Neural-Symbolic Integration Strategies Neural-Symbolic Integration - PowerPoint PPT Presentation
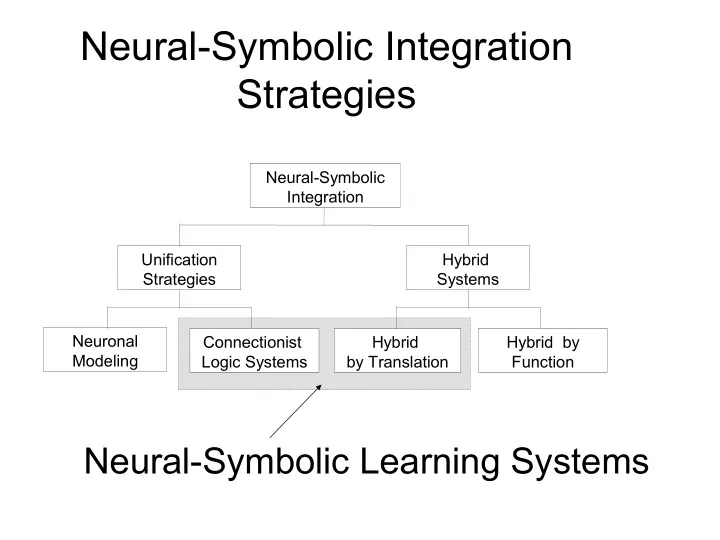
Neural-Symbolic Integration Strategies Neural-Symbolic Integration Unification Hybrid Strategies Systems Neuronal Connectionist Hybrid Hybrid by Modeling Logic Systems by Translation Function Neural-Symbolic Learning Systems CILP:
Neural-Symbolic Integration Strategies Neural-Symbolic Integration Unification Hybrid Strategies Systems Neuronal Connectionist Hybrid Hybrid by Modeling Logic Systems by Translation Function Neural-Symbolic Learning Systems
CILP: Connectionist Inductive Logic Programming System Objective : To benefit from the integration of Artificial Neural Networks and Symbolic Rules. C ← F, ~G; F ← A ← B,C,~D; A ← E,F; B ← Exploiting Background Knowledge Explanation Capability Efficient Learning Massively Parallel Computation
CILP structure Connectionist System Inference Learning Machine 2 Explanation Examples 3 4 Neural Network 1 Symbolic Symbolic Knowledge Knowledge 5 1. Adding Background Knowledge (BK) 2. Computing BK in Parallel 3. Adding Training with Examples 4. Extracting Knowledge 5. Closing the Cycle
Theory Refinement Contents Inserting Background Knowledge Performing Inductive Learning with Examples Adding Classical Negation Adding Metalevel Priorities Experimental Results
Inserting Background Knowledge A B θ A θ B Example: P = { A ← B,C,~D; W W W A ← E,F; θ 1 N 1 θ 2 N 2 θ 3 N 3 B ← } W W - W W W B C D E F Int er pr etatio ns General clause : A 0 ← A 1 …A m , ~A m+1 … ~ A n
Inserting Background Knowledge Theorem : For each general logic program P , there exists a feedforward neural network N with exactly one hidden layer and semi-linear neurons such that N computes T P . Corollary (analogous to [Holldobler and Kalinke 94]): Let P be an acceptable general program. There exists a recurrent neural network N r with semi-linear neurons such that, starting from an arbitrary initial input, N r converges to the unique stable model of P .
Computing with Background Knowledge Example: P = { A ← B,C,~D; A ← E,F; A B -(1+A min )W/2 0 B ← }. W W W Wr = 1 N1 N2 N3 Recurrently connected, N (1+A min )W (1+A min )W/2 0 converges to stable state: W W -W W W W { A = false, B = true, C = false, B C D E F T D = false, E = false, F = false } 1 Interpretations Amax Amin -1 1
CILP translation algorithm Produces neural network N given logic program P N can be trained with backpropagation subsequently Given P with clauses of the form: A if L1, ..., Lk Let p be the number of positive literals in L1, ..., Lk Let m be the number of clauses in P with A in the head Amin denotes the minimum activation for a neuron to be true Amax denotes the maximum activation for a neuron to be false Θh = (1+Amin).(k-1).W/2 (threshold of hidden neuron) ΘA = (1+Amin).(1-m).W/2 (threshold of output neuron) W > 2 (ln(1+Amin) – ln(1-Amin)) / (max(k,m).(Amin-1)+Amin+1) Amin > max(k,m)-1 / max(k,m)+1 Amax = -Amin (for simplicity)
Performing Inductive Learning with Background Knowledge • Neural Networks may be trained with examples to approximate the operator T P associated with a Logic Program P . • A differentiable activation function, e.g. the bipolar semi-linear function h(x) = (2 / (1 + e -x )) - 1, allows efficient learning with Backpropagation.
Performing Inductive Learning with Background Knowledge We add extra input, output and hidden neurons, depending on the application We fully-connect the network We use Backpropagation
Adding classical negation General Program: Extended Program: Cross ← ~ Train Cross ← ¬ Train School bus crosses School bus crosses rail rail line in the absence line if there is proof of of proof of approaching no approaching train train Extended clause : L 0 ← L 1 …L m , ~L m+1 … ~ L n
The Extended CILP System A B ¬ C r 1 : A ← B, ¬C; W W W r 2 : ¬C ← B, ~ ¬E; N1 N2 N3 r 3 : B ← ~D W -W -W W W ¬ C ¬ E B D
Adding Classical Negation Theorem : For each extended logic program P , there exists a feedforward neural network N with exactly one hidden layer and semi-linear neurons such that N computes T P . Corollary : Let P be a consistent acceptable extended program. There exists a recurrent neural network N r with semi- linear neurons such that, starting from an arbitrary initial input, N r converges to the unique answer set of P .
Computing with Classical Negation Example: P = { B ← ~ C; A ¬ B B A ← B, ~ ¬ D; ¬ B ← A }. W W W N 1 N 3 N 2 Recurrently connected, N converges to stable state: -W W -W W { A = true, B = true, ¬ B = true, ¬ D A B C C = false, ¬ D = false }
Adding Metalevel Priorities ¬ x x -nW W r 1 r 2 d e b c a r1 > r2 = “ x is preferred over ¬ x ”, i.e. when r1 fires it should block the output of r2
Learning Metalevel Priorities ¬ guilty guilty P = { r 1 : guilty ← fingertips, r 2 : ¬guilty ← alibi, r 3 : guilty ← supergrass } r 1 r 2 r 3 r1 > r2 > r3 Training examples include: [(-1, 1, *), (-1, 1)] fingertips alibi super-grass [( 1, *, *), ( 1, -1)] where * means “ don’t care ”
Learning Metalevel Priorities ¬ guilty guilty W guilty, r1 = 3.97, W guilty, r2 = – 1.93, W ¬ guilty, r1 = – 1.93 r 1 r 2 r 3 W guilty, r3 = 1.94, W ¬ guilty, r2 = 1.94 W ¬ guilty, r3 = 0.00 fingertips alibi super-grass θ guilty = – 1.93, θ ¬ guilty = 1.93 r1 > r2 > r3 ?
Setting Linearly Ordered Theories W guilty,r3 = W W guilty,r2 = – W + δ ¬ guilty guilty W guilty,r1 = W guilty,r3 – W guilty,r2 + δ = 2W If W = 2, δ = 0.01: r 1 r 2 r 3 W guilty,r3 = 2 W guilty,r2 = – 1.99 W guilty,r1 = 4 fingertips alibi super-grass -3 < θ guilty < 1 r1 > r2 > r3 -1 < θ ¬ guilty < 3
Partially Ordered Theories X ¬X r2 > r1 r3 > r1 r 1 r 2 r 3 r 4 r4 > r1 Each of r 2 , r 3 and r 4 should block the conclusion of r 1
Problematic Case layEggs(platypus) monotreme(platypus) hasFur(platypus) hasBill(platypus) r1: mammal(x) ← monotreme(x) r2: mammal(x) ← hasFur(x) r1 > r3 r3: ¬ mammal(x) ← layEggs(x) r2 > r4 r4: ¬ mammal(x) ← hasBill(x) Cannot have r1 > r3, r2 > r4 without also having r1 > r4 and r2 > r3
CILP Experimental Results Test Set Performance (how well it generalises) Test Set Performance over small/increasing training sets (how important BK is) Training Set Performance (how fast it trains)
CILP Experimental Results • Promoter Recognition: ♦ A short DNA sequence that preceeds the beginning of genes. Background Knowledge Promoter ← Contact, Conformation Contact ← Minus10, Minus35 ← @ -14 ‘tataat’ ← @ -13 ‘ta’, @ -10 ‘a’, @ -8 ‘t’ Minus 10 Minus 10 ← @ -13 ‘tataat’ ← @ -12 ‘ta’, @ -7 ‘t’ Minus 10 Minus 10 ← @ -37 ‘cttgac’ ← @ -36 ‘ttgac’ Minus 35 Minus 35 ← @ -36 ‘ttgaca’ ← @ -36 ‘ttg’, @ -32 ‘ca’ Minus 35 Minus 35 ← @ -45 ‘aa’, @ -41 ‘a’ Conformation Conformation ← @ -45 ‘a’, @ -41 ‘a’, @ -28 ‘tt’, @ -23 ‘t’, @ -21 ‘aa’, @ -17 ‘t’, @ -15 ‘t’, @ -4 ‘t’ Conformation ← @ -49 ‘a’, @ -44 ‘t’, @ -27 ‘t’, @ -22 ‘a’, @ -18 ‘t’, @ -16 ‘tg’, @ -1 ‘a’ Conformation ← @ -47 ‘caa’, @-43 ‘tt’, @-40 ‘ac’, @-22 ‘g’, @-18 ‘t’, @-16 ‘c’, @-8 ‘gcgcc’, @-2 ‘cc’
An Example Bioinformatics Rule Minus5 ← @-1'gc', @5't' Minus5 . . . a a g t c a g t c a g t c @-1 @1 @5
Promoter Recognition 53 examples of promoters 53 examples of non -promoters Initial Topology of the Network Minus35 Minus10 Conform. Contact Promoter -50 DNA +7 Minus35 Minus10 Conform. Contact
Test Set Performance (promoter recognition) • Comparison with systems that learn from examples only (i.e. no BK) C-IL2P 97.2 Backprop 94.3 Cobweb 94.3 P erceptron 91.5 ID3 80.2 Storm o 93.4 0 10 20 30 40 50 60 70 80 90 100 Test Set P erform ance
Test Set Performance (promoter recognition) • Comparison with systems that learn from examples and background knowledge KBCNN 98.1 C-IL2P 97.2 KBANN 92.5 Labyrinth 86.8 FOCL 85.8 E ither 79.0 0 10 20 30 40 50 60 70 80 90 100 Test Set P erformance
Test set performance on small/increasing training sets • Promoter recognition: comparison with Backprop and KBANN 0.6 0.5 0.4 B a c k p 0.3 K B A N C - I L 2 P 0.2 0.1 0 0 20 40 60 80 N u m b e r o f T r a i n i n
Training Set Performance (promoter recognition) • Comparison with Backprop and KBANN 0.6 0.5 RMS Error Rate 0.4 Backprop 0.3 KBANN C-IL2P 0.2 0.1 0 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 Training Epochs
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.