Planning and Optimization November 7, 2018 D8. M&S: Strategies - PowerPoint PPT Presentation
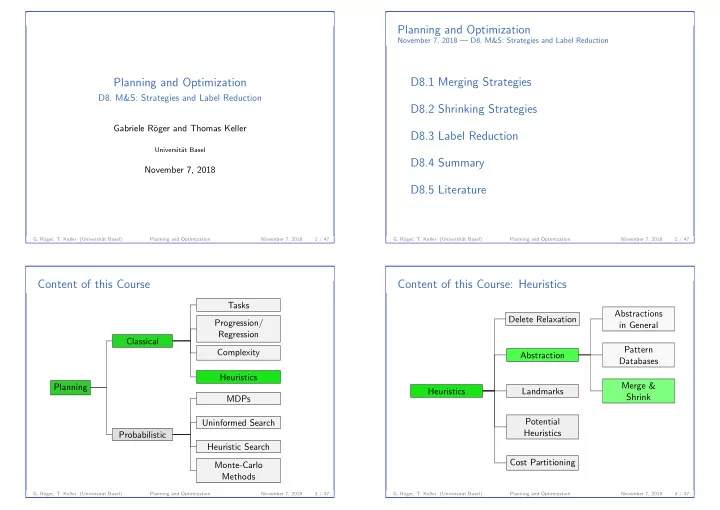
Planning and Optimization November 7, 2018 D8. M&S: Strategies and Label Reduction D8.1 Merging Strategies Planning and Optimization D8. M&S: Strategies and Label Reduction D8.2 Shrinking Strategies Gabriele R oger and Thomas
Planning and Optimization November 7, 2018 — D8. M&S: Strategies and Label Reduction D8.1 Merging Strategies Planning and Optimization D8. M&S: Strategies and Label Reduction D8.2 Shrinking Strategies Gabriele R¨ oger and Thomas Keller D8.3 Label Reduction Universit¨ at Basel D8.4 Summary November 7, 2018 D8.5 Literature G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 1 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 2 / 47 Content of this Course Content of this Course: Heuristics Tasks Abstractions Delete Relaxation Progression/ in General Regression Classical Pattern Complexity Abstraction Databases Heuristics Merge & Planning Heuristics Landmarks Shrink MDPs Potential Uninformed Search Heuristics Probabilistic Heuristic Search Cost Partitioning Monte-Carlo Methods G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 3 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 4 / 47
D8. M&S: Strategies and Label Reduction Merging Strategies D8. M&S: Strategies and Label Reduction Merging Strategies Content of this Course: Merge & Shrink Synchronized Product D8.1 Merging Strategies Merge & Shrink Algorithm Merge & Shrink Heuristic Properties Strategies Label Reduction G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 5 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 6 / 47 D8. M&S: Strategies and Label Reduction Merging Strategies D8. M&S: Strategies and Label Reduction Merging Strategies Generic Algorithm Template Linear Merging Strategies Generic M&S computation algorithm abs := {T π { v } | v ∈ V } Linear Merging Strategy while abs contains more than one abstract transition system: In each iteration after the first, choose the abstraction computed select A 1 , A 2 from abs in the previous iteration as A 1 . shrink A 1 and/or A 2 until size ( A 1 ) · size ( A 2 ) ≤ N abs := abs \ {A 1 , A 2 } ∪ {A 1 ⊗ A 2 } Rationale: only maintains one “complex” abstraction at a time return the remaining abstract transition system in abs � Fully defined by an ordering of atomic projections. Remaining question: ◮ Which abstractions to select? � merging strategy G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 7 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 8 / 47
D8. M&S: Strategies and Label Reduction Merging Strategies D8. M&S: Strategies and Label Reduction Merging Strategies Linear Merging Strategies: Choosing the Ordering Non-linear Merging Strategies ◮ Non-linear merging strategies only recently gained more interest in the planning community. Use similar causal graph criteria as for growing patterns. ◮ One reason: Better label reduction techniques (later in this chapter) enabled a more efficient computation. Example: Strategy of h HHH ◮ Examples: h HHH : Ordering of atomic projections ◮ DFP: preferrably merge transition systems that must ◮ Start with a goal variable. synchronize on labels that occur close to a goal state. ◮ UMC and MIASM: Build clusters of variables with strong ◮ Add variables that appear in preconditions of operators interactions and first merge variables within each cluster. affecting previous variables. ◮ Each merge-and-shrink heuristic computed with a non-linear ◮ If that is not possible, add a goal variable. merging strategy can also be computed with a linear merging Rationale: increases h quickly strategy. ◮ However, linear merging can require a super-polynomial blow-up of the final representation size. G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 9 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 10 / 47 D8. M&S: Strategies and Label Reduction Shrinking Strategies D8. M&S: Strategies and Label Reduction Shrinking Strategies Content of this Course: Merge & Shrink Synchronized Product D8.2 Shrinking Strategies Merge & Shrink Algorithm Merge & Shrink Heuristic Properties Strategies Label Reduction G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 11 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 12 / 47
D8. M&S: Strategies and Label Reduction Shrinking Strategies D8. M&S: Strategies and Label Reduction Shrinking Strategies Generic Algorithm Template Shrinking Strategies Generic M&S computation algorithm abs := {T π { v } | v ∈ V } while abs contains more than one abstraction: How to shrink an abstraction? select A 1 , A 2 from abs shrink A 1 and/or A 2 until size ( A 1 ) · size ( A 2 ) ≤ N We cover two common approaches: abs := abs \ {A 1 , A 2 } ∪ {A 1 ⊗ A 2 } ◮ f -preserving shrinking return the remaining abstraction in abs ◮ bisimulation-based shrinking N : parameter bounding number of abstract states Remaining Questions: ◮ Which abstractions to select? � merging strategy ◮ How to shrink an abstraction? � shrinking strategy G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 13 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 14 / 47 D8. M&S: Strategies and Label Reduction Shrinking Strategies D8. M&S: Strategies and Label Reduction Shrinking Strategies f -preserving Shrinking Strategy Bisimulation f -preserving Shrinking Strategy Repeatedly combine abstract states with identical abstract goal distances ( h values) and Definition (Bisimulation) identical abstract initial state distances ( g values). Let T = � S , L , c , T , s 0 , S ⋆ � be a transition system. An equivalence relation ∼ on S is a bisimulation for T if for every � s , ℓ, s ′ � ∈ T Rationale: preserves heuristic value and overall graph shape and every t ∼ s there is a transition � t , ℓ, t ′ � ∈ T with t ′ ∼ s ′ . Tie-breaking Criterion A bisimulation ∼ is goal-respecting if s ∼ t implies that either Prefer combining states where g + h is high. s , t ∈ S ⋆ or s , t �∈ S ⋆ . In case of ties, combine states where h is high. Rationale: states with high g + h values are less likely to be explored by A ∗ , so inaccuracies there matter less G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 15 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 16 / 47
D8. M&S: Strategies and Label Reduction Shrinking Strategies D8. M&S: Strategies and Label Reduction Shrinking Strategies Bisimulation: Example Bisimulations as Abstractions o Theorem (Bisimulations as Abstractions) 2 Let T = � S , L , c , T , s 0 , S ⋆ � be a transition system and ∼ be a ∼ with equivalence classes o o bisimulation for T . Then α ∼ : S → { [ s ] ∼ | s ∈ S } with p o {{ 1 , 2 , 5 } , { 3 , 4 }} is a α ∼ ( s ) = [ s ] ∼ is an abstraction of T . p q goal-respecting 1 3 5 bisimulation. Note: [ s ] ∼ denotes the equivalence class of s . o Note: Surjectivity follows from the definition of the codomain q p 4 Note: as the image of α ∼ . G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 17 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 18 / 47 D8. M&S: Strategies and Label Reduction Shrinking Strategies D8. M&S: Strategies and Label Reduction Shrinking Strategies Abstractions as Bisimulations Abstraction as Bisimulations: Example Abstraction α with α (1) = α (2) = α (5) = A and α (3) = α (4) = B is a goal-respecting bisimulation for T . Definition (Abstraction as Bisimulation) Let T = � S , L , c , T , s 0 , S ⋆ � be a transition system and α : S → S ′ o be an abstraction of T . The abstraction induces the equivalence T 2 T α relation ∼ α as s ∼ α t iff α ( s ) = α ( t ). o o We say that α is a (goal-respecting) bisimulation for T if ∼ α is a o p o p (goal-respecting) bisimulation for T . p q 1 3 5 A B o , q o q p 4 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 19 / 47 G. R¨ oger, T. Keller (Universit¨ at Basel) Planning and Optimization November 7, 2018 20 / 47
Recommend


















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.