On the Node Flow Cone of an Acyclic Directed Network Maurice - PowerPoint PPT Presentation
On the Node Flow Cone of an Acyclic Directed Network Maurice Queyranne Faculty of Commerce, University of British Columbia Vancouver, B.C., Canada 7 th Aussois Conference on Combinatorial Optimization March 10-14, 2003 7 th Aussois Conference
On the Node Flow Cone of an Acyclic Directed Network Maurice Queyranne Faculty of Commerce, University of British Columbia Vancouver, B.C., Canada 7 th Aussois Conference on Combinatorial Optimization March 10-14, 2003 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 1
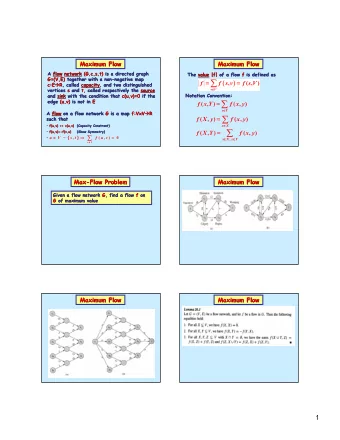
The Problem Given: • an acyclic digraph G = ( V , A ) (no directed cycles) • nonempty node subsets S ⊆ V of sources T ⊆ V of sinks let P be the set of all directed paths P = ( v 1 , v 2 , …, v k ) in G with v 1 ∈ S and v k ∈ T , called the S-T- paths in G A vector y ∈ R P + is a path flow vector , where y P > 0 is the flow on path P ∈ P To every path flow vector y ∈ R P + associate its node flow vector ϕ ( y ) ∈ R V + defined by ϕ ( y ) u = Σ { y P : all P ∈ P with u ∈ P } for all u ∈ V . thus ν ( y ) u is the total flow through node u The node flow cone X of ( G , S , T ) is X = { x ∈ R V + : x = ϕ ( y ) for some y ∈ R P + } . 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 2
Motivation: production planning models for make-to-order systems inspired by: Michael O. Ball, Chien-Yu Chen & Zhen-Ying Zhao, “Material Compatibility Constraints for Make-to-Order Production Planning,” University of Maryland, 2001. Nodes v ∈ V correspond to components S to the set of all possible first components (e.g., in assembly order) T to the set of all possible last components Assume that component compatibility constraints may be represented by the acyclic digraph G = ( V , A ) in such a way that component sequence ( v 1 , v 2 , …, v k ) defines a (feasible) component configuration if and only if ( v 1 , v 2 , …, v k ) is a directed path in G . (That is, component compatibility constraints only arise between “consecutive pairs” of components v j v j +1 ∈ A ) A vector y ∈ R P + represents a production plan for the configurations Its node flow vector x = ϕ ( y ) represents the amounts of each component required for that production plan. As P may be very large and the y variables appear only in connection with the x variables, we want to “project away” the y variables and use instead a system of linear inequalities defining the corresponding set X of all node flow vectors. 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 3
Remark: Let g ( P ) ∈ R V denote the node-path incidence vector of path P ∈ P , that is, g ( P ) u = 1 if u ∈ P 0 otherwise then X is the cone generated by the vectors g ( P ) for all P ∈ P Thus, knowing this “internal description” (or “extreme ray description”) of the cone X , we seek its “external description” (or “linear inequality description”) Notation: For U ⊆ V let x ( U ) = Σ v ∈ U x u A + ( U ) = { v ∈ V : uv ∈ A for some u ∈ U } the set of (immediate) successors of U A − ( U ) = { v ∈ V : vu ∈ A for some u ∈ U } the set of (immediate) predecessors of U 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 4
Known Results 1) Bipartite graphs Let G = ( V 1 + V 2 , A ) where A ⊆ V 1 × V 2 be a bipartite graph; S = V 1 and T = V 2 Theorem 1 (Ball & al.): When G = ( V 1 + V 2 , A ) is bipartite with S = V 1 and T = V 2 its node flow cone is X = { x ∈ R V + : x ( V 1 ) = x ( V 2 ) x ( U ) < x ( A + ( U )) for all U ⊆ V 1 } = { x ∈ R V + : x ( V 1 ) = x ( V 2 ) x ( W ) < x ( A − ( W )) for all W ⊆ V 2 }. Remark : Let X 1 denote the first cone above, and X 2 the second cone. If x ∈ X 2 then for all U ⊆ V 1 define W = V 2 \ A + ( U ), so A − ( W ) ⊆ V 1 \ U and 0 > x ( W ) − x ( A − ( W )) > x ( V 2 \ A + ( U )) − x ( V 1 \ U ) = x ( V 2 ) − x (A + ( U )) − x ( V 1 ) + x ( U ) = x ( U ) − x (A + ( U )) so x ∈ X 1 . This shows that X 2 ⊆ X 1 . Similarly one shows that X 1 ⊆ X 2 and therefore X 1 = X 2 . 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 5
Theorem 1 (Ball & al.): When G = ( V 1 + V 2 , A ) is bipartite with S = V 1 and T = V 2 its node flow cone is X = { x ∈ R V + : x ( V 1 ) = x ( V 2 ) x ( U ) < x ( A + ( U )) for all U ⊆ V 1 }. Proof (Ball & al.): Given rational x ′∈ Q V + rescale x ′ as x ′ = λ x such that x is integral and x ′∈ X iff x ∈ X . x u copies u 1 , u 2 , …, u k ∈ V i ″ of each node u ∈ V i for i = 1,2 Make and x u x v copies u i v j ∈ A ″ of each arc uv ∈ A. Let V ″ = V 1 ″ + V 2 ″ and invoke the Balas & Pulleyblank (1983) characterization of the perfectly matchable induced subgraphs of the resulting bipartite graph G ″ = ( V 1 ″ + V 2 ″ , A ″ ) : conv { z ∈ {0,1} V ″ : z is the characteristic vector of a subset Z ⊆ V ″ such that ( Z , A ( Z )) contains a perfect matching } = { z ∈ R V : 0 < z < 1, z ( V 1 ″ ) = z ( V 2 ″ ) z ( U ) < z ( A + ( U )) for all U ⊆ V 1 ″ } QED 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 6
Theorem 1 (Ball & al.): When G = ( V 1 + V 2 , A ) is bipartite with S = V 1 and T = V 2 X = { x ∈ R V its node flow cone is + : x ( V 1 ) = x ( V 2 ) x ( U ) < x ( A + ( U )) for all U ⊆ V 1 }. Direct Proof : To every x ∈ R V + associate the capacitated network N ( x ) = ( V ′ , A ′ , c x ) where V ′ = V + s + t , s is a new source, t is a new sink, A ′ consists of : the source arcs su for all u ∈ V 1 with capacity c x = x u su the sink arcs vt for all v ∈ V 2 with capacity c x = x v vt and all arcs uv ∈ A with capacity c x = + ∞ uv Let z ( x ) = x ( V 1 ). By the Max-flow Min-cut Theorem there exists a feasible flow with value z ( x ) in N ( x ) if and only if x ( V 2 ) = z ( x ) and the capacity of every (other) s-t- cut in N ( x ) is at least z ( x ). It suffices to consider all s-t- cuts ( U+s , W+t ) with finite capacity , that is, letting U i = U i ∩ V i and W i = W i ∩ V i for i =1,2, such that U 2 ⊆ A + ( U 1 ) . Furthermore, since c x > 0, the capacity of such finite capacity cuts ( U+s , W+t ) satisfy c x ( U+s , W+t ) > c x ( U+s , ( V 2 \ A + ( U 1 ) ) +t ) = x ( V 1 ) − x ( U 1 ) + x ( A + ( U 1 )) Thus x ∈ X if and only if x ( V 1 ) = x ( V 2 ) and x ( V 1 ) − x ( U 1 ) + x ( A + ( U 1 )) > x ( V 1 ) for all U 1 ⊆ V 1 QED 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 7
2) Multipartite graphs Let G = ( V , A ) be a multipartite graph , where V = V 1 + V 2 + … + V L consists of L layers , with S = V 1 and T = V L and A ⊆ ( V 1 × V 2 ) ∪ ( V 2 × V 3 ) ∪ … ∪ ( V L -1 × V L ) so arcs only connect successive layers Theorem 2 (Ball & al.): When G is multipartite as described, then its node flow cone is X = { x ∈ R V for all i = 1, 2, …, L − 1 + : x ( V i ) = x ( V i +1 ) x ( U ) < x ( A + ( U )) for all U ⊆ V i and all i = 1, 2, …, L − 1} = { x ∈ R V for all i = 1, 2, …, L − 1 + : x ( V i ) = x ( V i +1 ) x ( W ) < x ( A − ( W )) for all W ⊆ V i and all i = 2, 3, …, L } Proof : Let G i = ( V i + V i +1 , A ∩ ( V i × V i +1 ) ) be the subgraph induced by layers V i and V i +1 X i denote the node flow cone of the bipartite graph G i (with S = V i and T = V i +1 ) X ′ i = { x ∈ R V : ( x V i , x V i +1 ) ∈ X i } the cylinder of R V with base X i Then X = X ′ 1 ∩ X ′ 2 ∩ ... ∩ X ′ L -1 since the restriction of x to each V i + V i +1 must be in X i . Conversely, if x ∈ X ′ 1 ∩ X ′ 2 ∩ ... ∩ X ′ L -1 then there exist arc flows y i in each G i such that ϕ ( y i ) = ( x V i , x V i +1 ). We may paste these arc flows into path flows, and therefore x ∈ X . QED 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 8
General Acyclic Digraph: Let G = ( V , A ) be an acyclic digraph, with source set ∅ ≠ S ⊆ V and sink set ∅ ≠ T ⊆ V • Are the constraints x ( U ) < x ( A + ( U )) for all U ⊆ V x ( W ) < x ( A − ( W )) for all W ⊆ V valid for the node flow cone? and 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 9
General Acyclic Digraph: Let G = ( V , A ) be an acyclic digraph, with source set ∅ ≠ S ⊆ V and sink set ∅ ≠ T ⊆ V • Are the constraints x ( U ) < x ( A + ( U )) for all U ⊆ V x ( W ) < x ( A − ( W )) for all W ⊆ V valid for the node flow cone? and No , because x ( U ) “double-count” the flow on the paths that visit U more than once. Node set U ⊆ V is path-independent if no path P ∈ P visits U more than once. If U is path-independent, and y ∈ R P + is a path flow vector with x = ϕ ( y ), then x ( U ) = Σ { y P : all P ∈ P with P ∩ U ≠ ∅ }, the total flow through node set U . Further if U ∩ T = ∅ then these x ( U ) units of flow must traverse the successors A + ( U ) therefore: x ( U ) < x ( A + ( U )) for all U ⊆ V that are path independent and satisfy U ∩ T = ∅ (1) are valid inequalities for the node flow cone X . 7 th Aussois Conference on Combinatorial Optimization M. Queyranne 10
Recommend




![c*,nr+-T)1,.^ ,a,],;.) \ Nsr'pLh,. c-^-a- 5(n) = Aj \anet.({) lo yI}ii,;:", J atwa(r) = 4](https://c.sambuz.com/727938/c-nr-t-1-a-s.webp)
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.