Optimal Design Scenario Problem: Definition and Evaluation of - PowerPoint PPT Presentation
Optimal Design Scenario Problem: Definition and Evaluation of Projected Hessians Min f ( y, u ) s.t. c ( y, u ) = 0 for Piggyback Optimization where y R m and u R n are state and design variables Andreas Griewank, Nicolas Gauger, Jan
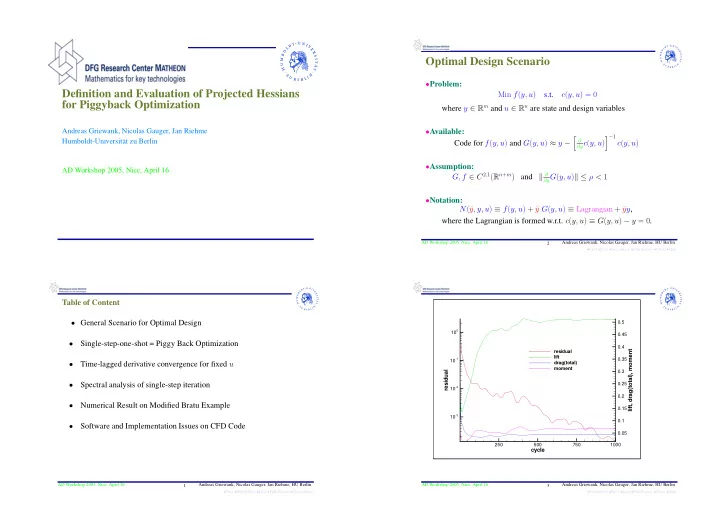
Optimal Design Scenario • Problem: Definition and Evaluation of Projected Hessians Min f ( y, u ) s.t. c ( y, u ) = 0 for Piggyback Optimization where y ∈ R m and u ∈ R n are state and design variables Andreas Griewank, Nicolas Gauger, Jan Riehme • Available: � − 1 � Humboldt-Universit¨ at zu Berlin ∂ Code for f ( y, u ) and G ( y, u ) ≈ y − ∂y c ( y, u ) c ( y, u ) • Assumption: AD Workshop 2005, Nice, April 16 G, f ∈ C 2 , 1 ( R n + m ) and � ∂ ∂y G ( y, u ) � ≤ ρ < 1 • Notation: N (¯ y, y, u ) ≡ f ( y, u ) + ¯ y G ( y, u ) ≡ Lagrangian + ¯ yy , where the Lagrangian is formed w.r.t. c ( y, u ) ≡ G ( y, u ) − y = 0 . AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin 2 • First • Prev • Next • Last • Full Screen • Close • Quit Table of Content • General Scenario for Optimal Design 0.5 0 10 0.45 • Single-step-one-shot = Piggy Back Optimization 0.4 residual lift, drag(total), moment lift 0.35 -1 10 drag(total) • Time-lagged derivative convergence for fixed u moment residual 0.3 • Spectral analysis of single-step iteration 0.25 -2 10 0.2 • Numerical Result on Modified Bratu Example 0.15 -3 10 0.1 • Software and Implementation Issues on CFD Code 0.05 250 500 750 1000 cycle AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin 1 3 • First • Prev • Next • Last • Full Screen • Close • Quit • First • Prev • Next • Last • Full Screen • Close • Quit
Single-step-one-shot = Piggy-Back Approach : Linear Convergence Result � G y ( y, u ) − G y (˜ y, u ) � ≤ ν � y − ˜ y � ≥ � f y ( y, u ) − f y (˜ y, u ) � y k +1 = G ( y k , u k ) − → primal feasibility at y ∗ = ⇒ � � lim k lim k � ∆ y k � ≤ ̺ ≥ � ∆¯ y k � for ∆ y k = y k − y ( u ) , ∆¯ y k = ¯ y k − ¯ y ( u ) ¯ y k +1 = N y ( y k , ¯ y k , u k ) − → dual feasibility at ¯ y ∗ u k +1 = u k − H − 1 k N u ( y k , ¯ y k , u k ) − → optimality at u ∗ Proof: Based on monotonic reduction of � ∆ y k � + ω � ∆¯ y k � where N u = ¯ y G u + f u ≈ reduced gradient for ω small enough. and H k is a suitable preconditioner AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin 4 6 • First • Prev • Next • Last • Full Screen • Close • Quit • First • Prev • Next • Last • Full Screen • Close • Quit Questions/Tasks for Piggy-Back: ONERA M6 Wing (mesh: 192x32x48 cells) 1 10 • Avoid data objects larger than dim( y ) · dim( u ) MACH 0.840 ALPHA 3.1294 -1 10 FLOWer, multigrid calculation (sym V-cycles on 3 mesh levels) -3 • Analyse convergence of y k and ¯ y k for fixed u 10 green: primal solution red: adjoint solution residual -5 10 • Determine preconditioner H k for fast local convergence -7 10 -9 10 • Evaluate/approximate H k by differentiation or updating -11 10 • Globalize by tradeoff between feasibility and optimality. -13 10 100 200 300 400 500 600 cycle AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin 5 7 • First • Prev • Next • Last • Full Screen • Close • Quit • First • Prev • Next • Last • Full Screen • Close • Quit
Question: Do � ∆ y k � and � ∆¯ y k � converge equally fast?? convergence history -2 "sec-adj_.state" Answer: NO – Adjoints lag behind because: "adjoint_state" -4 "direct._state" ( G, f ) ∈ C 2 , 1 , N (¯ y, y, u ) ≡ ¯ yG ( y, u ) + f ( y, u ) "original_state" -6 = ⇒ ln(step-norm) � j � -8 � � � � ∆ y k + j G y 0 ∆ y k + O ( � ∆ y k � 2 + � ∆¯ y k � 2 ) = ∆¯ y k + j N yy G T ∆¯ y k -10 y ⇒ provided G y = T Γ T − 1 , D = diag ( T T BT ) = -12 � j � � � Γ j G y 0 0 -14 ∼ jDT j − 1 Γ j N yy G T -16 y -18 0 500 1000 1500 2000 2500 3000 3500 4000 y k + j � ≈ j̺ j − 1 � ∆ y k � + ̺ j � ∆¯ = ⇒ � ∆¯ y k � = ⇒ � ∆ y k � / � ∆¯ y k �∼ 1 /k → 0 . iterations k AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin 8 10 • First • Prev • Next • Last • Full Screen • Close • Quit • First • Prev • Next • Last • Full Screen • Close • Quit Consequence error comparison 350 Adjoints ¯ y k and reduced gradient "sec-adj_original" "adjoint_original" 300 d f ( y ( u ) , u ) "direct_original" u k ≡ N u (¯ ¯ y k , y k , u k ) − → du k 250 lag behind primal feasibility like 1 k . For fixed ˙ u also step-ratio 200 y k +1 = ˙ ˙ G ( y k , ˙ y k , ˙ u ) ≡ G y ( y k , u k ) ˙ y k + G u ( x k , u ) ˙ u 150 and 100 y k +1 ≡ ˙ ¯ ˙ y k , ˙ u ) = ˙ ¯ G ( ˙ y k , ¯ y k , ˙ y k , u, ˙ ¯ y k G y ( y k , u ) ... ¯ 50 converge, but lag behind according to � ∆ ˙ y k �∼ k 2 � ∆ y k � 0 � ∆ ˙ y k �∼ k � ∆ y k � and ¯ 0 500 1000 1500 2000 2500 3000 3500 4000 iterations k AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin AD Workshop 2005, Nice, April 16 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin 9 11 • First • Prev • Next • Last • Full Screen • Close • Quit • First • Prev • Next • Last • Full Screen • Close • Quit
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.