Bijection 2: minimal accessible orientated map ← → mobiles. Example: controlled explosion 6 8 8 6 2 2 3 3 7 7 4 1 1 5 4 5 Lemma: No loss of information in separation of tree and mobile. Proof: k th vertex of tree is glued to k th white corner of mobile.
Bijection 2: minimal accessible orientated map ← → mobiles. Thm: [B. 07] The controlled explosion is a bijection between • minimal accessible oriented maps with n edges, • pairs of rooted plane trees with n and n + 1 edges. Example: tree of left-paths mobile
Summary map + minimal accessible orientation map + spanning tree mobile + tree of left-paths
Summary map + minimal accessible orientation map + spanning tree mobile + tree of left-paths General scheme of Shaeffer type bijection (for a class of maps): 1. Identify a canonical minimal accessible orientation. 2. Associate spanning-tree + decoration or Mobile + decoration .
Summary map + minimal accessible orientation map + spanning tree mobile + tree of left-paths General scheme of Shaeffer type bijection (for a class of maps): 1. Identify a canonical minimal accessible orientation. 2. Associate spanning-tree + decoration or Mobile + decoration . The art is in finding a good canonical orientation : it should characterize the class of maps and lead to simple decorations.
Additional remarks 1. Tree of left-paths can be encoded by either children-code, height-code, dual children-code . . . 2 2 1 1 2 0 3 children-code height-code dual children-code
Additional remarks 1. Tree of left-paths can be encoded by either children-code, height-code, dual children-code . . . 2. The toolbox is self-dual . dual orientation corresponds dual orientation gives to dual spanning tree same mobile and dual tree
Additional remarks 1. Tree of left-paths can be encoded by either children-code, height-code, dual children-code . . . 2. The toolbox is self-dual . controlled explosion controlled explosion
Additional remarks 1. Tree of left-paths can be encoded by either children-code, height-code, dual children-code . . . 2. The toolbox is self-dual . 3. The toolbox has a nice extension to other orientations . case of acyclic orientations extends into a bijection with several sources orientations ← → subgraphs [B. 08] arxiv:0612003
Additional remarks 1. Tree of left-paths can be encoded by either children-code, height-code, dual children-code . . . 2. The toolbox is self-dual . 3. The toolbox has a nice extension to other orientations . 4. The toolbox has a nice extension to higher genus . [B., Chapuy 10] arxiv:1001.1592
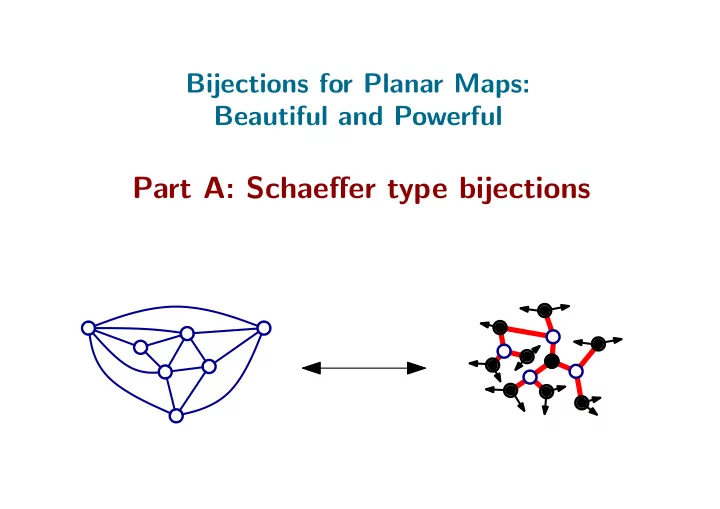
A.III The Cori-Vauquelin/Schaeffer’s bijection as a specialization of the Tree-rooted map bijection
Quadrangulation Def. A quadrangulation is a map with faces of degree 4.
Quadrangulation Def. A quadrangulation is a map with faces of degree 4. Prop. A quadrangulation is bipartite .
Quadrangulation Def. A quadrangulation is a map with faces of degree 4. Prop. A quadrangulation is bipartite . Proof. Any face has even degree. ⇒ Any cycle has even length. ⇒ The map is bipartite.
Quadrangulation Def. A quadrangulation is a map with faces of degree 4. 2 1 2 3 2 0 1 2 Prop. A quadrangulation is bipartite . Cor. The distance from root-vertex changes by ± 1 across each edge (never 0).
Geodesic orientation Def. Geodesic orientation = orient every edge away from root-vertex. 2 1 3 2 2 2 0 1
Geodesic orientation Def. Geodesic orientation = orient every edge away from root-vertex. 2 1 3 2 2 2 0 1 Remark. The geodesic orientation is minimal accessible.
Mobile obtained from the geodesic orientation 2 1 3 2 2 2 0 1
Mobile obtained from the geodesic orientation 2 1 3 2 2 2 0 1 Remark. Every black vertex of the mobile has degree 2. (except for root-face)
Mobile obtained from the geodesic orientation 2 1 3 2 2 2 0 1 Remark. Every black vertex of the mobile has degree 2. (except for root-face) Remark. All the left-paths (in fact, all directed paths) are geodesics. Hence, distance labels = height code of trees of left-paths.
Mobile obtained from the geodesic orientation 2 2 1 1 3 3 2 2 2 2 2 2 0 1 0 1 Def. Well-labeled trees = tree with positive labels such that root has label 1 and label differ by 0,1, or − 1 along edges. Thm [Shaeffer 98]. The above construction is a bijection between quadrangulations ( n vertices) and well-labeled trees ( n − 1 vertices).
Additional remarks 1. The above construction extends to bipartite maps : it recovers [Bouttier, Di Francesco, Guitter 04]. 2 2 1 3 2 1 3 2 2 2 2 0 1 0 1 2
Additional remarks 1. The above construction extends to bipartite maps : it recovers [Bouttier, Di Francesco, Guitter 04]. 2. The above construction extends to higher genus surfaces [Marcus Schaeffer 98/Chapuy Marcus Schaeffer 08]
A.IV The master bijection framework
A few bijections • Triangulations ( 2 n faces) 2 n � 3 n 1 � 4 n − 2 � � Simple: Loopless: ( n + 1)(2 n + 1) n (2 n − 1) n − 1 n [ Poulalhon, Schaeffer 02 ] [Poulalhon, Schaeffer 06 Fusy, Poulalhon, Schaeffer 08 ] • Quadrangulations ( n faces) � 3 n 2 · 3 n � 2 n 2 � � General: Simple: ( n + 1)( n + 2) n n ( n + 1) n − 1 [Schaeffer 97, Schaeffer 98 ] [ Schaeffer 98 , Fusy 07] • Bipartite maps ( n i faces of degree 2 i ) 2 · ( � i n i )! � n i 1 � 2 i − 1 � (2 + � ( i − 1) n i )! n i ! i i [Schaeffer 97, Bouttier, Di Francesco, Guitter 04 ]
A few bijections Girth 4 3 2 1 Degree of the faces 6 7 8 1 2 3 4 5
Goal: Find a master bijection for planar maps which unifies all known bijections (of red type).
Goal: Find a master bijection for planar maps which unifies all known bijections (of red type). Strategy: 1. Define a master bijection between a class of oriented maps and a class of decorated trees . 2. Define canonical orientations for maps in any class defined by degree and girth constraints.
Goal: Find a master bijection for planar maps which unifies all known bijections (of red type).
Goal: Find a master bijection for planar maps which unifies all known bijections (of red type). Alternative strategies: • Bijections of the blue type [Albenque, Poulalhon 15] Same orientation. Encodes the map by “spanning tree with buds”.
Goal: Find a master bijection for planar maps which unifies all known bijections (of red type). Alternative strategies: • Bijections of the blue type [Albenque, Poulalhon 15] Same orientation. Encodes the map by “spanning tree with buds”. • Recursive decomposition by slices [Bouttier, Guitter 14] Direct cutting of the map. Same orientation (?).
Oriented maps A plane map is a planar map with a distinguished “external face”. external face external vertices
Oriented maps A plane map is a planar map with a distinguished “external face”. external face external vertices Let O be the set of oriented plane maps such that: • there is no counterclockwise directed cycle ( minimal ), • internal vertices can be reached from external vertices ( accessible ), • external vertices have indegree 1.
Mobiles A mobile is a plane tree with vertices properly colored in black and white, together with buds (arrows) incident only to black vertices.
Master bijection Mapping Φ for an oriented map in O : • Return the external edges. • Place a black vertex in each internal face. Draw an edge/bud for each clockwise/counterclockwise edge. • Erase the map.
Master bijection Theorem [B.,Fusy]: The mapping Φ is a bijection between the set O of oriented maps and the set of mobiles with more buds than edges. Moreover, indegree of internal vertices ← → degree of white vertices degree of internal faces ← → degree of black vertices degree of external face ← → #buds - #edges
Canonical orientations
Goal: C = class of maps defined by girth constraints and degree constraints. We want to define a canonical orientation in O for each map in C Girth C 4 3 2 1 Degree of faces 6 7 1 2 3 4 5
How to define a canonical orientation? We consider a plane map M and want to define an orientation in O (orientations which are minimal + accessible + external indegree 1).
How to define a canonical orientation? We consider a plane map M and want to define an orientation in O (orientations which are minimal + accessible + external indegree 1). Fact 1 : Let α be a function from the vertices of M to N . If there is an orientation of M with indegree α ( v ) for each vertex v , then there is unique minimal one. ⇒ Orientations in O can be defined by specifying the indegree α ( v ) .
How to define a canonical orientation? We consider a plane map M and want to define an orientation in O (orientations which are minimal + accessible + external indegree 1). Fact 1 : Let α be a function from the vertices of M to N . If there is an orientation of M with indegree α ( v ) for each vertex v , then there is unique minimal one. ⇒ Orientations in O can be defined by specifying the indegree α ( v ) . Fact 2 : An orientation with indegree α ( v ) exists (and is accessible) if and only if � • α ( v ) = | E | v ∈ V � • ∀ U ⊂ V , α ( v ) ≥ | E U | (strict if there is an external vertex / ∈ U ). v ∈ U
How to define a canonical orientation? We consider a plane map M and want to define an orientation in O (orientations which are minimal + accessible + external indegree 1). Conclusion : For a map G , one can define an orientation in O by specifying an indegree function α such that: � • α ( v ) = | E | , v ∈ V � • ∀ U ⊂ V , α ( v ) ≥ | E U | (strict if an external vertex / ∈ U ), v ∈ U • α ( v ) = 1 for every external vertex v .
How to define a canonical orientation? We consider a plane map M and want to define an orientation in O (orientations which are minimal + accessible + external indegree 1). Conclusion : For a map G , one can define an orientation in O by specifying an indegree function α such that: � • α ( v ) = | E | , v ∈ V � • ∀ U ⊂ V , α ( v ) ≥ | E U | (strict if an external vertex / ∈ U ), v ∈ U • α ( v ) = 1 for every external vertex v . Remark : Specifying indegrees is also convenient for master bijection: indegrees of internal vertices ← → degrees of white vertices.
Example: Simple triangulations Girth 4 3 2 1 Degree of faces 6 7 1 2 3 4 5
Example: Simple triangulations Fact: A triangulation with n internal vertices has 3 n internal edges. Proof: The numbers v , e , f of vertices edges and faces satisfy: • Incidence relation: 3 f = 2 e . • Euler relation: v − e + f = 2 . �
Example: Simple triangulations Fact: A triangulation with n internal vertices has 3 n internal edges. Natural candidate for indegree function: � 3 if v internal � α : v �→ 1 if v external . � � 1 1 3 3 3 3 1
Example: Simple triangulations Thm. [Schnyder 89] A triangulation admits an orientation with indegree function α if and only if it is simple. New proof: Euler relation + the incidence relation ⇒ α satisfies: • � v ∈ V α ( v ) = | E | , • ∀ U ⊂ V , � u ∈ U α ( u ) ≥ | E U | (strict if an external vertex / ∈ U ), • α ( v ) = 1 for every external vertex v . �
Example: Simple triangulations Thm. [Schnyder 89] A triangulation admits an orientation with indegree function α if and only if it is simple. ⇒ The class of simple triangulations is identified with the class of oriented maps in O such that • faces have degree 3 • internal vertices have indegree 3
Example: Simple triangulations Thm. [Schnyder 89] A triangulation admits an orientation with indegree function α if and only if it is simple. ⇒ The class of simple triangulations is identified with the class of oriented maps in O such that • faces have degree 3 • internal vertices have indegree 3 Thm [recovering FuPoSc08]: The master bijection Φ induces a bijection between simple triangulations and mobiles such that • black vertices have degree 3 • white vertices have degree 3
Example: Simple triangulations Thm. [Schnyder 89] A triangulation admits an orientation with indegree function α if and only if it is simple. ⇒ The class of simple triangulations is identified with the class of oriented maps in O such that • faces have degree 3 • internal vertices have indegree 3 Thm [recovering FuPoSc08]: The master bijection Φ induces a bijection between simple triangulations and mobiles such that • black vertices have degree 3 • white vertices have degree 3 Corollary: The number of rooted simple triangulations with 2 n faces � 4 n − 2 � 1 is . n (2 n − 1) n − 1
Orientations for d -angulations of girth d Fact: A d -angulation with ( d − 2) n internal vertices has dn internal edges. Natural candidate for indegree function: � d/ ( d − 2) if v internal � α : v �→ . . . � 1 if v external � d = 5
Orientations for d -angulations of girth d Fact: A d -angulation with ( d − 2) n internal vertices has dn internal edges. Natural candidate for indegree function: � d/ ( d − 2) if v internal � α : v �→ . . . � 1 if v external � 5 5 5 d = 5 5 5 5 Idea: We can look for an orientation of ( d − 2) G with indegree function � d if v internal � α : v �→ 1 if v external . � �
Orientations for d -angulations of girth d Thm [B., Fusy]: Let G be a d -angulation. G has girth d ← → G admits a weighted orientation with • weight d − 2 per edges. • ingoing weight d per internal vertex, • ingoing weight 1 per external vertex. j > 0 i ≤ 0 2 1 j > 0 2 i> 0 1 2 1 i + j = d − 2 2 1
Orientations for d -angulations of girth d Thm [B., Fusy]: Let G be a d -angulation. G has girth d ← → G admits a weighted orientation with • weight d − 2 per edges. • ingoing weight d per internal vertex, • ingoing weight 1 per external vertex. Moreover, G admits a unique such orientation in O in this case. 0 j > 0 i ≤ 0 3 3 0 0 2 1 3 j > 0 2 i> 0 1 2 1 3 0 3 i + j = d − 2 2 1 3 0 0 Proof: Use the Euler relation + incidence relation as before. �
Orientations for maps of girth d Girth 4 3 2 1 Degree of faces 6 7 1 2 3 4 5
Orientations for maps of girth d Thm [B., Fusy]: Let G be a map. G has girth d ← → G admits a weighted bi-orientation with • weight d − 2 per edges. • ingoing weight d per internal vertex, • ingoing weight 1 per external vertex, • clockwise outgoing weight d − deg per faces. Moreover, G admits a unique such orientation in O in this case. 0 3 1 2 0 3 j > 0 0 i ≤ 0 1 2 1 3 -1 4 0 2 3 3 2 0 j > 0 i> 0 1 -1 4 4 1 2 -1 i ≤ 0 j ≤ 0 3 d = 5 0 5 i + j = d − 2 -2
Master bijection for weighted bi-orientation Theorem [B., Fusy] There is a bijection between weighted bi-oriented plane maps in O and weighted mobiles. Moreover, weight of internal edges ← → weight of edges ingoing weight of internal vertices ← → weight of white vertices degree of internal faces ← → degree of black vertices outgoing weight of internal faces ← → weight of black vertices 0 3 3 0 1 2 0 1 2 3 0 3 0 0 4 1 21 3 -14 0 -1 2 1 3 1 3 2 3 2 3 2 0 3 2 0 1 1 -14 -1 0 4 4 -1 1 4 2 1 -1 2 3 30 0 5 5 -2 -2
Canonical orientations + Master bijection Thm [B., Fusy]: There is a bijection between plane maps of girth d and weighted mobiles such that • edges have weight d − 2 , • white vertices have weight d , • black vertices have weight d − deg. Moreover, faces of degree d ← → black vertices of degree d . 0 3 3 0 12 0 1 2 3 0 3 0 0 1 2 4 21 3 -14 0 -1 1 1 3 3 2 3 21 2 3 0 2 3 0 -1 1 -1 4 -14 0 4 4 1 1 2 -1 2 3 30 0 5 -2 5 -2
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries