Nonlinear Control Lecture # 2 Two-Dimensional Systems Nonlinear Control Lecture # 2 Two-Dimensional Systems
x 1 ˙ = f 1 ( x 1 , x 2 ) = f 1 ( x ) x 2 ˙ = f 2 ( x 1 , x 2 ) = f 2 ( x ) Let x ( t ) = ( x 1 ( t ) , x 2 ( t )) be a solution that starts at initial state x 0 = ( x 10 , x 20 ) . The locus in the x 1 – x 2 plane of the solution x ( t ) for all t ≥ 0 is a curve that passes through the point x 0 . This curve is called a trajectory or orbit The x 1 – x 2 plane is called the state plane or phase plane The family of all trajectories is called the phase portrait The vector field f ( x ) = ( f 1 ( x ) , f 2 ( x )) is tangent to the trajectory at point x because dx 2 = f 2 ( x ) dx 1 f 1 ( x ) Nonlinear Control Lecture # 2 Two-Dimensional Systems
Vector Field diagram Represent f ( x ) as a vector based at x ; that is, assign to x the directed line segment from x to x + f ( x ) x 2 x + f ( x ) = (3 , 2) q ✟ ✟✟✟✟✟ f ( x ) ✯ q x = (1 , 1) x 1 Repeat at every point in a grid covering the plane Nonlinear Control Lecture # 2 Two-Dimensional Systems
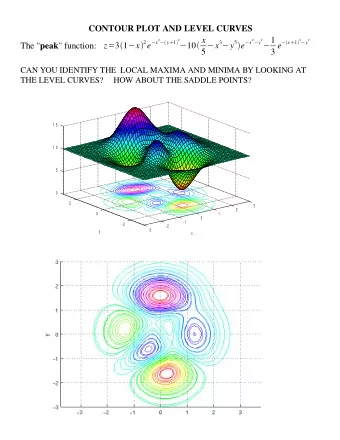
2 1 x 2 0 −1 −2 −2 −1 0 1 2 x 1 x 1 = x 2 , ˙ x 2 = − sin x 1 ˙ Nonlinear Control Lecture # 2 Two-Dimensional Systems
Numerical Construction of the Phase Portrait Select a bounding box in the state plane Select an initial point x 0 and calculate the trajectory through it by solving x = f ( x ) , ˙ x (0) = x 0 in forward time (with positive t ) and in reverse time (with negative t ) x = − f ( x ) , ˙ x (0) = x 0 Repeat the process interactively Use Simulink or pplane Nonlinear Control Lecture # 2 Two-Dimensional Systems
Qualitative Behavior of Linear Systems x = Ax, ˙ A is a 2 × 2 real matrix x ( t ) = M exp( J r t ) M − 1 x 0 When A has distinct eigenvalues, � λ 1 � α � � 0 − β J r = or 0 λ 2 β α x ( t ) = Mz ( t ) z = J r z ( t ) ˙ Nonlinear Control Lecture # 2 Two-Dimensional Systems
Case 1. Both eigenvalues are real: M = [ v 1 , v 2 ] v 1 & v 2 are the real eigenvectors associated with λ 1 & λ 2 z 1 = λ 1 z 1 , ˙ z 2 = λ 2 z 2 ˙ z 1 ( t ) = z 10 e λ 1 t , z 2 ( t ) = z 20 e λ 2 t z 2 = cz λ 2 /λ 1 c = z 20 / ( z 10 ) λ 2 /λ 1 , 1 The shape of the phase portrait depends on the signs of λ 1 and λ 2 Nonlinear Control Lecture # 2 Two-Dimensional Systems
λ 2 < λ 1 < 0 e λ 1 t and e λ 2 t tend to zero as t → ∞ e λ 2 t tends to zero faster than e λ 1 t Call λ 2 the fast eigenvalue ( v 2 the fast eigenvector) and λ 1 the slow eigenvalue ( v 1 the slow eigenvector) The trajectory tends to the origin along the curve z 2 = cz λ 2 /λ 1 1 with λ 2 /λ 1 > 1 dz 2 = cλ 2 z [( λ 2 /λ 1 ) − 1] 1 dz 1 λ 1 Nonlinear Control Lecture # 2 Two-Dimensional Systems
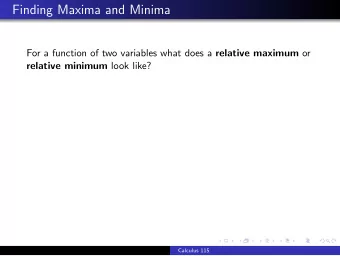
z2 z1 Stable Node λ 2 > λ 1 > 0 Reverse arrowheads ⇒ Unstable Node Nonlinear Control Lecture # 2 Two-Dimensional Systems
x 2 v2 v2 x2 v1 v1 x1 x 1 (a) (b) Stable Node Unstable Node Nonlinear Control Lecture # 2 Two-Dimensional Systems
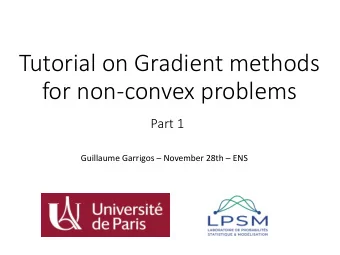
λ 2 < 0 < λ 1 e λ 1 t → ∞ , while e λ 2 t → 0 as t → ∞ Call λ 2 the stable eigenvalue ( v 2 the stable eigenvector) and λ 1 the unstable eigenvalue ( v 1 the unstable eigenvector) z 2 = cz λ 2 /λ 1 , λ 2 /λ 1 < 0 1 Saddle Nonlinear Control Lecture # 2 Two-Dimensional Systems
x 2 z2 v1 v2 x 1 z1 (a) (b) Phase Portrait of a Saddle Point Nonlinear Control Lecture # 2 Two-Dimensional Systems
Case 2. Complex eigenvalues: λ 1 , 2 = α ± jβ z 1 = αz 1 − βz 2 , ˙ z 2 = βz 1 + αz 2 ˙ � z 2 � � θ = tan − 1 z 2 1 + z 2 r = 2 , z 1 r ( t ) = r 0 e αt and θ ( t ) = θ 0 + βt α < 0 r ( t ) → 0 as t → ∞ ⇒ α > 0 ⇒ r ( t ) → ∞ as t → ∞ α = 0 r ( t ) ≡ r 0 ∀ t ⇒ Nonlinear Control Lecture # 2 Two-Dimensional Systems
(a) z2 z2 z2 (b) (c) z1 z1 z1 α < 0 α > 0 α = 0 Stable Focus Unstable Focus Center x2 x 2 x2 (b) (c) (a) x 1 x1 x 1 Nonlinear Control Lecture # 2 Two-Dimensional Systems
Effect of Perturbations A → A + δA ( δA arbitrarily small ) The eigenvalues of a matrix depend continuously on its parameters A node (with distinct eigenvalues), a saddle or a focus is structurally stable because the qualitative behavior remains the same under arbitrarily small perturbations in A A center is not structurally stable � µ � 1 , Eigenvalues = µ ± j − 1 µ µ < 0 Stable Focus , µ > 0 Unstable Focus ⇒ ⇒ Nonlinear Control Lecture # 2 Two-Dimensional Systems
Qualitative Behavior Near Equilibrium Points The qualitative behavior of a nonlinear system near an equilibrium point can take one of the patterns we have seen with linear systems. Correspondingly the equilibrium points are classified as stable node, unstable node, saddle, stable focus, unstable focus, or center Can we determine the type of the equilibrium point of a nonlinear system by linearization? Nonlinear Control Lecture # 2 Two-Dimensional Systems
Let p = ( p 1 , p 2 ) be an equilibrium point of the system x 1 = f 1 ( x 1 , x 2 ) , ˙ x 2 = f 2 ( x 1 , x 2 ) ˙ where f 1 and f 2 are continuously differentiable Expand f 1 and f 2 in Taylor series about ( p 1 , p 2 ) x 1 ˙ = f 1 ( p 1 , p 2 ) + a 11 ( x 1 − p 1 ) + a 12 ( x 2 − p 2 ) + H . O . T . x 2 ˙ = f 2 ( p 1 , p 2 ) + a 21 ( x 1 − p 1 ) + a 22 ( x 2 − p 2 ) + H . O . T . � � a 11 = ∂f 1 ( x 1 , x 2 ) a 12 = ∂f 1 ( x 1 , x 2 ) � � , � � ∂x 1 ∂x 2 � � x = p x = p a 21 = ∂f 2 ( x 1 , x 2 ) � a 22 = ∂f 2 ( x 1 , x 2 ) � � � , � � ∂x 1 ∂x 2 � � x = p x = p Nonlinear Control Lecture # 2 Two-Dimensional Systems
f 1 ( p 1 , p 2 ) = f 2 ( p 1 , p 2 ) = 0 y 1 = x 1 − p 1 y 2 = x 2 − p 2 y 1 ˙ = x 1 = a 11 y 1 + a 12 y 2 + H . O . T . ˙ y 2 ˙ = x 2 = a 21 y 1 + a 22 y 2 + H . O . T . ˙ y ≈ Ay ˙ ∂f 1 ∂f 1 � a 11 a 12 � � ∂x 1 ∂x 2 = ∂f = � � A = � � ∂x ∂f 2 ∂f 2 � � a 21 a 22 x = p � ∂x 1 ∂x 2 x = p Nonlinear Control Lecture # 2 Two-Dimensional Systems
Eigenvalues of A Type of equilibrium point of the nonlinear system λ 2 < λ 1 < 0 Stable Node λ 2 > λ 1 > 0 Unstable Node λ 2 < 0 < λ 1 Saddle α ± jβ, α < 0 Stable Focus α ± jβ, α > 0 Unstable Focus ± jβ Linearization Fails Nonlinear Control Lecture # 2 Two-Dimensional Systems
Example 2.1 − x 2 − µx 1 ( x 2 1 + x 2 x 1 ˙ = 2 ) x 1 − µx 2 ( x 2 1 + x 2 x 2 ˙ = 2 ) x = 0 is an equilibrium point ∂f � − µ (3 x 2 1 + x 2 � 2 ) − (1 + 2 µx 1 x 2 ) ∂x = − µ ( x 2 1 + 3 x 2 (1 − 2 µx 1 x 2 ) 2 ) A = ∂f � � � 0 − 1 � = � 1 0 ∂x � x =0 r = − µr 3 and ˙ x 1 = r cos θ and x 2 = r sin θ ⇒ ˙ θ = 1 Stable focus when µ > 0 and Unstable focus when µ < 0 Nonlinear Control Lecture # 2 Two-Dimensional Systems
For a saddle point, we can use linearization to generate the stable and unstable trajectories Let the eigenvalues of the linearization be λ 1 > 0 > λ 2 and the corresponding eigenvectors be v 1 and v 2 The stable and unstable trajectories will be tangent to the stable and unstable eigenvectors, respectively, as they approach the equilibrium point p For the unstable trajectories use x 0 = p ± αv 1 For the stable trajectories use x 0 = p ± αv 2 α is a small positive number Nonlinear Control Lecture # 2 Two-Dimensional Systems
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries