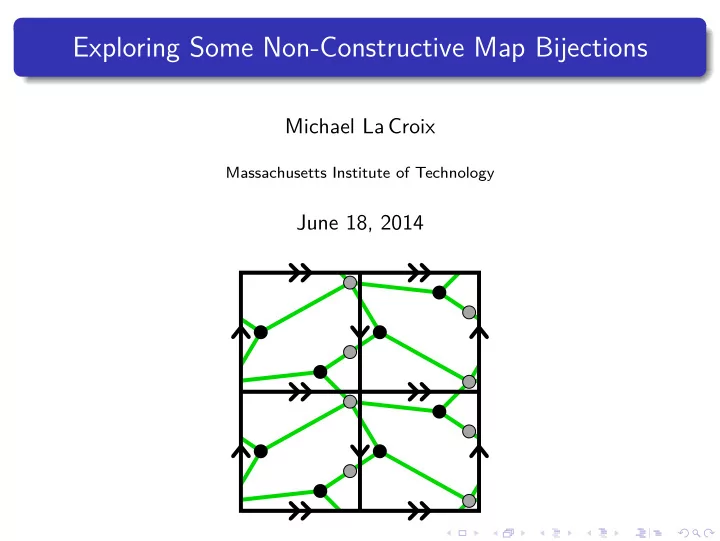
Exploring Some Non-Constructive Map Bijections Michael La Croix Massachusetts Institute of Technology June 18, 2014
Outline Maps and Hypermaps 1 Maps and their symmetries (Duality and 3 Involutions) Encoding a Map Hypermaps and an S 3 Symmetry Generating Series 2 Using symmetric Schur functions and zonal polynomials A Jack generalization Partial Solutions and New Mysteries 3 Quantifying non-orientability Root face degree distribution Duality no longer explains the symmetry The Klein Bottle Summary 4 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 1 / 21
Outline Maps and Hypermaps 1 Maps and their symmetries (Duality and 3 Involutions) Encoding a Map Hypermaps and an S 3 Symmetry Generating Series 2 Using symmetric Schur functions and zonal polynomials A Jack generalization Partial Solutions and New Mysteries 3 Quantifying non-orientability Root face degree distribution Duality no longer explains the symmetry The Klein Bottle Summary 4 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 1 / 21
Graphs, Surfaces, and Maps Definition (Surface) Example A surface is a compact 2 -manifold without boundary. (Non-orientable surfaces are permitted.) Definition (Graph) A graph is a finite set of vertices together with a finite set of edges , such that each edge is associated with either one or two vertices. (It may have loops / parallel edges.) Definition (Map) A map is a 2-cell embedding of a graph in a surface. (It has faces.) Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 1 / 21
Flags and Rooted Maps Example Definition The neighbourhood of the graph is a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 1 / 21
Flags and Rooted Maps Example Definition The neighbourhood of the graph is a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Note There is a map with no edges. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 1 / 21
Vertices and Face A map can be recovered from a neighbourhood of the graph, or from its faces and surgery instructions. Vertex and face degrees are interchanged by duality. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 2 / 21
Duality Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 3 / 21
Three Involutions Three natural involutions reroot a map. Across Edge Around Vertex Along Edge Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 4 / 21
3 Matchings Encode a Map Each involution gives a perfect matching of flags. Pairs of matchings recover vertices, edges, and faces. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 5 / 21
Hypermaps Generalizing the combinatorial encoding, an arbitrary triple of perfect matchings determines a hypermap when the triple induces a connected graph, with cycles of M e ∪ M f , M e ∪ M v , and M v ∪ M f determining vertices, hyperfaces, and hyperedges. Example Hypermaps both specialize and generalize maps. Example → ֒ A hypermap can be represented as a bipartite map. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 6 / 21
Hypermaps Generalizing the combinatorial encoding, an arbitrary triple of perfect matchings determines a hypermap when the triple induces a connected graph, with cycles of M e ∪ M f , M e ∪ M v , and M v ∪ M f determining vertices, hyperfaces, and hyperedges. Example Hypermaps both specialize and generalize maps. Example → ֒ Subdivide edges to get a hypermap from a map. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 6 / 21
An S 3 Action on Hypermaps Every permutation of the matchings gives a hypermap. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 7 / 21
Outline Maps and Hypermaps 1 Maps and their symmetries (Duality and 3 Involutions) Encoding a Map Hypermaps and an S 3 Symmetry Generating Series 2 Using symmetric Schur functions and zonal polynomials A Jack generalization Partial Solutions and New Mysteries 3 Quantifying non-orientability Root face degree distribution Duality no longer explains the symmetry The Klein Bottle Summary 4 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 8 / 21
The Hypermap Series Definition The hypermap series for a set H of hypermaps is the combinatorial sum � x ν ( h ) y φ ( h ) z ǫ ( h ) H ( x , y , z ) := h ∈H ν ( h ) , φ ( h ) , and ǫ ( h ) are vertex-, hyperface-, and hyperedge- degrees. Example ν = [2 3 , 3 2 ] ǫ = [2 6 ] φ = [3 , 4 , 5] � ( y 3 y 4 y 5 ) � x 3 2 x 2 � z 6 � . contributes 12 3 2 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 8 / 21
Explicit Generating Series Some hypermap series can be computed explicitly. Theorem (Jackson and Visentin - 1990) Derivation When H is the set of orientable hypermaps, � = t ∂ � � � t | θ | H θ s θ ( x ) s θ ( y ) s θ ( z ) � � H O p ( x ) , p ( y ) , p ( z ); 0 ∂ t ln � � θ ∈ P � t =1 . Theorem (Goulden and Jackson - 1996) Derivation When H is the set of all hypermaps (orientable and non-orientable), � = 2 t ∂ t | θ | 1 � � � � � H A p ( x ) , p ( y ) , p ( z ); 1 ∂ t ln Z θ ( x ) Z θ ( y ) Z θ ( z ) � H 2 θ � θ ∈ P � t =1 . Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 9 / 21
A Generalized Series Definition . A common generalization involves Jack symmetric functions, b -Conjecture (Goulden and Jackson - 1996) � � H p ( x ) , p ( y ) , p ( z ); b � t | θ | J (1+ b ) ( x ) J (1+ b ) ( y ) J (1+ b ) ( z ) := (1 + b ) t ∂ � � θ θ θ � ∂ t ln � � J θ , J θ � 1+ b [ p 1 | θ | ] J θ � θ ∈ P � t =1 � � = c ν,φ,ǫ ( b ) p ν ( x ) p φ ( y ) p ǫ ( z ) , n ≥ 0 ν,φ,ǫ ⊢ n b β ( h ) for some β . � enumerates rooted hypermaps with c ν,φ,ǫ ( b ) = h ∈H ν,φ,ǫ Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 10 / 21
Properties of β The function β ( h ) should: 1 be zero for orientable hypermaps, 2 be positive for non-orientable hypermaps, 3 be bounded by cross-cap number, 4 depend on rooting , 5 measure departure from orientability. Example Rootings of precisely three maps are enumerated by c [4] , [4] , [2 2 ] ( b ) = 1 + b + 3 b 2 . 2 b 2 b + b 2 1 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 11 / 21
Properties of β The function β ( h ) should: 1 be zero for orientable hypermaps, 2 be positive for non-orientable hypermaps, 3 be bounded by cross-cap number, 4 depend on rooting, 5 measure departure from orientability (probably). Example There are precisely eight rooted maps enumerated by c [4 , 4] , [3 , 5] , [2 4 ] ( b ) = 8 b 2 . Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 11 / 21
Outline Maps and Hypermaps 1 Maps and their symmetries (Duality and 3 Involutions) Encoding a Map Hypermaps and an S 3 Symmetry Generating Series 2 Using symmetric Schur functions and zonal polynomials A Jack generalization Partial Solutions and New Mysteries 3 Quantifying non-orientability Root face degree distribution Duality no longer explains the symmetry The Klein Bottle Summary 4 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 12 / 21
We can quantify departure from orientability? A Duck is a Duck is a Duck Rabbit Duck Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 12 / 21
Root Edge Deletion A rooted map with k edges can be thought of as a sequence of k maps. 2 n 2 n 2 2 2 ab b bn n 2 2 abn abn an n Consecutive submaps differ in genus by 0, 1, or 2, and these steps are marked by 1 , b , and a to assign a weight to a rooted map. Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 13 / 21
A partial interpretation � x | V ( m ) | y φ ( m ) � r ( m ) z | E ( m ) | r ρ ( m ) a τ ( m ) b η ( m ) , M = M ( x , y , z , r ; a , b ) := m ∈M Satisfies the PDE Why? i +1 ∂ ∂ � � � M = r 0 x + b z ( i + 1) r i +2 M + z r j y i − j +2 M ∂ r i ∂ r i j =1 i ≥ 0 i ≥ 0 � ∂ � � � ∂ 2 ∂ � � + 2 a z jr i + j +2 M + z r i + j +2 M M . ∂ r i ∂ y j ∂ r i ∂ r j i , j ≥ 0 i , j ≥ 0 With a = 1 2 (1 + b ) and x = N , so does √ p k ( λ ) ∂ � � z k 2(1+ b ) p 2 ( λ ) d λ . 1 k (1+ b ) y k 2 1+ b e − � M = (1+ b ) ln R N e k ≥ 1 | V ( λ ) | jr j ∂ y j j ≥ 0 Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 14 / 21
We can track the degree of the root face To guess the integral form, we had to replace 2 z ∂ ∂ � ∂ z with jr j . ∂ y j j ≥ 0 This means that among all maps with a given set of face degrees, ( τ, η ) and root-face degree are independently distributed. For b = 0 and b = 1 this is a consequence of the re-rooting involutions. Question Why does this work for arbitrary b ? Michael La Croix (MIT) Non-Constructive Map Bijections June 18, 2014 15 / 21
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries