Nonlinear tools in the fractional setting (and vice-versa) Giuseppe - PowerPoint PPT Presentation
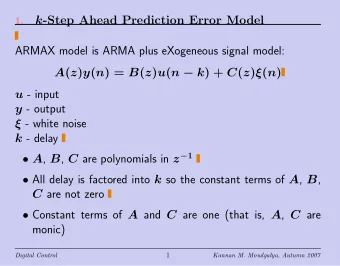
Nonlinear tools in the fractional setting (and vice-versa) Giuseppe Mingione ICTP May 31, 2017 Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa) Part 1: Local and nonlocal theories Part 1: Local Nonlinear
Nonlinear tools in the fractional setting (and vice-versa) Giuseppe Mingione ICTP – May 31, 2017 Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Part 1: Local and nonlocal theories Part 1: Local Nonlinear Potential Theory and other nonlinear tools Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Local versions In bounded domains one uses � R | µ | ( B ̺ ( x )) d ̺ I µ β ( x , R ) := β ∈ (0 , n ] ̺ n − β ̺ 0 since � d | µ | ( y ) I µ β ( x , R ) � | x − y | n − β B R ( x ) = I β ( | µ | � B R ( x ))( x ) ≤ I β ( | µ | )( x ) for non-negative measures Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Nonlinear potentials The nonlinear Wolff potential is defined by � R 1 p − 1 d ̺ � | µ | ( B ̺ ( x )) � W µ β, p ( x , R ) := β ∈ (0 , n / p ] ̺ n − β p ̺ 0 which for p = 2 reduces to the usual Riesz potential � R µ ( B ̺ ( x )) d ̺ I µ β ( x , R ) := β ∈ (0 , n ] ̺ n − β ̺ 0 The nonlinear Wolff potential plays in nonlinear potential theory the same role the Riesz potential plays in the linear one Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The first nonlinear potential estimate Theorem (Kilpel¨ ainen & Mal´ y, Acta Math. 1994) If u solves − div ( | Du | p − 2 Du ) = µ then � 1 / ( p − 1) � � | u | p − 1 dy | u ( x ) | � W µ 1 , p ( x , R ) + − B R ( x ) holds Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The first nonlinear potential estimate Theorem (Kilpel¨ ainen & Mal´ y, Acta Math. 1994) If u solves − div ( | Du | p − 2 Du ) = µ then � 1 / ( p − 1) � � | u | p − 1 dy | u ( x ) | � W µ 1 , p ( x , R ) + − B R ( x ) holds where � R � 1 / ( p − 1) d ̺ � | µ | ( B ̺ ( x )) W µ 1 , p ( x , R ) := ̺ n − p ̺ 0 Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The first nonlinear potential estimate Theorem (Kilpel¨ ainen & Mal´ y, Acta Math. 1994) If u solves − div ( | Du | p − 2 Du ) = µ then � 1 / ( p − 1) � � | u | p − 1 dy | u ( x ) | � W µ 1 , p ( x , R ) + − B R ( x ) holds where � R � 1 / ( p − 1) d ̺ � | µ | ( B ̺ ( x )) W µ 1 , p ( x , R ) := ̺ n − p ̺ 0 For p = 2 we are back to the Riesz potential W µ 1 , p = I µ 2 - the above estimate is non-trivial already in this situation Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Controlling the Wolff potential � ∞ � 1 / ( p − 1) d ̺ � | µ | ( B ̺ ( x )) � [ I β ( | µ | )] 1 / ( p − 1) � ̺ � I β ( x ) ̺ n − β p 0 The quantity in the right-hand side is usually called Havin-Mazya potential Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
A first gradient potential estimate Theorem (Min., JEMS 2011) When p = 2 , if u solves − div a ( Du ) = µ then � | Du ( x ) | � I | µ | 1 ( x , R ) + − | Du | dy B R ( x ) holds Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
A first gradient potential estimate Theorem (Min., JEMS 2011) When p = 2 , if u solves − div a ( Du ) = µ then � | Du ( x ) | � I | µ | 1 ( x , R ) + − | Du | dy B R ( x ) holds For solutions in W 1 , 1 ( R N ) we have � d | µ | ( y ) | Du ( x ) | � | x − y | n − 1 = I 1 ( | µ | )( x ) R n Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The p � = 2 case: a long path towards optimality Theorem (Duzaar & Min., AJM 2011) When p ≥ 2 , if u solves − div a ( Du ) = µ then � | Du ( x ) | � W µ 1 / p , p ( x , R ) + − | Du | dy B R ( x ) holds Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The p � = 2 case: a long path towards optimality Theorem (Duzaar & Min., AJM 2011) When p ≥ 2 , if u solves − div a ( Du ) = µ then � | Du ( x ) | � W µ 1 / p , p ( x , R ) + − | Du | dy B R ( x ) holds where � R � 1 / ( p − 1) d ̺ � | µ | ( B ̺ ( x )) W µ 1 / p , p ( x , R ) = ̺ n − 1 ̺ 0 Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Indeed Theorem (Kuusi & Min., CRAS 2011 + ARMA 2013) If u solves − div ( | Du | p − 2 Du ) = µ then � p − 1 � � | Du ( x ) | p − 1 � I | µ | 1 ( x , R ) + − | Du | dy B R ( x ) holds Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Indeed Theorem (Kuusi & Min., CRAS 2011 + ARMA 2013) If u solves − div ( | Du | p − 2 Du ) = µ then � p − 1 � � | Du ( x ) | p − 1 � I | µ | 1 ( x , R ) + − | Du | dy B R ( x ) holds The theorem still holds for general equations of the type − div a ( Du ) = µ The phenomenon is general: Baroni (Calc. Var. 2015) has given a far-reaching extension of this result to a family of very general operator with non-necessarily polynomial behaviour Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
A global estimate Theorem (Kuusi & Min., CRAS 2011 + ARMA 2013) If u solves − div ( | Du | p − 2 Du ) = µ and decays naturally, then � d | µ | ( y ) | Du ( x ) | p − 1 � | x − y | n − 1 = I 1 ( | µ | )( x ) R n Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Nonlocal problems Part 2: Nonlocal Nonlinear Potential Theory Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The classical fractional Laplacean ( −△ ) α u = f for 0 < s < 1 means that � ( −△ ) α u , ϕ � := � � [ u ( x ) − u ( y )][ ϕ ( x ) − ϕ ( y )] � dx dy = R n f ϕ dx | x − y | n +2 α R n R n for every ϕ ∈ C ∞ 0 ( R n ) Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Nonlocal operators with measurable coefficients � � � R n [ u ( x ) − u ( y )][ ϕ ( x ) − ϕ ( y )] K ( x , y ) dx dy = R n f ϕ dx R n where 1 Λ ∀ x , y ∈ R n , x � = y Λ | x − y | n +2 α ≤ K ( x , y ) ≤ | x − y | n +2 α These correspond to linear elliptic equations of the type − div ( A ( x ) Du ) = f where A ( x ) is an elliptic matrix with measurable coefficients Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Nonlinear nonlocal equations � � � R n Φ( u ( x ) − u ( y ))[ ϕ ( x ) − ϕ ( y )] K ( x , y ) dx dy = R n f ϕ dx R n where Φ( t ) t ≥ t 2 , | Φ( t ) | ≤ Λ | t | , ∀ t ∈ R These correspond to linear elliptic equations of the type − div a ( x , Du ) = f where z �→ a ( x , z ) is strictly monotone with quadratic growth Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The nonlocal p -Laplacean operator � � � R n Φ( u ( x ) − u ( y ))[ ϕ ( x ) − ϕ ( y )] K ( x , y ) dx dy = R n f ϕ dx R n where this time 1 Λ Λ | x − y | n + p α ≤ K ( x , y ) ≤ | x − y | n + p α and Λ − 1 | t | p ≤ Φ( t ) t ≤ Λ | t | p Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Nonlocal problems We consider the fractional p -Laplacean �−L p u , ϕ � � � R n | u ( x ) − u ( y ) | p − 2 [ u ( x ) − u ( y )][ ϕ ( x ) − ϕ ( y )] K ( x , y ) dx dy = R n � = R n f ϕ dx with 1 Λ Λ | x − y | n + p α ≤ K ( x , y ) ≤ | x − y | n + p α and p ≥ 2 for simplicity Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
This arises when minimizing fractional energies of the type � � R n | u ( x ) − u ( y ) | p K ( x , y ) dx dy v �→ R n Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Nonlocal problems We consider the nonlocal Dirichlet problem � −L p u = 0 in Ω u = g on R n \ Ω where g ∈ W α, p ( R n ) Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The Tail � 1 / ( p − 1) � | v ( x ) | p − 1 � r p α Tail( v ; x 0 , r ) := | x − x 0 | n + p α dx R n \ B r ( x 0 ) Observe that W α, p ( R n )-functions have finite tail. We can consider the tail space v ∈ L p − 1 L p − 1 p α ( R n ) := loc ( R n ) : � Tail( v ; z , r ) < ∞ ∀ z ∈ R n , ∀ r ∈ (0 , ∞ ) � and assume that g ∈ W α, p loc ( R n ) ∩ L p − 1 p α ( R n ) Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
The sup-bound for the nonlocal p -Laplacean Theorem (Di Castro & Kuusi & Palatucci, Ann. IHP 2014) Let v ∈ W α, p ( R n ) be a weak solution. Let B r ( x 0 ) ⊂ Ω ; then the following estimate holds: � 1 / p � � | v | p dx sup | v | ≤ c − + c Tail( v ; x 0 , r / 2) B r / 2 ( x 0 ) B r ( x 0 ) Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
General regularity theory Moreover, Di Castro & Kuusi & Palatucci also developed a remarkable regularity theory including local H¨ older continuity of such solutions and Harnack inequality (JFA 2014). Giuseppe Mingione Nonlinear tools in the fractional setting (and vice-versa)
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.