Overview Instruction level parallelism Dynamic Scheduling - PDF document
Overview Instruction level parallelism Dynamic Scheduling Techniques Scoreboarding Chapter 2 Tomasulos Algorithm Reducing Branch Cost with Dynamic Hardware Reducing Branch Cost with Dynamic Hardware Prediction
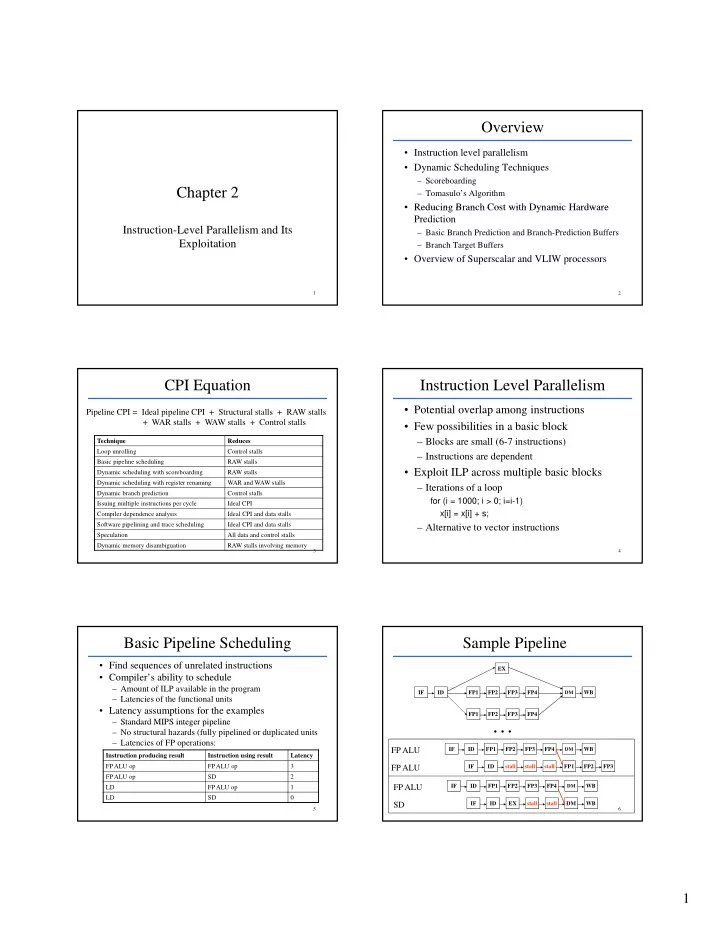
Overview • Instruction level parallelism • Dynamic Scheduling Techniques – Scoreboarding Chapter 2 – Tomasulo’s Algorithm • Reducing Branch Cost with Dynamic Hardware • Reducing Branch Cost with Dynamic Hardware Prediction Instruction-Level Parallelism and Its – Basic Branch Prediction and Branch-Prediction Buffers Exploitation – Branch Target Buffers • Overview of Superscalar and VLIW processors 1 2 CPI Equation Instruction Level Parallelism • Potential overlap among instructions Pipeline CPI = Ideal pipeline CPI + Structural stalls + RAW stalls + WAR stalls + WAW stalls + Control stalls • Few possibilities in a basic block Technique Reduces – Blocks are small (6-7 instructions) Loop unrolling Control stalls – Instructions are dependent Basic pipeline scheduling RAW stalls • Exploit ILP across multiple basic blocks Dynamic scheduling with scoreboarding RAW stalls Dynamic scheduling with register renaming WAR and WAW stalls – Iterations of a loop Dynamic branch prediction Control stalls for (i = 1000; i > 0; i=i-1) Issuing multiple instructions per cycle Ideal CPI x[i] = x[i] + s; Compiler dependence analysis Ideal CPI and data stalls Software pipelining and trace scheduling Ideal CPI and data stalls – Alternative to vector instructions Speculation All data and control stalls Dynamic memory disambiguation RAW stalls involving memory 3 4 Basic Pipeline Scheduling Sample Pipeline • Find sequences of unrelated instructions EX • Compiler’s ability to schedule – Amount of ILP available in the program IF ID FP1 FP2 FP3 FP4 DM WB – Latencies of the functional units • Latency assumptions for the examples FP1 FP2 FP3 FP4 – Standard MIPS integer pipeline Standard MIPS integer pipeline . . . – No structural hazards (fully pipelined or duplicated units – Latencies of FP operations: IF ID FP1 FP2 FP3 FP4 WB FP ALU DM Instruction producing result Instruction using result Latency FP ALU op FP ALU op 3 FP ALU IF ID stall stall stall FP1 FP2 FP3 FP ALU op SD 2 FP ALU IF ID FP1 FP2 FP3 FP4 DM WB LD FP ALU op 1 LD SD 0 SD IF ID EX stall stall DM WB 5 6 1
Basic Scheduling Loop Unrolling Unrolled loop (four copies): Sequential MIPS Assembly Code Scheduled Unrolled loop: for (i = 1000; i > 0; i=i-1) Loop: LD F0, 0(R1) Loop: LD F0, 0(R1) Loop: LD F0, 0(R1) ADDD F4, F0, F2 x[i] = x[i] + s; ADDD F4, F0, F2 LD F6, -8(R1) SD 0(R1), F4 SD 0(R1), F4 LD F10, -16(R1) SUBI R1, R1, #8 LD F6, -8(R1) LD F14, -24(R1) BNEZ R1, Loop ADDD F8, F6, F2 ADDD F4, F0, F2 SD -8(R1), F8 ADDD F8, F6, F2 Pipelined execution: p Scheduled pipelined execution: p p LD LD F10 F10, -16(R1) 16(R1) ADDD ADDD F12 F10 F2 F12, F10, F2 Loop: LD F0, 0(R1) 1 Loop: LD F0, 0(R1) 1 ADDD F12, F10, F2 ADDD F16, F14, F2 stall 2 SUBI R1, R1, #8 2 SD -16(R1), F12 SD 0(R1), F4 ADDD F4, F0, F2 3 ADDD F4, F0, F2 3 LD F14, -24(R1) SD -8(R1), F8 stall 4 stall 4 ADDD F16, F14, F2 SUBI R1, R1, #32 SD -24(R1), F16 stall 5 BNEZ R1, Loop 5 SD 16(R1), F12 SUBI R1, R1, #32 SD 0(R1), F4 6 SD 8 (R1), F4 6 BNEZ R1, Loop BNEZ R1, Loop SUBI R1, R1, #8 7 SD 8(R1), F16 stall 8 BNEZ R1, Loop 9 stall 10 7 8 Dynamic Scheduling Out-of-order execution (1/2) • Scheduling separates dependent instructions • Central idea of dynamic scheduling – Static – performed by the compiler – In-order execution: – Dynamic – performed by the hardware DIVD F0, F2, F4 IF ID DIV ….. • Advantages of dynamic scheduling ADDD F10, F0, F8 IF ID stall stall stall … SUBD F12 F8 F14 SUBD F12, F8, F14 IF stall stall ….. IF stall stall – Handles dependences unknown at compile time – Out-of-order execution: – Simplifies the compiler DIVD F0, F2, F4 IF ID DIV ….. – Optimization is done at run time SUBD F12, F8, F14 IF ID A1 A2 A3 A4 … • Disadvantages ADDD F10, F0, F8 IF ID stall ….. – Can not eliminate true data dependences 9 10 Dynamic Scheduling with a Out-of-Order Execution (2/2) Scoreboard • Separate issue process in ID: • Details in Appendix A.7 – Issue • Allows out-of-order execution • decode instruction – Sufficient resources • check structural hazards – No data dependencies • in-order execution • Responsible for issue, execution and hazards ibl f i i d h d – Read operands • Functional units with long delays • Wait until no data hazards • Read operands – Duplicated • Out-of-order execution/completion – Fully pipelined – Exception handling problems • CDC 6600 – 16 functional units – WAR hazards 11 12 2
MIPS with Scoreboard Scoreboard Operation • Scoreboard centralizes hazard management – Every instruction goes through the scoreboard – Scoreboard determines when the instruction can read its operands and begin execution – Monitors changes in hardware and decides when an stalled instruction can execute – Controls when instructions can write results • New pipeline ID EX WB Read Regs Execution Issue Write 13 14 Execution Process Scoreboard Data Structure • Issue • Instruction status – indicates pipeline stage – Functional unit is free (structural) • Functional unit status – Active instructions do not have same Rd (WAW) Busy – functional unit is busy or not • Read Operands – Checks availability of source operands Op – operation to perform in the unit (+, -, etc.) – Resolves RAW hazards dynamically (out-of-order R l RAW h d d i ll ( t f d Fi – destination register execution) Fj, Fk – source register numbers • Execution Qj, Qk – functional unit producing Fj, Fk – Functional unit begins execution when operands arrive – Notifies the scoreboard when it has completed execution Rj, Rk – flags indicating when Fj, Fk are ready • Write result • Register result status – FU that will write registers – Scoreboard checks WAR hazards – Stalls the completing instruction if necessary 15 16 Scoreboard Data Structure (1/3) Scoreboard Data Structure (2/3) Instruction Issue Read operands Execution completed Write LD F6, 34(R2) Y Y Y Y LD F2, 45(R3) Y Y Y MULTD F0, F2, F4 Y Y SUBD F8, F6, F2 DIVD F10, F0, F6 Y ADDD F6, F8, F2 Name Busy Op Fi Fj Fk Qj Qk Rj Rk Integer Y Load F2 R3 N Mult1 Y Mult F0 F2 F4 Integer N Y Mult2 N Add Y Sub F8 F6 F2 Integer Y N Divide Y Div F10 F0 F6 Mult1 N Y F0 F2 F4 F6 F8 F10 F12 . . . F30 Functional Unit Mult1 Int Add Div 17 18 3
Scoreboard Data Structure (3/3) Scoreboard Algorithm 19 20 Scoreboard Limitations Tomasulo Approach • Amount of available ILP • Another approach to eliminate stalls • Number of scoreboard entries – Combines scoreboard with – Limited to a basic block – Register renaming (to avoid WAR and WAW) – Extended beyond a branch • Designed for the IBM 360/91 g • Number and types of functional units – High FP performance for the whole 360 family – Structural hazards can increase with DS – Four double precision FP registers • Presence of anti- and output- dependences – Long memory access and long FP delays – Lead to WAR and WAW stalls • Can support overlapped execution of multiple iterations of a loop 21 22 Tomasulo Approach Stages • Issue – Empty reservation station or buffer – Send operands to the reservation station – Use name of reservation station for operands • Execute E t – Execute operation if operands are available – Monitor CDB for availability of operands • Write result – When result is available, write it to the CDB 23 24 4
Example (1/2) Example (2/2) 25 26 Loop Iterations Tomasulo’s Algorithm Loop: LD F0, 0(R1) MULTD F4,F0,F2 SD 0(R1), F4 SUBI R1, R1, #8 BNEZ R1, Loop An enhanced and detailed design in Fig. 2.12 of the textbook 27 28 Dynamic Hardware Prediction Basic Branch Prediction Buffers • Importance of control dependences a.k.a. Branch History Table (BHT) - Small direct-mapped cache of T/NT bits – Branches and jumps are frequent Branch Instruction – Limiting factor as ILP increases (Amdahl’s law) IR: • Schemes to attack control dependences + Branch Target – Static PC PC: • Basic (stall the pipeline) i ( ll h i li ) • Predict-not-taken and predict-taken BHT T (predict taken) • Delayed branch and canceling branch – Dynamic predictors • Effectiveness of dynamic prediction schemes NT (predict not- taken) – Accuracy PC + 4 – Cost 29 30 5
Recommend
















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.