + u ≥ 0 if � ∀ v ∈ W 1 , ∞ ( ❚ ) with v ≥ 0 , uv − u ′ v ′ � � d θ ≥ 0 . ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
The problem: reformulation For u ∈ W 1 , ∞ ( ❚ ): ⇒ u ′′ + u ≥ 0 in M ( ❚ ) Ω u is convex ⇐ { u ′′ + u = 0 } straight lines on ∂ Ω u : u ′′ + u = � α n δ n corners on the boundary ∂ Ω u : We consider: find u 0 ∈ F ad : � ❚ G ( θ, u , u ′ ) d θ, u ∈ W 1 , ∞ ( ❚ ) , j ( u 0 ) = min { j ( u ) := u ′′ + u ≥ 0 , u ∈ F ad } , where F ad is a set of convenient admissible functions. Choices of F ad : � F ad := u : ∂ Ω u ⊂ A ( a , b ) := i) 1 b ≤ r ≤ 1 � � � ( r , θ ) : a 1 d θ � � � ii) F ad := { u : u ∈ C ( m 0 ) } , C ( m 0 ) := u : u 2 = m 0 2 ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: existence The problem (1) (with inclusion in A ( a , b )) has a solution if , for example, j ( u ) is continuous in H 1 ( ❚ ), because { u ∈ W 1 , ∞ ( ❚ ) , u ′′ + u ≥ 0 , a ≤ u ≤ b } is strongly compact in H 1 ( ❚ ) The problem (2) (with area constraint) the question is more case specific. For example: maximization of the perimeter: non-existence However, existence may be proved for many further functionals J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity Theorem 0.1 1 Let G = G ( θ, u , p ) ∈ C 2 ( ❚ × ❘ × ❘ ) . Set j ( u ) = ❚ G ( θ, u , u ′ ) . � 2 Let u 0 be a solution of (1) or (2) and assume that G satisfies: G pp ( θ, u 0 , u ′ 0 ) < 0 , ∀ θ ∈ ❚ . (3) 3 If u 0 is a solution of (1) , then: S u 0 ∩ I is finite for any I = ( γ 1 , γ 2 ) ⊂ { a < u 0 ( θ ) < b } , and in particular, Ω u 0 is locally polygonal inside the annulus A ( a , b ) . 4 If u 0 > 0 is a solution of (2) , then S u 0 ∩ ❚ is finite, and so Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Theorem 0.2 (inclusion in annulus A ( a , b )) 1 Let j ( u ) = ❚ G ( u , u ′ ) , u 0 be a solution of (1). Assume that � 2 (i) G = G ( u , p ) is a C 2 function and G pp < 0 on { ( u 0 ( θ ) , u ′ 0 ( θ )) , θ ∈ ❚ } , 3 (ii) The function p �→ G ( a , p ) is even and one of the followings holds (ii.1): G u ( a , 0) < 0 , or (ii.2): G u ( a , 0) = 0 and G u ( u 0 , u ′ 0 ) u 0 + G p ( u 0 , u ′ 0 ) u ′ 0 ≤ 0 , 4 (iii) The function p �→ G ( · , p ) is even and G u ≥ 0 near ( b , 0) . 5 Then S u 0 is finite, i.e. Ω u 0 is a polygon. J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Main results: regularity (cont’d) Example Consider u 2 + | u ′ | 2 � J (Ω u ) = λ m (Ω u ) − P (Ω u ) = λ � 1 � u 2 − , u 2 2 ❚ ❚ with m (Ω u ) the area, P (Ω u ) the perimeter, and λ ∈ [0 , + ∞ ] The minimization of J within convex sets and ∂ Ω ⊂ A ( a , b ) is in general a non trivial problem When λ = 0, the solution is the disk of radius 1 a When λ = + ∞ , the solution is the disk of radius 1 b λ ∈ (0 , ∞ ): any solution is locally polygonal inside A ( a , b ) 1 G u ( u , 0) = u − λ G pp = − ( u 2 + p 2 ) 3 / 2 , u 3 From Theorem 0.2, if λ ∈ ( a , b ) then any solution is a polygon J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions Theorem 0.3 (inclusion in A ( a , b )) 1 If u 0 is solves (1) and j ∈ C 1 ( H 1 ( ❚ ); ❘ ), then there exist 0 ≤ ζ 0 ∈ H 1 ( ❚ ) , µ a , µ b ∈ M + ( ❚ ) such that { ζ 0 = 0 }⊂ S u 0 , Supp ( µ a ) ⊂{ u 0 = a } , Supp ( µ b ) ⊂{ u 0 = b } . 2 v ∈ H 1 ( ❚ ) : � � j ′ ( u 0 ) v = � ζ 0 + ζ ′′ 0 , v � U ′ × U + vd µ a − vd µ b . ❚ ❚ 3 Moreover, ∀ v ∈ H 1 ( ❚ ) such that ∃ λ ∈ ❘ with v ′′ + v λ ( u ′′ ≥ 0 + u 0 ) v ≥ λ ( u 0 − a ) , j ′′ ( u 0 )( v , v ) ≥ 0 . ⇒ v ≤ λ ( u 0 − b ) , � ζ 0 + ζ ′′ � 0 , v � U ′ × U + ❚ vd ( µ a − µ b ) = 0 , J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) Ioffe A. D - Tihomirov V. M. , Maurer H. - Zowe J. Abstract setting: U , Y real Banach, ∅ � = K ⊂ Y closed convex cone, f : U → ❘ , g : U → Y , min { f ( u ) , u ∈ U , g ( u ) ∈ K } . Proposition 0.4 Let u 0 ∈ U solve the min. problem. Assume f , g are C 2 at u 0 and g ′ ( u 0 )( U ) = Y . Then, (i) ∃ l ∈ Y ′ + : f ′ ( u 0 ) = l ◦ g ′ ( u 0 ) and l ( g ( u 0 )) = 0 , where Y ′ + = { l ∈ Y ′ ; ∀ k ∈ K , l ( k ) ≥ 0 } (ii) Set L ( u ) := f ( u ) − l ( g ( u )) . Then F ′′ ( u 0 )( v , v ) ≥ 0 , ∀ v ∈ T u 0 , � v ∈ U ; f ′ ( u 0 )( v ) = 0 , T u 0 = g ′ ( u 0 )( v ) ∈ K g ( u 0 ) = { K + λ g ( u 0 ); λ ∈ ❘ } � . J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) Ioffe A. D - Tihomirov V. M. , Maurer H. - Zowe J. Abstract setting: U , Y real Banach, ∅ � = K ⊂ Y closed convex cone, f : U → ❘ , g : U → Y , min { f ( u ) , u ∈ U , g ( u ) ∈ K } . Proposition 0.4 Let u 0 ∈ U solve the min. problem. Assume f , g are C 2 at u 0 and g ′ ( u 0 )( U ) = Y . Then, (i) ∃ l ∈ Y ′ + : f ′ ( u 0 ) = l ◦ g ′ ( u 0 ) and l ( g ( u 0 )) = 0 , where Y ′ + = { l ∈ Y ′ ; ∀ k ∈ K , l ( k ) ≥ 0 } (ii) Set L ( u ) := f ( u ) − l ( g ( u )) . Then F ′′ ( u 0 )( v , v ) ≥ 0 , ∀ v ∈ T u 0 , � v ∈ U ; f ′ ( u 0 )( v ) = 0 , T u 0 = g ′ ( u 0 )( v ) ∈ K g ( u 0 ) = { K + λ g ( u 0 ); λ ∈ ❘ } � . J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) Ioffe A. D - Tihomirov V. M. , Maurer H. - Zowe J. Abstract setting: U , Y real Banach, ∅ � = K ⊂ Y closed convex cone, f : U → ❘ , g : U → Y , min { f ( u ) , u ∈ U , g ( u ) ∈ K } . Proposition 0.4 Let u 0 ∈ U solve the min. problem. Assume f , g are C 2 at u 0 and g ′ ( u 0 )( U ) = Y . Then, (i) ∃ l ∈ Y ′ + : f ′ ( u 0 ) = l ◦ g ′ ( u 0 ) and l ( g ( u 0 )) = 0 , where Y ′ + = { l ∈ Y ′ ; ∀ k ∈ K , l ( k ) ≥ 0 } (ii) Set L ( u ) := f ( u ) − l ( g ( u )) . Then F ′′ ( u 0 )( v , v ) ≥ 0 , ∀ v ∈ T u 0 , � v ∈ U ; f ′ ( u 0 )( v ) = 0 , T u 0 = g ′ ( u 0 )( v ) ∈ K g ( u 0 ) = { K + λ g ( u 0 ); λ ∈ ❘ } � . J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) Ioffe A. D - Tihomirov V. M. , Maurer H. - Zowe J. Abstract setting: U , Y real Banach, ∅ � = K ⊂ Y closed convex cone, f : U → ❘ , g : U → Y , min { f ( u ) , u ∈ U , g ( u ) ∈ K } . Proposition 0.4 Let u 0 ∈ U solve the min. problem. Assume f , g are C 2 at u 0 and g ′ ( u 0 )( U ) = Y . Then, (i) ∃ l ∈ Y ′ + : f ′ ( u 0 ) = l ◦ g ′ ( u 0 ) and l ( g ( u 0 )) = 0 , where Y ′ + = { l ∈ Y ′ ; ∀ k ∈ K , l ( k ) ≥ 0 } (ii) Set L ( u ) := f ( u ) − l ( g ( u )) . Then F ′′ ( u 0 )( v , v ) ≥ 0 , ∀ v ∈ T u 0 , � v ∈ U ; f ′ ( u 0 )( v ) = 0 , T u 0 = g ′ ( u 0 )( v ) ∈ K g ( u 0 ) = { K + λ g ( u 0 ); λ ∈ ❘ } � . J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) Ioffe A. D - Tihomirov V. M. , Maurer H. - Zowe J. Abstract setting: U , Y real Banach, ∅ � = K ⊂ Y closed convex cone, f : U → ❘ , g : U → Y , min { f ( u ) , u ∈ U , g ( u ) ∈ K } . Proposition 0.4 Let u 0 ∈ U solve the min. problem. Assume f , g are C 2 at u 0 and g ′ ( u 0 )( U ) = Y . Then, (i) ∃ l ∈ Y ′ + : f ′ ( u 0 ) = l ◦ g ′ ( u 0 ) and l ( g ( u 0 )) = 0 , where Y ′ + = { l ∈ Y ′ ; ∀ k ∈ K , l ( k ) ≥ 0 } (ii) Set L ( u ) := f ( u ) − l ( g ( u )) . Then F ′′ ( u 0 )( v , v ) ≥ 0 , ∀ v ∈ T u 0 , � v ∈ U ; f ′ ( u 0 )( v ) = 0 , T u 0 = g ′ ( u 0 )( v ) ∈ K g ( u 0 ) = { K + λ g ( u 0 ); λ ∈ ❘ } � . J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) Ioffe A. D - Tihomirov V. M. , Maurer H. - Zowe J. Abstract setting: U , Y real Banach, ∅ � = K ⊂ Y closed convex cone, f : U → ❘ , g : U → Y , min { f ( u ) , u ∈ U , g ( u ) ∈ K } . Proposition 0.4 Let u 0 ∈ U solve the min. problem. Assume f , g are C 2 at u 0 and g ′ ( u 0 )( U ) = Y . Then, (i) ∃ l ∈ Y ′ + : f ′ ( u 0 ) = l ◦ g ′ ( u 0 ) and l ( g ( u 0 )) = 0 , where Y ′ + = { l ∈ Y ′ ; ∀ k ∈ K , l ( k ) ≥ 0 } (ii) Set L ( u ) := f ( u ) − l ( g ( u )) . Then F ′′ ( u 0 )( v , v ) ≥ 0 , ∀ v ∈ T u 0 , � v ∈ U ; f ′ ( u 0 )( v ) = 0 , T u 0 = g ′ ( u 0 )( v ) ∈ K g ( u 0 ) = { K + λ g ( u 0 ); λ ∈ ❘ } � . J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: optimality conditions (remarks) U = H 1 ( ❚ ), Y = H − 1 ( ❚ ) × H 1 ( ❚ ) × H 1 ( ❚ ), K = Y + , g ( u ) = ( u ′′ + u , u − a , b − u ) Easy to find � � ζ 0 d ( v ′′ + v ) ≥ 0 , for all v ′′ + v ≥ 0 ζ 0 d ( u ′′ 0 + u 0 ) = 0 , ❚ ❚ We find that ζ 0 satisfies furthermore ζ 0 ( u ′′ ζ 0 ≥ 0 , 0 + u 0 ) = 0 The second order optimality condition is necessary � p � 2 . Example: Consider G ( u , p ) = − 1 2 u � v � ′ v � ′ u ′ � u ′ � � 0 0 0 = − = u 0 u 0 u 0 u 0 { u ′′ { u ′′ 0 + u 0 > 0 } 0 + u 0 > 0 } Ae B θ u 0 = J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
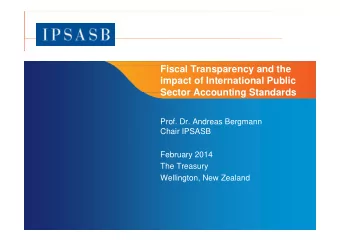
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Proofs: Theorem 0.1 (inclusion in A ( a , b )) 1 a By contradiction ǫ n Case a < u 0 ( θ 0 = 0) < b (Fig. 1) ǫ i n θ 0 ∃ ǫ n → 0, S u 0 ∩ (0 , ǫ n ) � = ∅ 1 b Ω u 0 A ( a , b ) To find v n : ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) We consider v n , i ∈ H 1 ( ❚ ) solving Fig. 1 v ′′ n , i + v n , i = χ ( ǫ i ) ( u ′′ 0 + u 0 ) , (0 , ǫ n ) , n ,ǫ i +1 n (0 , ǫ n ) c . v n , i = 0 , Look for v n = � i =1 , 3 λ n , i v n , i such that n (0 + ) = v ′ v ′ n ( ǫ − n ) = 0, which implies ( v ′′ n + v n ) ≥ λ ( u ′′ 0 + u 0 ) � � � ❚ v n ( ζ 0 + ζ ′′ 0 ) = ❚ v n d µ a = ❚ v n d µ b = 0, and � 2 G uu v 2 j ′′ ( u 0 )( v n , v n ) = n + 2 G up v n v ′ n + G pp v ′ 0 ≤ n ❚ ( � v n � L 2 ( ❚ ) ≤ √ ǫ n � v ′ � n | 2 < 0 ≤ ( o (1) − K pp ) | v ′ (!) n � L 2 ( ❚ ) ) ❚ J. Lamboley, A. Novruzi Polygons as solutions to shape optimization problems with convexit
Recommend
![The Touring Polygons Problem (TPP) [Dror-Efrat-Lubiw-M]: Given a sequence of k polygons in the](https://c.sambuz.com/895801/the-touring-polygons-problem-tpp-s.webp)




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.