Perturbation of the expected Minkowski functional and its - PowerPoint PPT Presentation
Perturbation of the expected Minkowski functional and its applications Satoshi Kuriki (ISM) T. Matsubara (High Energy Accelerator Res. Org.) Wed 9 October 2019 2nd ISM-UUlm WS at Villa Eberhardt, Ulm 1 / 29 Contents of talk I. Smooth
Perturbation of the expected Minkowski functional and its applications Satoshi Kuriki (ISM) T. Matsubara (High Energy Accelerator Res. Org.) Wed 9 October 2019 2nd ISM-UUlm WS at Villa Eberhardt, Ulm 1 / 29
Contents of talk I. Smooth isotropic random field and Minkowski functional II. Expectation of the Minkowski functional under skewness III. Numerical studies 2 / 29
Contents of talk I. Smooth isotropic random field and Minkowski functional II. Expectation of the Minkowski functional under skewness III. Numerical studies 3 / 29
Smooth isotropic random field ▶ Isotropic random field X ( t ) , t ∈ E ⊂ R n : for any P ∈ O ( n ) and b ∈ R n , d { } { } X ( t ) = X ( Pt + b ) t ∈ E ′ ⊂ R n , t ∈ E ′ ⊂ R n where E ′ is any finite set of E . ▶ We assume that t �→ X ( t ) is smooth. x 0.0 0.2 0.4 0.6 0.8 1.0 1.0 0.0 0.8 0.2 0.6 0.4 y y 0.4 0.6 0.2 0.8 0.0 1.0 0.0 0.2 0.4 0.6 0.8 1.0 reflected x 4 / 29
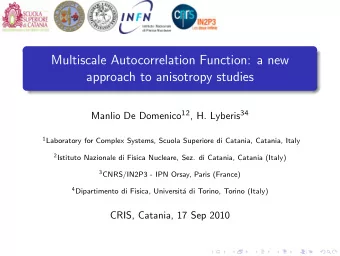
Excursion set ▶ The sup-level set of a function X ( t ) on E : E v = { t ∈ E | X ( t ) ≥ v } = X − 1 ([ v, ∞ )) is referred to as the excursion set. ▶ By changing the level (threshold) v , we have a filtration. 1.0 1.0 0.8 0.8 0.6 0.6 y y 0.4 0.4 0.2 0.2 0.0 0.0 0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0 x x Original RF Excursion set 5 / 29
� Minkowski functional (MF) ▶ Let M ⊂ R n be a closed set. Tube about M with radius ρ : { x ∈ R n | dist( x, M ) ≤ ρ } Tube( M, ρ ) = ▶ Steiner’s formula (Schneider, 2013): For small ρ > 0 , n ( n ) ∑ ρ j Vol n (Tube( M, ρ )) = M j ( M ) j j =0 where M j ( M ) is the j -th Minkowski functional of M ▶ The Euler characteristic (EC) of M is χ ( M ) = M n ( M ) /ω n (Gauss-Bonnet theorem) 6 / 29
MF of the excursion set E v as a test statistic ▶ From now on, we consider the Minkowski functional M j ( E v ) of the excursion set E v . M j ( E v ) can be used as a statistic for testing Gaussianity. v v Gaussian non-Gaussian — χ ( E v ) — E [ χ ( E v )] under the assumption of Gaussianity 7 / 29
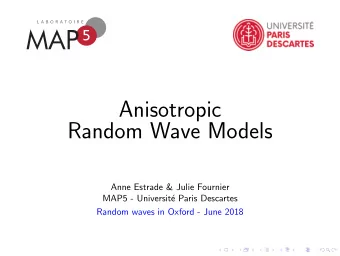
Applications in cosmology: Cosmic Random field ▶ Cosmic microwave background (CMB) (mode: 160.2GHz) http://planck.cf.ac.uk/ ▶ Cosmic inflation theory: (normalized) density: X ( t ) = ϕ ( t )+ a 2 ϕ 2 ( t )+ a 3 ϕ 3 ( t )+ · · · , t ∈ R 3 ϕ ( t ) : isotropic Gaussian field, ϕ 2 ( t ) = ∫ ϕ ( s ) ϕ ( t ) K ( s − t )d s , etc. 8 / 29
Isotropic “Gaussian” random field ? ▶ For k ≥ 2 , cum( X ( t 1 ) , . . . , X ( t k )) = O ( σ k − 2 ) ( σ ≪ 1) (Decay order is the same as the CLT) ▶ Many versions of the inflation models exist. Some of them claim Gaussianity (i.e., a i ≈ 0 ), and some of them claim non-Gaussianity. ▶ In astronomy, E [ M j ( E v )] is evaluated under each model, and is compared with the CMB observation. 9 / 29
Expected Euler characteristic method ▶ The expected EC of the excursion set is used for the approximation of the upper tail probability of the maximum of the random field: ( ) [ ] [ ] Pr sup X ( t ) ≥ v ≈ E χ ( E v ) = E M n ( E v ) /ω n t ∈ E (Adler & Taylor, 2007; Takemura & Kuriki, 2002) ▶ This gives a p-value of the VBM data (installed in SPM): http://www.math.mcgill.ca/keith/ ▶ The purpose of this talk: To provide the formula for E [ M j ( E v )] when X ( · ) is not Gaussian. 10 / 29
Contents of talk I. Smooth isotropic random field and Minkowski functional II. Expectation of the Minkowski functional under skewness III. Numerical studies 11 / 29
2- and 3-point correlation ▶ The correlation functions of an isotopic random field depend only on the pairwise distances: E [ X ( s )] = 0 ( 1 2 ∥ s − t ∥ 2 ) E [ X ( s ) X ( t )] = ρ , ρ (0) = 1 ( 1 2 ∥ s − t ∥ 2 , 1 2 ∥ s − u ∥ 2 , 1 2 ∥ t − u ∥ 2 ) E [ X ( s ) X ( t ) X ( u )] = κ κ ( x, y, z ) is symmetric wrt x, y, z . ▶ We assume κ ≈ 0 but κ ̸ = 0 (skewness ̸ = 0 ) 12 / 29
Moving average field of a Levy measure ▶ Suppose that X ( t ) is generated as the Levy measure as ∫ ( 1 2 ∥ t − s ∥ 2 ) X ( t ) = R n g Y ( ds ) , where Y ( ds ) is a Levy measure on R n with the moment structures: E [ Y ( ds )] = 0 cum( Y ( ds ) , Y ( ds ′ )) = δ ( s − s ′ ) ds cum( Y ( ds ) , Y ( ds ′ ) , Y ( ds ′′ )) = κ 0 · δ ( s − s ′ ) δ ( s − s ′′ ) ds ▶ When κ 0 ̸ = 0 but | κ 0 | ≪ 1 , X ( t ) is a non-Gaussian isometric field with weak skewness. ▶ cum( X ( s ) , X ( t ) , X ( u )) is shown to be a symmetric function in ∥ s − t ∥ , ∥ s − u ∥ , ∥ t − u ∥ (not trivial). 13 / 29
Expected Minkowski functional under skewness Theorem Suppose that X ( t ) is a zero mean, variance one smooth isotropic random field on E ⊂ R n with covariance function ρ and 3-point correlation function κ . Then E [ M j ( E v )] = | E | γ j/ 2 2 − j/ 2 Γ( n − j + 1) [ 2 × φ ( v ) h j − 1 ( v ) Γ( n 2 + 1) + 2 − 1 γ − 2 κ 11 j ( j − 1) h j − 2 ( v ) − 2 − 1 γ − 1 κ 1 jh j ( v ) ] + 6 − 1 κ 0 h j +2 ( v ) + o ( κ ) , j = 1 , . . . , n, where φ ( x ) : pdf of N (0 , 1) , h n ( x ) : Hermite poly., γ = − ρ ′ (0) , | x =0 , κ 11 = d 2 κ ( x,y, 0) κ 0 = κ (0 , 0 , 0) , κ 1 = d κ ( x, 0 , 0) | x = y =0 . d x d x d y ▶ The Gaussian case ( κ ≡ 0 ) is well known (Tomita, 1986). ▶ The case of n = 2 , 3 was proved by Matsubara (2003). 14 / 29
Derivatives of ρ and κ in the moving average field ▶ For the moving average field ∫ ( 1 2 ∥ t − s ∥ 2 ) X ( t ) = R n g Y ( ds ) , the derivatives of 2- and 3-correlation functions appearing in the perturbation formula: ∫ ∞ γ = − ρ ′ (0) = Ω n g ′ ( r 2 / 2) 2 r n − 3 dr n 0 ∫ ∞ g ( r 2 / 2) 3 r n − 1 dr � κ 0 = ∂κ ( x, y, x ) 0 = c Ω n � 0 ∫ ∞ κ 1 = ∂κ ( x, y, x ) 0 = − c Ω n � g ( r 2 / 2) g ′ ( r 2 / 2) 2 r n − 3 dr � ∂x n � 0 ∫ ∞ κ 11 = ∂ 2 κ ( x, y, x ) Ω n � g ′ ( r 2 / 2) 2 g ′′ ( r 2 / 2) r n − 5 dr 0 = c � ∂x∂y n ( n + 2) � 0 15 / 29
Outline of the Proof of the Theorem Step 0. Represent the Minkowski functional M j ( E v ) in terms of ( X ( t ) , ∇ X ( t ) , ∇ 2 X ( t )) ∈ R 1+ n + n ( n +1) / 2 Step 1. Obtain the joint cumulant of ( X ( t ) , ∇ X ( t ) , ∇ 2 X ( t )) Step 2. Obtain the moment generating function of ( X ( t ) , ∇ X ( t ) , ∇ 2 X ( t )) Step 3. Obtain the joint pdf of ( X ( t ) , ∇ X ( t ) , ∇ 2 X ( t )) Step 4. Taking expectation of M j ( E v ) 16 / 29
Proof: Step 0. Minkowski Functional ▶ By taking tube coordinates, the Minkowski Functional is shown to be ∫ 1 n det( − P ⊤ RP + ρ ′ (0) vI j − 1 ) ∥ V ∥ − j +2 × p X ( t ) ( v ) d t M j ( E v ) = E where p X ( t ) is the pdf of X ( t ) , V = ∇ X ( t ) , R = R ( t ) = ∇ 2 X ( t ) − ρ ′ (0) X ( t ) I n and P = P ( t ) is n × ( j − 1) such that P ⊤ P = I j − 1 and P ⊤ ∇ X ( t ) = 0 ▶ That is, M j ( E v ) is represented in terms of ( X ( t ) , ∇ X ( t ) , ∇ 2 X ( t )) ∈ R 1+ n + n ( n +1) / 2 17 / 29
Proof: Step 1. Joint cumulant ▶ Let X i = ∂X ( t ) /∂t i , X ij = ∂ 2 X ( t ) /∂t i ∂t j . ▶ For example, E [ X i X j ] = ∂ ∂ E [ X ( s ) X ( t )] | s = t ∂s i ∂t j = ∂ ∂ ( 1 2 ∥ s − t ∥ 2 ) | s = t = − ρ ′ (0) δ ij ρ ∂s i ∂t j ▶ Similarly, E [ X i X j ] = − ρ ′ (0) δ ij E [ XX ij ] = ρ ′ (0) δ ij E [ XX ] = 1 E [ X ij X kl ] = ρ ′′ (0)( δ ij δ kl + δ ik δ jl + δ il δ jk ) E [ XXX ] = κ 0 E [ XX i X j ] = − κ 1 δ ij E [ XXX ij ] = 2 κ 1 δ ij E [ XX ij X kl ] = (3 κ 11 + κ 2 ) δ ij δ kl + κ 2 ( δ ik δ jl + δ il δ jk ) E [ X i X j X kl ] = − 2 κ 11 δ ij δ kl + κ 11 ( δ ik δ jl + δ il δ jk ) E [ X ij X kl X mn ] = (2 κ 111 + 6 κ 21 ) δ ij δ kl δ mn + 2 κ 21 ( δ ik δ jl + δ il δ jk ) δ mn [3] + ( − κ 111 ) δ il δ jn δ km [8] 18 / 29
Proof: Step 2. Moment generating function ▶ Moment generating function of X = X ( t ) , V = ∇ X ( t ) , R = ∇ 2 X ( t ) − ρ ′ (0) X ( t ) I n : [ ] exp { tX + ⟨ T, V ⟩ + tr(Θ R ) } E { t 2 2 + − ρ ′ (0) ∥ T ∥ 2 + α 2 tr(Θ 2 ) + β } 2 tr(Θ) 2 = exp 2 { } × 1 + Q ( t, T, Θ) + · · · where α = 2 ρ ′′ (0) , β = ρ ′′ (0) − ρ ′ (0) 2 ▶ Q ( t, T, Θ) is a linear combination of t 3 , t , ∥ T ∥ 2 , t 2 tr(Θ) , t tr(Θ) 2 , t tr(Θ 2 ) , ∥ T ∥ 2 tr(Θ) , T ⊤ Θ T , tr(Θ) 3 , tr(Θ)tr(Θ 2 ) , tr(Θ 3 ) of the order O (max( | κ 0 | , | κ 1 | , | κ 11 | )) 19 / 29
Proof: Step 3. Joint pdf ▶ By inverting the moment generating function, we have the pdf of X = X ( t ) , V = ∇ X ( t ) , R = ∇ 2 X ( t ) − ρ ′ ( t ) X ( t ) I n : { } p ( X, V, R ) = φ ( X ) p 0 V ( V ) p 0 R ( R ) 1 + q ( X, V, R ) + · · · φ ( X ) : pdf of N (0 , 1) , p 0 V ( V ) : pdf of N n (0 , − ρ ′ (0) I n ) − 1 β { 2 α ( α + nβ )tr( R ) 2 } 2 α tr( R 2 ) + p R ( R ) ∝ exp where α = 2 ρ ′′ (0) , β = ρ ′′ (0) − ρ ′ (0) 2 ▶ q ( X, V, R ) is a linear combination of h 1 ( X ) , h 3 ( X ) , tr( R ) , h 2 ( X )tr( R ) , h 1 ( X ) ∥ V ∥ 2 , ∥ V ∥ 2 tr( R ) , V ⊤ RV , h 1 ( X )tr( R ) 2 , h 1 ( X )tr( R 2 ) , tr( R ) 3 , tr( R )tr( R 2 ) , tr( R 3 ) of the order O (max( | κ 0 | , | κ 1 | , | κ 11 | )) 20 / 29
Recommend


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.