
SLIDE 1
LP duality cheat sheet min cx + dy s.t. max pv + qw s.t. Ax - - PDF document
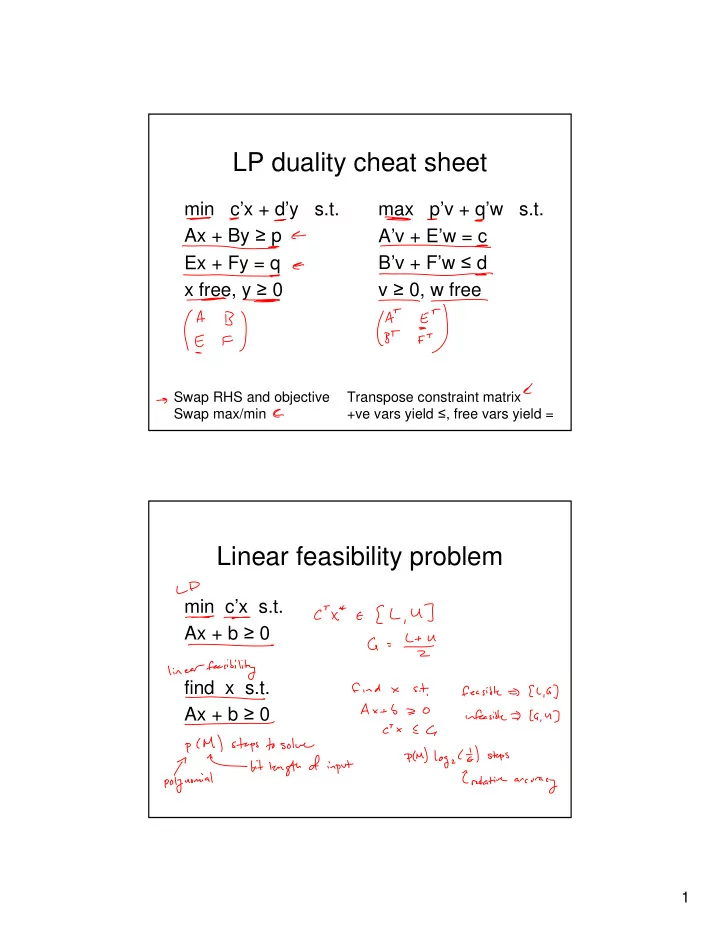
LP duality cheat sheet min cx + dy s.t. max pv + qw s.t. Ax + By p Av + Ew = c Bv + Fw d Ex + Fy = q x free, y 0 v 0, w free Swap RHS and objective Transpose constraint matrix +ve vars yield ,
Tw – b) ≥ 1 – si
Tw)