Modelling and analyzing resources in timed systems Patricia - PowerPoint PPT Presentation
Modelling and analyzing resources in timed systems Patricia Bouyer-Decitre LSV, CNRS & ENS Cachan, France 1/45 Introduction Outline 1. Introduction 2. Modelling and optimizing resources in timed systems 3. Managing resources 4.
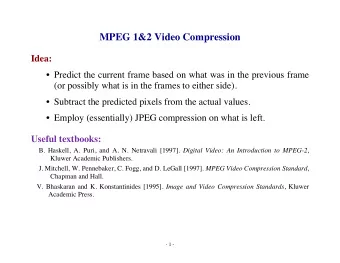
Modelling and optimizing resources in timed systems Modelling resources in timed systems System resources might be relevant and even crucial information energy consumption, memory usage, price to pay, bandwidth, ... � timed automata are not powerful enough! A possible solution: use hybrid automata The thermostat example T ≤ 19 22 Off On 21 ˙ ˙ T = − 0 . 5 T T =2 . 25 − 0 . 5 T 19 ( T ≥ 18) ( T ≤ 22) 18 T ≥ 21 2 4 6 8 10 time 12/45
Modelling and optimizing resources in timed systems Modelling resources in timed systems System resources might be relevant and even crucial information energy consumption, memory usage, price to pay, bandwidth, ... � timed automata are not powerful enough! A possible solution: use hybrid automata Theorem [HKPV95] The reachability problem is undecidable in hybrid automata. [HKPV95] Henzinger, Kopke, Puri, Varaiya. What’s decidable wbout hybrid automata? (SToC’95) . 12/45
Modelling and optimizing resources in timed systems Modelling resources in timed systems System resources might be relevant and even crucial information energy consumption, memory usage, price to pay, bandwidth, ... � timed automata are not powerful enough! A possible solution: use hybrid automata Theorem [HKPV95] The reachability problem is undecidable in hybrid automata. An alternative: weighted/priced timed automata [ALP01,BFH+01] � hybrid variables do not constrain the system hybrid variables are observer variables [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 12/45
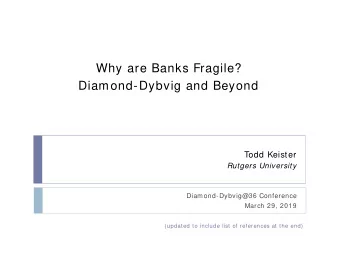
Modelling and optimizing resources in timed systems A third model of the system Oxford x :=0 x :=0 x :=0 0 = : x + 3 + 3 + 3 + 3 21 ≤ x ≤ 24 10 ≤ x ≤ 12 12 ≤ x ≤ 15 Dover 9 ≤ x ≤ 15 Poole Stansted x =27 x :=0 14 ≤ x ≤ 15 x =17 + 2 London + 2 x :=0 x =3 + 2 + 7 x :=0 Calais 27 ≤ x ≤ 30 x :=0 x :=0 + 1 St Malo Nantes 1 7 + 3 ≤ x =13 x ≤ x =6 x : 2 x :=0 = 1 0 x :=0 + 2 Paris 6 3 ≤ ≤ x x + 3 + 3 ≤ ≤ 0 x 3 6 = : = : 2 x 0 + 3 + 2 7 4 9 ≤ 4 1 ≤ 2 ≤ x x = x ≤ ≤ ≤ 1 x 2 2 3 1 2 Pontivy 13/45
Modelling and optimizing resources in timed systems How much fuel will I use? Oxford x :=0 x :=0 x :=0 0 = : x + 3 + 3 + 3 + 3 21 ≤ x ≤ 24 10 ≤ x ≤ 12 12 ≤ x ≤ 15 Dover 9 ≤ x ≤ 15 Poole Stansted x =27 x :=0 14 ≤ x ≤ 15 x =17 + 2 London + 2 x :=0 x =3 + 2 + 7 x :=0 Calais 27 ≤ x ≤ 30 x :=0 x :=0 + 1 St Malo Nantes 1 7 + 3 ≤ x =13 x ≤ x =6 x : 2 x :=0 = 1 0 x :=0 + 2 Paris 6 3 ≤ ≤ x x + 3 + 3 ≤ ≤ 0 x 3 6 = : = : 2 x 0 + 3 + 2 7 4 9 ≤ 4 1 ≤ 2 ≤ x x = x ≤ ≤ ≤ 1 x 2 2 3 1 2 Pontivy It is a quantitative (optimization) problem in a priced timed automaton: at least 68 anti-planet units! 13/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : 6 . 5 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : 6 . 5 + 0 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : 6 . 5 + 0 + 0 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : 6 . 5 + 0 + 0 + 0 . 7 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : 6 . 5 + 0 + 0 + 0 . 7 + 7 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 1 . 3 c u 0 . 7 c → � ℓ 0 − − → ℓ 0 − − → ℓ 1 − − → ℓ 3 − − − → ℓ 3 − − x 0 1 . 3 1 . 3 1 . 3 2 y 0 1 . 3 0 0 0 . 7 cost : 6 . 5 + 0 + 0 + 0 . 7 + 7 = 14 . 2 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost for reaching � ? [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost for reaching � ? 5 t + 10(2 − t ) + 1 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost for reaching � ? 5 t + 10(2 − t ) + 1 , 5 t + (2 − t ) + 7 [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost for reaching � ? min ( 5 t + 10(2 − t ) + 1 , 5 t + (2 − t ) + 7 ) [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost for reaching � ? 0 ≤ t ≤ 2 min ( 5 t + 10(2 − t ) + 1 , 5 t + (2 − t ) + 7 ) = 9 inf [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems Weighted/priced timed automata [ALP01,BFH+01] + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost for reaching � ? 0 ≤ t ≤ 2 min ( 5 t + 10(2 − t ) + 1 , 5 t + (2 − t ) + 7 ) = 9 inf � strategy: leave immediately ℓ 0 , go to ℓ 3 , and wait there 2 t.u. [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . 14/45
Modelling and optimizing resources in timed systems The region abstraction is not fine enough time elapsing reset to 0 15/45
Modelling and optimizing resources in timed systems The corner-point abstraction 0 3 0 0 7 0 0 3 7 16/45
Modelling and optimizing resources in timed systems The corner-point abstraction 0 3 0 0 7 0 0 3 7 We can somehow discretize the behaviours... 16/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Optimal reachability as a linear programming problem 17/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Optimal reachability as a linear programming problem t 1 t 2 t 3 t 4 t 5 ⋅⋅⋅ 17/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Optimal reachability as a linear programming problem 8 t 1 t 2 t 3 t 4 t 5 t 1 + t 2 ≤ 2 < ⋅⋅⋅ x ≤ 2 : 17/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Optimal reachability as a linear programming problem 8 t 1 t 2 t 3 t 4 t 5 t 1 + t 2 ≤ 2 < ⋅⋅⋅ y :=0 x ≤ 2 y ≥ 5 t 2 + t 3 + t 4 ≥ 5 : 17/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Optimal reachability as a linear programming problem 8 t 1 t 2 t 3 t 4 t 5 t 1 + t 2 ≤ 2 < ⋅⋅⋅ y :=0 x ≤ 2 y ≥ 5 t 2 + t 3 + t 4 ≥ 5 : Lemma Let Z be a bounded zone and f be a function n X f : ( t 1 , ..., t n ) �→ c i t i + c i =1 well-defined on Z . Then inf Z f is obtained on the border of Z with integer coordinates. 17/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Optimal reachability as a linear programming problem 8 t 1 t 2 t 3 t 4 t 5 t 1 + t 2 ≤ 2 < ⋅⋅⋅ y :=0 x ≤ 2 y ≥ 5 t 2 + t 3 + t 4 ≥ 5 : Lemma Let Z be a bounded zone and f be a function n X f : ( t 1 , ..., t n ) �→ c i t i + c i =1 well-defined on Z . Then inf Z f is obtained on the border of Z with integer coordinates. � for every finite path 휋 in 풜 , there exists a path Π in 풜 cp such that cost(Π) ≤ cost( 휋 ) [Π is a “corner-point projection” of 휋 ] 17/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , 18/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , for any 휀 > 0, 18/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , for any 휀 > 0, there exists a path 휋 휀 of 풜 s.t. ∥ Π − 휋 휀 ∥ ∞ < 휀 18/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , for any 휀 > 0, there exists a path 휋 휀 of 풜 s.t. ∥ Π − 휋 휀 ∥ ∞ < 휀 For every 휂 > 0, there exists 휀 > 0 s.t. ∥ Π − 휋 휀 ∥ ∞ < 휀 ⇒ ∣ cost(Π) − cost( 휋 휀 ) ∣ < 휂 18/45
Modelling and optimizing resources in timed systems Optimal-cost reachability Theorem [ALP01,BFH+01,BBBR07] The optimal-cost reachability problem is decidable (and PSPACE-complete) in (priced) timed automata. [ALP01] Alur, La Torre, Pappas. Optimal paths in weighted timed automata (HSCC’01) . [BFH+01] Behrmann, Fehnker, Hune, Larsen, Pettersson, Romijn, Vaandrager. Minimum-cost reachability in priced timed automata (HSCC’01) . [BBBR07] Bouyer, Brihaye, Bruy` ere, Raskin. On the optimal reachability problem (Formal Methods in System Design) . 19/45
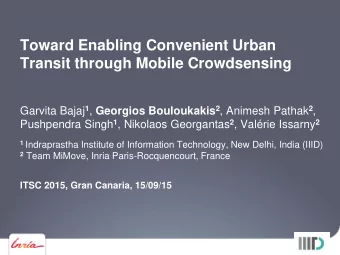
Modelling and optimizing resources in timed systems Going further 1: mean-cost optimization att?, x :=0 att! x = D z ≥ S z :=0 ˙ C = p ( x ≤ D ) High Op Low ˙ ˙ R = g C = P ˙ R = G x :=0 att? [BBL08] Bouyer, Brinksma, Larsen. Optimal infinite scheduling for multi-priced timed automata (Formal Methods in System Designs) . 20/45
Modelling and optimizing resources in timed systems Going further 1: mean-cost optimization att?, x :=0 att! x = D z ≥ S z :=0 ˙ C = p ( x ≤ D ) High Op Low ˙ ˙ R = g C = P ˙ R = G x :=0 att? � compute optimal infinite schedules that minimize cost( 휋 n ) mean-cost( 휋 ) = lim sup reward( 휋 n ) n → + ∞ [BBL08] Bouyer, Brinksma, Larsen. Optimal infinite scheduling for multi-priced timed automata (Formal Methods in System Designs) . 20/45
Modelling and optimizing resources in timed systems Going further 1: mean-cost optimization att?, x :=0 att! x = D z ≥ S z :=0 ˙ C = p ( x ≤ D ) High Op Low ˙ ˙ R = g C = P ˙ R = G x :=0 att? � compute optimal infinite schedules that minimize cost( 휋 n ) mean-cost( 휋 ) = lim sup reward( 휋 n ) n → + ∞ H H M 1 M 1 L L H H M 2 M 2 L L O O 1 1 2 1 1 1 1 1 Time Time 4 8 12 16 4 8 12 16 Schedule with ratio ≈ 1 . 455 Schedule with ratio ≈ 1 . 478 [BBL08] Bouyer, Brinksma, Larsen. Optimal infinite scheduling for multi-priced timed automata (Formal Methods in System Designs) . 20/45
Modelling and optimizing resources in timed systems Going further 1: mean-cost optimization att?, x :=0 att! x = D z ≥ S z :=0 ˙ C = p ( x ≤ D ) High Op Low ˙ ˙ R = g C = P ˙ R = G x :=0 att? � compute optimal infinite schedules that minimize cost( 휋 n ) mean-cost( 휋 ) = lim sup reward( 휋 n ) n → + ∞ Theorem [BBL08] The mean-cost optimization problem is decidable (and PSPACE-complete) for priced timed automata. � the corner-point abstraction can be used [BBL08] Bouyer, Brinksma, Larsen. Optimal infinite scheduling for multi-priced timed automata (Formal Methods in System Designs) . 20/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Finite behaviours: based on the following property Lemma Let Z be a bounded zone and f be a function P n i =1 c i t i + c f : ( t 1 , ..., t n ) �→ P n i =1 r i t i + r well-defined on Z . Then inf Z f is obtained on the border of Z with integer coordinates. 21/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Finite behaviours: based on the following property Lemma Let Z be a bounded zone and f be a function P n i =1 c i t i + c f : ( t 1 , ..., t n ) �→ P n i =1 r i t i + r well-defined on Z . Then inf Z f is obtained on the border of Z with integer coordinates. � for every finite path 휋 in 풜 , there exists a path Π in 풜 cp s.t. mean-cost(Π) ≤ mean-cost( 휋 ) 21/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Finite behaviours: based on the following property Lemma Let Z be a bounded zone and f be a function P n i =1 c i t i + c f : ( t 1 , ..., t n ) �→ P n i =1 r i t i + r well-defined on Z . Then inf Z f is obtained on the border of Z with integer coordinates. � for every finite path 휋 in 풜 , there exists a path Π in 풜 cp s.t. mean-cost(Π) ≤ mean-cost( 휋 ) Infinite behaviours: decompose each sufficiently long projection into cycles: The (acyclic) linear part will be negligible! 21/45
Modelling and optimizing resources in timed systems From timed to discrete behaviours Finite behaviours: based on the following property Lemma Let Z be a bounded zone and f be a function P n i =1 c i t i + c f : ( t 1 , ..., t n ) �→ P n i =1 r i t i + r well-defined on Z . Then inf Z f is obtained on the border of Z with integer coordinates. � for every finite path 휋 in 풜 , there exists a path Π in 풜 cp s.t. mean-cost(Π) ≤ mean-cost( 휋 ) Infinite behaviours: decompose each sufficiently long projection into cycles: The (acyclic) linear part will be negligible! � the optimal cycle of 풜 cp is better than any infinite path of 풜 ! 21/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , 22/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , for any 휀 > 0, 22/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , for any 휀 > 0, there exists a path 휋 휀 of 풜 s.t. ∥ Π − 휋 휀 ∥ ∞ < 휀 22/45
Modelling and optimizing resources in timed systems From discrete to timed behaviours Approximation of abstract paths: For any path Π of 풜 cp , for any 휀 > 0, there exists a path 휋 휀 of 풜 s.t. ∥ Π − 휋 휀 ∥ ∞ < 휀 For every 휂 > 0, there exists 휀 > 0 s.t. ∥ Π − 휋 휀 ∥ ∞ < 휀 ⇒ ∣ mean-cost(Π) − mean-cost( 휋 휀 ) ∣ < 휂 22/45
Modelling and optimizing resources in timed systems Going further 2: concavely-priced cost functions � A general abstract framework for quantitative timed systems Theorem [JT08] Optimal cost in concavely-priced timed automata is computable, if we restrict to quasi-concave price functions. For the following cost functions, the (decision) problem is even PSPACE-complete: optimal-time and optimal-cost reachability; optimal discrete discounted cost; optimal average-time and average-cost; optimal mean-cost. � a slight extension of corner-point abstraction can be used [JT08] Judzi´ nski, Trivedi. Concavely-priced timed automata (FORMATS’08) . 23/45
Modelling and optimizing resources in timed systems Going further 3: discounted-time cost optimization Globally, ( z ≤ 8) x =3 , x :=0 x =3 ( x ≤ 3) ( x ≤ 3) deg deg High Med Low + 9 + 2 + 5 att att + 2 + 1 z ≥ 2 , x , z :=0 z ≥ 2 , z :=0 [FL08] Fahrenberg, Larsen. Discount-optimal infinite runs in priced timed automata (INFINITY’08) . 24/45
Modelling and optimizing resources in timed systems Going further 3: discounted-time cost optimization Globally, ( z ≤ 8) x =3 , x :=0 x =3 ( x ≤ 3) ( x ≤ 3) deg deg High Med Low + 9 + 2 + 5 att att + 2 + 1 z ≥ 2 , x , z :=0 z ≥ 2 , z :=0 � compute optimal infinite schedules that minimize discounted cost over time [FL08] Fahrenberg, Larsen. Discount-optimal infinite runs in priced timed automata (INFINITY’08) . 24/45
Modelling and optimizing resources in timed systems Going further 3: discounted-time cost optimization Globally, ( z ≤ 8) x =3 , x :=0 x =3 ( x ≤ 3) ( x ≤ 3) deg deg High Med Low + 9 + 2 + 5 att att + 2 + 1 z ≥ 2 , x , z :=0 z ≥ 2 , z :=0 � compute optimal infinite schedules that minimize ∫ 휏 n +1 a n +1 ∑ 휆 T n 휆 t cost( ℓ n ) d t + 휆 T n +1 cost( ℓ n discounted-cost 휆 ( 휋 ) = − − → ℓ n +1 ) t =0 n ≥ 0 휏 1 , a 1 휏 2 , a 2 if 휋 = ( ℓ 0 , v 0 ) − − − → ( ℓ 1 , v 1 ) − − − → ⋅ ⋅ ⋅ and T n = ∑ i ≤ n 휏 i [FL08] Fahrenberg, Larsen. Discount-optimal infinite runs in priced timed automata (INFINITY’08) . 24/45
Modelling and optimizing resources in timed systems Going further 3: discounted-time cost optimization Globally, ( z ≤ 8) x =3 , x :=0 x =3 ( x ≤ 3) ( x ≤ 3) deg deg High Med Low + 9 + 2 + 5 att att + 2 + 1 z ≥ 2 , x , z :=0 z ≥ 2 , z :=0 � compute optimal infinite schedules that minimize discounted cost over time [FL08] Fahrenberg, Larsen. Discount-optimal infinite runs in priced timed automata (INFINITY’08) . 24/45
Modelling and optimizing resources in timed systems Going further 3: discounted-time cost optimization Globally, ( z ≤ 8) x =3 , x :=0 x =3 ( x ≤ 3) ( x ≤ 3) deg deg High Med Low + 9 + 2 + 5 att att + 2 + 1 z ≥ 2 , x , z :=0 z ≥ 2 , z :=0 � compute optimal infinite schedules that minimize discounted cost over time if 휆 = e − 1 , the discounted cost of that infinite schedule is ≈ 2 . 16 0 3 6 7 9 [FL08] Fahrenberg, Larsen. Discount-optimal infinite runs in priced timed automata (INFINITY’08) . 24/45
Modelling and optimizing resources in timed systems Going further 3: discounted-time cost optimization Globally, ( z ≤ 8) x =3 , x :=0 x =3 ( x ≤ 3) ( x ≤ 3) deg deg High Med Low + 9 + 2 + 5 att att + 2 + 1 z ≥ 2 , x , z :=0 z ≥ 2 , z :=0 � compute optimal infinite schedules that minimize discounted cost over time Theorem [FL08] The optimal discounted cost is computable in EXPTIME in priced timed automata. � the corner-point abstraction can be used [FL08] Fahrenberg, Larsen. Discount-optimal infinite runs in priced timed automata (INFINITY’08) . 24/45
Modelling and optimizing resources in timed systems A fourth model of the system What if there is an unexpected event? Oxford x :=0 x :=0 x :=0 0 = : x + 3 + 3 + 3 + 3 21 ≤ x ≤ 24 10 ≤ x ≤ 12 12 ≤ x ≤ 15 Dover 9 ≤ x ≤ 15 Poole Stansted x =27 x :=0 14 ≤ x ≤ 15 x =17 + 2 London + 2 x :=0 x =3 + 2 + 7 x :=0 27 ≤ x ≤ 30 Calais x :=0 x :=0 + 1 St Malo Nantes 1 7 + 3 ≤ x x =13 x =6 ≤ x : 2 x :=0 = 1 0 x :=0 + 2 Paris 6 3 ≤ ≤ x x + 3 + 3 ≤ ≤ 0 x 3 6 = : = : + 3 2 x 0 + 2 7 9 4 ≤ 4 1 ≤ 2 ≤ x x = x ≤ ≤ ≤ 1 x 2 2 3 1 2 Pontivy 25/45
Modelling and optimizing resources in timed systems A fourth model of the system What if there is an unexpected event? Oxford x :=0 x :=0 x :=0 0 = : x + 3 + 3 + 3 + 3 21 ≤ x ≤ 24 10 ≤ x ≤ 12 12 ≤ x ≤ 15 Dover Flight 9 ≤ x ≤ 15 Poole Stansted x =27 cancelled! x :=0 14 ≤ x ≤ 15 x =17 + 2 London + 2 x :=0 x =3 + 2 + 7 x :=0 27 ≤ x ≤ 30 Calais x :=0 x :=0 + 1 St Malo Nantes 1 7 + 3 ≤ x x =13 x =6 ≤ x : 2 x :=0 = 1 0 x :=0 + 2 On strike!!! Paris 6 3 ≤ ≤ x x + 3 + 3 ≤ ≤ 0 x 3 6 = : = : + 3 2 x 0 + 2 7 9 4 ≤ 4 1 ≤ 2 ≤ x x = x ≤ ≤ ≤ 1 x 2 2 3 1 2 Pontivy 25/45
Modelling and optimizing resources in timed systems A fourth model of the system What if there is an unexpected event? Oxford x :=0 x :=0 x :=0 0 = : x + 3 + 3 + 3 + 3 21 ≤ x ≤ 24 10 ≤ x ≤ 12 12 ≤ x ≤ 15 Dover Flight 9 ≤ x ≤ 15 Poole Stansted x =27 cancelled! x :=0 14 ≤ x ≤ 15 x =17 + 2 London + 2 x :=0 x =3 + 2 + 7 x :=0 27 ≤ x ≤ 30 Calais x :=0 x :=0 + 1 St Malo Nantes 1 7 + 3 ≤ x x =13 x =6 ≤ x : 2 x :=0 = 1 0 x :=0 + 2 On strike!!! Paris 6 3 ≤ ≤ x x + 3 + 3 ≤ ≤ 0 x 3 6 = : = : + 3 2 x 0 + 2 7 9 4 ≤ 4 1 ≤ 2 ≤ x x = x ≤ ≤ ≤ 1 x 2 2 3 1 2 Pontivy � modelled as timed games 25/45
Modelling and optimizing resources in timed systems A simple example of timed game ℓ 2 x =2 , c u x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 ( y =0) u x =2 , c ℓ 3 26/45
Modelling and optimizing resources in timed systems A simple example of timed game ℓ 2 x =2 , c u x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 ( y =0) u x =2 , c ℓ 3 26/45
Modelling and optimizing resources in timed systems Another example ( x ≤ 2) x ≥ 1 � ℓ 0 x ≤ 1 x ≥ 2 � x < 1 , x :=0 ℓ 1 x < 1 ℓ 2 x ≤ 1 ℓ 3 27/45
Modelling and optimizing resources in timed systems Decidability of timed games Theorem [AMPS98,HK99] Safety and reachability control in timed automata are decidable and EXPTIME-complete. [AMPS98] Asarin, Maler, Pnueli, Sifakis. Controller synthesis for timed automata (SSC’98) . [HK99] Henzinger, Kopke. Discrete-time control for rectangular hybrid automata (Theoretical Computer Science) . 28/45
Modelling and optimizing resources in timed systems Decidability of timed games Theorem [AMPS98,HK99] Safety and reachability control in timed automata are decidable and EXPTIME-complete. (the attractor is computable...) [AMPS98] Asarin, Maler, Pnueli, Sifakis. Controller synthesis for timed automata (SSC’98) . [HK99] Henzinger, Kopke. Discrete-time control for rectangular hybrid automata (Theoretical Computer Science) . 28/45
Modelling and optimizing resources in timed systems Decidability of timed games Theorem [AMPS98,HK99] Safety and reachability control in timed automata are decidable and EXPTIME-complete. (the attractor is computable...) � classical regions are sufficient for solving such problems [AMPS98] Asarin, Maler, Pnueli, Sifakis. Controller synthesis for timed automata (SSC’98) . [HK99] Henzinger, Kopke. Discrete-time control for rectangular hybrid automata (Theoretical Computer Science) . 28/45
Modelling and optimizing resources in timed systems Decidability of timed games Theorem [AMPS98,HK99] Safety and reachability control in timed automata are decidable and EXPTIME-complete. (the attractor is computable...) � classical regions are sufficient for solving such problems Theorem [AM99,BHPR07,JT07] Optimal-time reachability timed games are decidable and EXPTIME-complete. [AM99] Asarin, Maler. As soon as possible: time optimal control for timed automata (HSCC’99) . [BHPR07] Brihaye, Henzinger, Prabhu, Raskin. Minimum-time reachability in timed games (ICALP’07) . [JT07] Jurdzin´ nski, Trivedi. Reachability-time games on timed automata (ICALP’07) . 28/45
Modelling and optimizing resources in timed systems Decidability of timed games Theorem [AMPS98,HK99] Safety and reachability control in timed automata are decidable and EXPTIME-complete. (the attractor is computable...) � classical regions are sufficient for solving such problems Theorem [AM99,BHPR07,JT07] Optimal-time reachability timed games are decidable and EXPTIME-complete. � let’s play with Uppaal Tiga! [BCD+07] [BCD+07] Behrmann, Cougnard, David, Fleury, Larsen, Lime. Uppaal-Tiga: Time for playing games! (CAV’07) . 28/45
Modelling and optimizing resources in timed systems Back to the simple example ℓ 2 x =2 , c u x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 ( y =0) x =2 , c u ℓ 3 29/45
Modelling and optimizing resources in timed systems Back to the simple example + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 29/45
Modelling and optimizing resources in timed systems Back to the simple example + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost we can ensure while reaching � ? 29/45
Modelling and optimizing resources in timed systems Back to the simple example + 10 ℓ 2 x =2 , c u + 1 x ≤ 2 , c , y :=0 � ℓ 0 ℓ 1 + 7 + 5 ( y =0) u x =2 , c ℓ 3 + 1 Question: what is the optimal cost we can ensure while reaching � ? 5 t + 10(2 − t ) + 1 29/45
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.