PALADYN The construction of humanoid robotic head Krzysztof Luks, - PowerPoint PPT Presentation
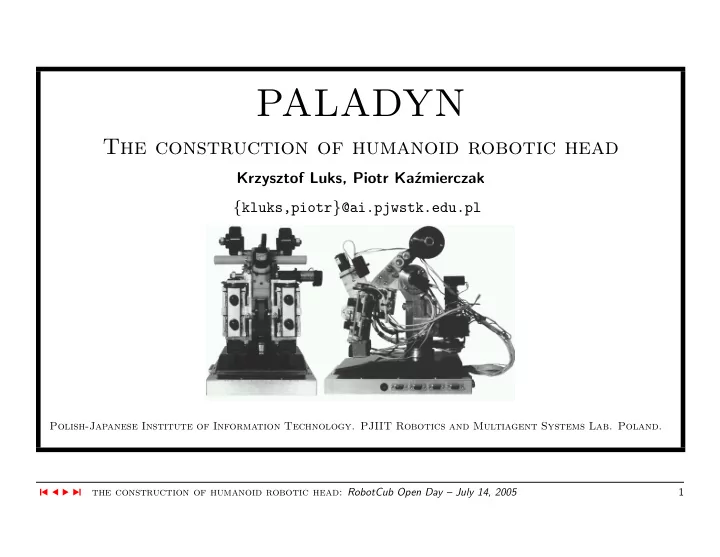
PALADYN The construction of humanoid robotic head Krzysztof Luks, Piotr Ka zmierczak { kluks,piotr } @ai.pjwstk.edu.pl Polish-Japanese Institute of Information Technology. PJIIT Robotics and Multiagent Systems Lab. Poland. 1 the
PALADYN The construction of humanoid robotic head Krzysztof Luks, Piotr Ka´ zmierczak { kluks,piotr } @ai.pjwstk.edu.pl Polish-Japanese Institute of Information Technology. PJIIT Robotics and Multiagent Systems Lab. Poland. µ ¶ · ¸ 1 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
PRESENTATION OUTLINE ❶ HARDWARE OVERVIEW ❻ BINAURAL SYSTEM DESIGN ❷ SOFTWARE OVERVIEW ❼ MATCHING EYE MOVEMENTS ❹ DRIVER ARCHITECTURE ❽ VOLUNTARY EYE MOVEMENTS ❸ DATA ACQUISITION SCHEME ❾ PREATTENTIVE CUES ❺ BINAURAL LOCALISATION ❿ FUTURE WORK µ ¶ · ¸ 2 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
HARDWARE OVERVIEW • 5 DoF, based on early Cog design, avoid using custom boards • Visual, auditory, vestibular and control • 4 CCD cameras: ImagingSource DFM 5303P and BT878 based PXC-200F framegrabbers • Microphones with low-noise pre-amplifier • 3 axis accelerometer/gyro & NuDAQ 9112 A/D • Motion control: Galil DMC-1850 µ ¶ · ¸ 3 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
SOFTWARE OVERVIEW • QNX RTOS nodes: vision (SMP), binaural localisation, motor control. . . • Hard real time system essential for control tasks • Shared memory for intra-node communication • QNET Network transparency for inter-node communication • btlib, libmotors : BT848/878 and Galil QNX libraries developed in our Lab • Various other libraries: OpenCV, FFTW, dmcqnx, pxc200 µ ¶ · ¸ 4 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
DRIVER ARCHITECTURE Pure resource manager model Our hybrid resource manager µ ¶ · ¸ 5 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
DATA ACQUISITION SCHEME µ ¶ · ¸ 6 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
BINAURAL LOCALISATION Geometrical problem overview Ambiguity • Duplex theory: simple ITD and IID physics • Directional uncertainty: front-back & left-right • IDD = D left − D right = IT D × V sound • Path differences producing similar ITD values µ ¶ · ¸ 7 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
BINAURAL SYSTEM DESIGN Data acquisition: Spectral & correlation proc.: Post-processing: • A/D conversion • tone extraction • low-pass filtering • window function • ITD and IID calculation • half-wave rectification • DFT processing (fftw library) • IID enforced ITD calculation • SCOT Transform µ ¶ · ¸ 8 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
MATCHING EYE MOVEMENTS • So far implemented: voluntary movements: saccades, smooth pursuit, vergence. • All voluntary movements were based on very simple normalised cross correlation • Partially implemented: VOR, OKR • Pre-attentive cues: motion, color, skin-tone • Other saliency maps: habituation, sound source localisation (aids attention), no stereovision yet µ ¶ · ¸ 9 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
VOLUNTARY EYE MOVEMENTS Saccade Vergence Smooth pursuit µ ¶ · ¸ 10 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
PREATTENTIVE CUES Different saliency maps Motion and sound Habituation and sound • motion segmentation, • sound aids visual attention • activation: weighted sum • habituation, sound sources, • bar width: probability • target selection: centroid of the biggest region → saccade • (color, skin tone extraction) • bar value: signal strength µ ¶ · ¸ 11 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
FUTURE WORK • Develop cognitive vision system that learns from observation • Start working with log-polar representation, implement new vision algorithms • New analytical model for auditory cue templates (based on scattering theory) • Develop STM memory module utilising real-time in-memory database system • Make PALADYN work with YARP µ ¶ · ¸ 12 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
QUESTIONS Thank You. Binaural localisation: Lech B� la˙ zejewski lechblaz@ai.pjwstk.edu.pl Motor control: Sebastian Pawlak trix@ai.pjwstk.edu.pl Vestibular system: Krzysztof Luks kluks@ai.pjwstk.edu.pl Visual behaviours: Piotr Ka´ zmierczak piotr@ai.pjwstk.edu.pl µ ¶ · ¸ 13 the construction of humanoid robotic head: RobotCub Open Day – July 14, 2005
Recommend
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.