Overview of Linear Prediction Introduction Terms and definitions - PowerPoint PPT Presentation
Overview of Linear Prediction Introduction Terms and definitions Important for more applications than just prediction Nonstationary case Prominent role in spectral estimation, Kalman filtering, fast algorithms, etc. Stationary
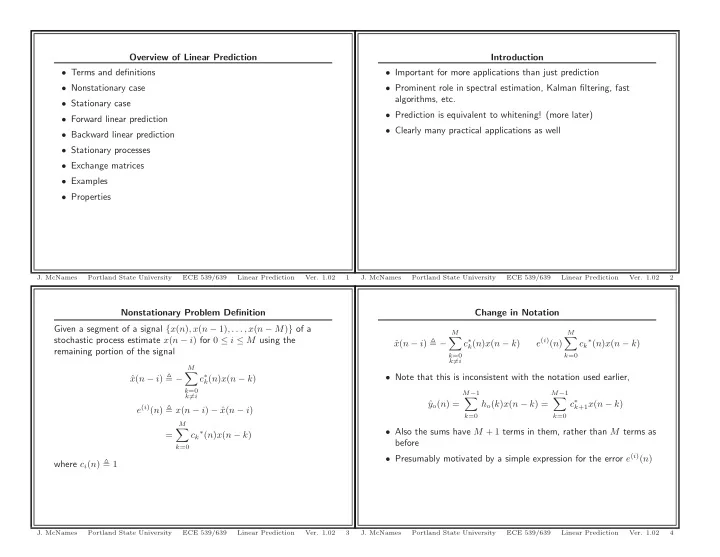
Overview of Linear Prediction Introduction • Terms and definitions • Important for more applications than just prediction • Nonstationary case • Prominent role in spectral estimation, Kalman filtering, fast algorithms, etc. • Stationary case • Prediction is equivalent to whitening! (more later) • Forward linear prediction • Clearly many practical applications as well • Backward linear prediction • Stationary processes • Exchange matrices • Examples • Properties J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 1 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 2 Nonstationary Problem Definition Change in Notation Given a segment of a signal { x ( n ) , x ( n − 1) , . . . , x ( n − M ) } of a M M � � stochastic process estimate x ( n − i ) for 0 ≤ i ≤ M using the x ( n − i ) � − c ∗ e ( i ) ( n ) ∗ ( n ) x ( n − k ) ˆ k ( n ) x ( n − k ) c k remaining portion of the signal k =0 k =0 k � = i � M x ( n − i ) � − c ∗ • Note that this is inconsistent with the notation used earlier, ˆ k ( n ) x ( n − k ) k =0 M − 1 M − 1 � � k � = i c ∗ y o ( n ) = ˆ h o ( k ) x ( n − k ) = k +1 x ( n − k ) e ( i ) ( n ) � x ( n − i ) − ˆ x ( n − i ) k =0 k =0 � M • Also the sums have M + 1 terms in them, rather than M terms as ∗ ( n ) x ( n − k ) = c k before k =0 • Presumably motivated by a simple expression for the error e ( i ) ( n ) where c i ( n ) � 1 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 3 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 4
Types of “Prediction” Linear “Prediction” Notation and Partitions � x ( n ) x ( n − M + 1) � T x ( n ) � � M � M x ( n − 1) . . . c ∗ e ( i ) ( n ) � ∗ ( n ) x ( n − k ) x ( n − i ) � − ˆ k ( n ) x ( n − k ) c k � � T x ( n ) � ¯ x ( n ) x ( n − 1) . . . x ( n − M ) k =0 k =0 k � = i � � T x T ( n − 1) = x ( n ) • Forward Linear Prediction : i = 0 � � T x T ( n ) = x ( n − M ) • Backward Linear Prediction : i = M – Misnomer, but terminology is rooted in the literature R ( n ) = E[ x ( n ) x H ( n )] ¯ x H ( n )] R ( n ) = E[¯ x ( n )¯ • Symmetric Linear Smoother : i = M/ 2 Forward and backward linear prediction use specific partitions of the “extended” autocorrelation matrix � � � R ( n ) � r H P x ( n ) f ( n ) r b ( n ) ¯ ¯ R ( n ) � R ( n ) � r H r f ( n ) R ( n − 1) b ( n ) P x ( n − M ) r f ( n ) = E[ x ( n − 1) x ∗ ( n )] r b ( n ) = E[ x ( n ) x ∗ ( n − M )] J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 5 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 6 Forward and Backward Linear Prediction Estimator and Error Forward and Backward Linear Prediction Solution Solution is the same as before, but watch the minus signs M � a ∗ = − a H ( n ) x ( n − 1) x f ( n ) = − ˆ k ( n ) x ( n − k ) R ( n − 1) a o ( n ) = − r f ( n ) k =1 R ( n ) b o ( n ) = − r b ( n ) M − 1 � b ∗ = − b H ( n ) x ( n ) P f , o ( n ) = P x ( n ) + r H x b ( n ) = − ˆ k ( n ) x ( n − k ) f ( n ) a o ( n ) k =0 P b , o ( n ) = P x ( n − M ) + r H b ( n ) b o ( n ) M � a ∗ = x ( n ) + a H ( n ) x ( n − 1) � M e f = x ( n ) + k ( n ) x ( n − k ) a ∗ x f ( n ) = − ˆ k ( n ) x ( n − k ) k =1 k =1 M − 1 � b ∗ = b H ( n ) x ( n ) + x ( n − M ) = − a H ( n ) x ( n − 1) e b = k ( n ) x ( n − k ) + x ( n − M ) k =0 M − 1 � b ∗ ˆ x b ( n ) = − k ( n ) x ( n − k ) • Again, new notation compared to the FIR linear estimation case k =0 • I use subscripts for the f instead of superscripts like the text = − b H ( n ) x ( n ) J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 7 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 8
Stationary Case: Autocorrelation Matrix Stationary Case: Cross-correlation Vector When the process is stationary, something surprising happens! � r x (0) r x (1) r x ( M ) � � r x (1) � . . . r ∗ x (1) r x (0) r x ( M − 1) r x (2) . . . r x (0) r x (1) r x ( M − 1) r x ( M ) � . . . � � � � � ¯ M × 1 � ( M +1) × ( M +1) = R r � � � � r ∗ x (1) r x (0) . . . r x ( M − 2) r x ( M − 1) � . . . � � . � ... � � . . . . � � � � . . . . � � ¯ ( M +1) × ( M +1) = R r ∗ r ∗ � . . . . � x ( M ) x ( M − 1) . . . r x (0) r x ( M ) ... . . . . � � . . . . � � r ∗ r ∗ x ( M − 1) x ( M − 2) . . . r x (0) r x (1) � � � � � � r ∗ x ( M ) r ∗ x ( M − 1) r ∗ x (1) r x (0) . . . r H r T r x (0) r x (0) ¯ f R = = � T r ∗ r f R R M × 1 � � r x (1) r x (2) r x ( M ) r . . . � R � � R � r b Jr ¯ R = = � � � R ( n ) � r H r H J r x (0) r x (0) r H P x ( n ) f ( n ) r b ( n ) b ¯ R ( n ) = = r H r f ( n ) R ( n − 1) b ( n ) P x ( n − M ) Clearly, r f = E[ x ( n − 1) x ∗ ( n )] = r ∗ r b = E[ x ( n ) x ∗ ( n − M )] = Jr R ( n ) = R ( n − 1) P x (0) = P x ( n − M ) = r x (0) where J is the exchange matrix J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 9 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 10 Exchange Matrix Forward/Backward Prediction Relationship ⎡ ⎤ Rb o = − r b = − Jr 0 0 . . . 1 ⎢ ⎥ . . . Ra o = − r f = − r ∗ ... . . . ⎢ ⎥ J H J = JJ H = I . . . J � ⎢ ⎥ JRa o = − Jr ∗ ⎣ ⎦ 0 1 . . . 0 JR ∗ a ∗ 1 0 . . . 0 o = − Jr = − r b JR ∗ = RJ • Counterpart to the identity matrix R ( Ja ∗ o ) = − r b • When multiplied on the left, flips a vector upside down b o = Ja ∗ o • When multiplied on the right, flips a vector sideways • The BLP parameter vector is the flipped and conjugated FLP • Don’t do this in MATLAB—many wasted multiplications by zeros parameter vector! • See fliplr and flipud • Useful for estimation: can solve for both and combine them to reduce variance • Further the prediction errors are the same! P f , o = P b , o = r (0) + r H a o = r (0) + r H Jb o J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 11 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 12
Example 1: MA Process Example 1: MMSE Versus Prediction Index i Create a synthetic MA process in MATLAB. Plot the pole-zero and transfer function of the system. Plot the MMSE versus the point 1 Minimum NMSE Estimated being estimated, MNMSE � M 0.8 c ∗ x ( n − i ) � − ˆ k ( n ) x ( n − k ) k =0 k � = i MNMSE 0.6 for M = 25 . 0.4 0.2 0 0 5 10 15 20 25 Prediction Index (i, Samples) J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 13 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 14 Example 1: Prediction Example Example 1: Prediction Example � � M:25 i:0 NMSE:0.388 M:25 i:13 NMSE:0.168 5 5 x ( n ) x ( n ) x ( n + 0) ˆ x ( n + 13) ˆ Signal + Estimate (scaled) Signal + Estimate (scaled) 0 0 −5 −5 0 10 20 30 40 50 60 70 80 90 100 0 10 20 30 40 50 60 70 80 90 100 Sample Time (n) Sample Time (n) J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 15 J. McNames Portland State University ECE 539/639 Linear Prediction Ver. 1.02 16
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.