Nonlinear Control Lecture # 3 Two-Dimensional Systems Nonlinear - PowerPoint PPT Presentation
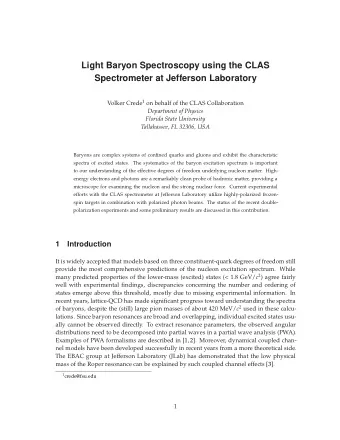
Nonlinear Control Lecture # 3 Two-Dimensional Systems Nonlinear Control Lecture # 3 Two-Dimensional Systems 1 Multiple Equilibria Example 2.2: Tunnel-diode circuit L i L i,mA X X s v + L 1
Nonlinear Control Lecture # 3 Two-Dimensional Systems Nonlinear Control Lecture # 3 Two-Dimensional Systems
1 Multiple Equilibria Example 2.2: Tunnel-diode circuit L i � � � � � � L i,mA X X s � � v + L � 1 i i C C � � C C � � C R P P � i=h(v) � � P P P � � � R P P P 0.5 � � � P P + + J � v v R C J � C J � 0 � � E −0.5 0 0.5 1 v,V (a) (b) x 1 = v C , x 2 = i L Nonlinear Control Lecture # 3 Two-Dimensional Systems
x 1 ˙ = 0 . 5[ − h ( x 1 ) + x 2 ] x 2 ˙ = 0 . 2( − x 1 − 1 . 5 x 2 + 1 . 2) h ( x 1 ) = 17 . 76 x 1 − 103 . 79 x 2 1 + 229 . 62 x 3 1 − 226 . 31 x 4 1 + 83 . 72 x 5 1 i R 1.2 1 0.8 Q 1 = (0 . 063 , 0 . 758) Q 2 Q1 0.6 Q 2 = (0 . 285 , 0 . 61) 0.4 Q 3 = (0 . 884 , 0 . 21) Q 3 0.2 0 0 0.5 1 vR Nonlinear Control Lecture # 3 Two-Dimensional Systems
� − 0 . 5 h ′ ( x 1 ) � ∂f 0 . 5 ∂x = − 0 . 2 − 0 . 3 � � − 3 . 598 0 . 5 A 1 = Eigenvalues : − 3 . 57 , − 0 . 33 , − 0 . 2 − 0 . 3 � � 1 . 82 0 . 5 A 2 = , Eigenvalues : 1 . 77 , − 0 . 25 − 0 . 2 − 0 . 3 � − 1 . 427 � 0 . 5 A 3 = , Eigenvalues : − 1 . 33 , − 0 . 4 − 0 . 2 − 0 . 3 Q 1 is a stable node; Q 2 is a saddle; Q 3 is a stable node Nonlinear Control Lecture # 3 Two-Dimensional Systems
x 2 1.6 1.4 1.2 1 0.8 Q1 Q 2 0.6 0.4 0.2 Q3 0 x1 −0.2 −0.4 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Nonlinear Control Lecture # 3 Two-Dimensional Systems
Example 2.3: Pendulum x 1 = x 2 , ˙ x 2 = − sin x 1 − 0 . 3 x 2 ˙ Equilibrium points at ( nπ, 0) for n = 0 , ± 1 , ± 2 , . . . � � � � x 2 ∂f 0 1 f ( x ) = ∂x = , − sin x 1 − 0 . 3 x 2 − cos x 1 − 0 . 3 Nonlinear Control Lecture # 3 Two-Dimensional Systems
∂f � � 0 1 ∂x = − cos x 1 − 0 . 3 Linearization at (0 , 0) and ( π, 0) : � � 0 1 A 1 = ; Eigenvalues : − 0 . 15 ± j 0 . 9887 − 1 − 0 . 3 � 0 � 1 A 2 = ; Eigenvalues : − 1 . 1612 , 0 . 8612 1 − 0 . 3 (0 , 0) is a stable focus and ( π, 0) is a saddle Nonlinear Control Lecture # 3 Two-Dimensional Systems
4 x 2 3 B 2 A 1 0 x 1 −1 −2 −3 −4 −8 −6 −4 −2 0 2 4 6 8 Nonlinear Control Lecture # 3 Two-Dimensional Systems
Oscillation A system oscillates when it has a nontrivial periodic solution x ( t + T ) = x ( t ) , ∀ t ≥ 0 Linear (Harmonic) Oscillator: � 0 � − β z = ˙ z β 0 z 1 ( t ) = r 0 cos( βt + θ 0 ) , z 2 ( t ) = r 0 sin( βt + θ 0 ) � z 2 (0) � � θ 0 = tan − 1 r 0 = z 2 1 (0) + z 2 2 (0) , z 1 (0) Nonlinear Control Lecture # 3 Two-Dimensional Systems
The linear oscillation is not practical because It is not structurally stable. Infinitesimally small perturbations may change the type of the equilibrium point to a stable focus (decaying oscillation) or unstable focus (growing oscillation) The amplitude of oscillation depends on the initial conditions (The same problems exist with oscillation of nonlinear systems due to a center equilibrium point, e.g., pendulum without friction) Nonlinear Control Lecture # 3 Two-Dimensional Systems
Limit Cycles Example: Negative Resistance Oscillator i ❳ ❳ ✘ ✘ + ✟ i = h(v) ✟ ✠ C L ✟ ✠ Resistive ✠ ✟ v ✠ Element ❈ ❈✄ i C ❈ ❈✄ i L ✄ ✄ v − (a) (b) Nonlinear Control Lecture # 3 Two-Dimensional Systems
x 1 ˙ = x 2 ˙ = − x 1 − εh ′ ( x 1 ) x 2 x 2 There is a unique equilibrium point at the origin 0 1 � A = ∂f � = � ∂x � − 1 − εh ′ (0) x =0 λ 2 + εh ′ (0) λ + 1 = 0 h ′ (0) < 0 ⇒ Unstable Focus or Unstable Node Nonlinear Control Lecture # 3 Two-Dimensional Systems
Energy Analysis: E = 1 2 Cv 2 C + 1 2 Li 2 L i L = − h ( x 1 ) − 1 v C = x 1 and εx 2 2 C { x 2 1 + [ εh ( x 1 ) + x 2 ] 2 } E = 1 ˙ x 1 + [ εh ( x 1 ) + x 2 ][ εh ′ ( x 1 ) ˙ E = C { x 1 ˙ x 1 + ˙ x 2 ] } = C { x 1 x 2 + [ εh ( x 1 ) + x 2 ][ εh ′ ( x 1 ) x 2 − x 1 − εh ′ ( x 1 ) x 2 ] } = C [ x 1 x 2 − εx 1 h ( x 1 ) − x 1 x 2 ] = − εCx 1 h ( x 1 ) Nonlinear Control Lecture # 3 Two-Dimensional Systems
−a x1 b ˙ E = − εCx 1 h ( x 1 ) Nonlinear Control Lecture # 3 Two-Dimensional Systems
Example 2.4: Van der Pol Oscillator x 1 ˙ = x 2 − x 1 + ε (1 − x 2 ˙ = 1 ) x 2 x 2 4 x2 x2 3 3 2 2 1 1 0 0 x1 x1 −1 −1 −2 −2 −3 −2 0 2 4 −2 0 2 4 (a) (b) ε = 0 . 2 ε = 1 Nonlinear Control Lecture # 3 Two-Dimensional Systems
1 z 1 ˙ = εz 2 − ε ( z 1 − z 2 + 1 3 z 3 ˙ = 2 ) z 2 3 z2 x2 10 2 1 5 0 z1 0 −1 x1 −2 −5 −3 −5 0 5 10 −2 0 2 (a) (b) ε = 5 Nonlinear Control Lecture # 3 Two-Dimensional Systems
x2 x2 x1 x1 (b) (a) Stable Limit Cycle Unstable Limit Cycle Nonlinear Control Lecture # 3 Two-Dimensional Systems
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.