Lecture 11 Controller Specifications CL-417 Process Control Prof. - PowerPoint PPT Presentation
Lecture 11 Controller Specifications CL-417 Process Control Prof. Kannan M. Moudgalya IIT Bombay Wednesday, 14 August 2013 1/45 CL-417 Process Control Control Specification Outline 1. Closed loop as a second order system 2. Expressions for
Lecture 11 Controller Specifications CL-417 Process Control Prof. Kannan M. Moudgalya IIT Bombay Wednesday, 14 August 2013 1/45 CL-417 Process Control Control Specification
Outline 1. Closed loop as a second order system 2. Expressions for performance requirement 3. Desired region 2/45 CL-417 Process Control Control Specification
1. Closed loop as a second order system 3/45 CL-417 Process Control Control Specification
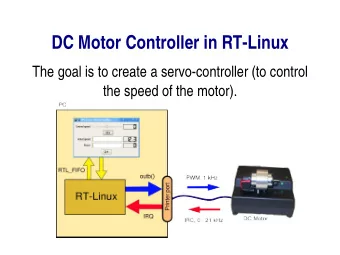
Recall Feedback Control of Mixing Control Mixture Valve A, B AC x 1 , w 1 Pure A x 2 = 1 w 2 =? AT x , w We will see a schematic of it in the next page 4/45 CL-417 Process Control Control Specification
Closed loop feedback diagram G d Y Y sp Y m E � � P U in K v U 1 + 1 K m G c = K c K Ip G v = G p τ i s τ v s + 1 − G m It has transfer functions for the measurement system, valve and the controller. 5/45 CL-417 Process Control Control Specification
Block diagram of transfer function model K 1 K 2 ∆h(s) = τ s + 1∆Q i (s) − τ s + 1∆x(s) Disturbance ∆ Q i Variable K 1 τs + 1 + ∆ x ∆ h K 2 − τs + 1 Manipulated Controlled Variable Variable K 2 block replaces 3 blocks in full schematic! 6/45 CL-417 Process Control Control Specification
Work with Simplified Feedback Control System: Flow Control System ∆ Q i K 1 τs + 1 e ∆ x ∆ h Setpoint − K 2 G c τs + 1 − 7/45 CL-417 Process Control Control Specification
Closed loop system v r e u y G c G − ◮ G c : controller, G: plant ◮ Derive the closed loop transfer function between r and y: GG c G cl = , y(s) = G cl r(s) 1 + GG c ◮ To do: derive the transfer function between v and y 8/45 CL-417 Process Control Control Specification
G cl as a Second Order System GG c ◮ G cl = 1 + GG c ◮ When will G cl be a second order system ◮ If G c = K a constant and G a second order system ◮ If G c and G both are first order systems 9/45 CL-417 Process Control Control Specification
Identify the false statement We model the closed loop system as second order, because 1. Need a simple model that has oscillations 2. Second order underdampled system is the simplest 3. All closed loop systems can be modelled as a second order system Answer: 3 10/45 CL-417 Process Control Control Specification
Why Model a Second Order System ◮ Need a simple model that has oscillations ◮ Second order underdampled system is the simplest ◮ Would want the closed loop system to be fast ◮ So we want the closed loop system to be underdamped second order ◮ Instead of writing G cl , we will denote the closed loop transfer function as simply G from now on 11/45 CL-417 Process Control Control Specification
Recall: Step response of second order system K Y(s) = τ 2 s 2 + 2 ζτ s + 1U(s) ◮ Let U(s) = 1 / s, calculate Y(s) and invert it. ◮ For ζ values of < 1, = 1 and > 1 ◮ How would you calculate? 13/45 CL-417 Process Control Control Specification
Underdamped system We studied second order systems, K G(s) = τ 2 s 2 + 2 ζτ s + 1 Also consider an equivalent and popular representation with gain K = 1: ω 2 n G(s) = s 2 + 2 ζω n s + ω 2 n ◮ ω n : natural frequency, ζ : damping factor. ◮ For ζ < 1, get an underdamped system ◮ Calculate the roots for ζ < 1 14/45 CL-417 Process Control Control Specification
Solution to underdamped system Underdamped second order system: ω 2 n G(s) = s 2 + 2 ζω n s + ω 2 n � 1 − ζ 2 For ζ < 1, rts of den. = − ζω n ± j ω n The step response is, y(t) = 1 � � � − e − ζω n t 1 − ζ 2 � 1 − ζ 2 t + tan − 1 1 − ζ 2 sin ω n � ζ We will consider the underdamped case only in the rest of this lecture 15/45 CL-417 Process Control Control Specification
Step response of underdamped system M p y ( t ) t r t p t s 16/45 CL-417 Process Control Control Specification
2. Expressions for performance requirement 17/45 CL-417 Process Control Control Specification
Performance Requirements ◮ Rise time t r is the time required for y(t) to reach the final value (1 in this case) the first time ◮ Peak time t p is when the first peak occurs ◮ M p is the corresponding overshoot ◮ t s is the settling time at which the response y(t) enters a tube around the steady state and stays within it Want t r , M p , t s to be small 18/45 CL-417 Process Control Control Specification
Step response of underdamped system Want (a) t r , (b) M p , (c) t s to be small M p y ( t ) t r t p t s Want to translate this to conditions on ω 2 n G(s) = s 2 + 2 ζω n s + ω 2 n � 1 − ζ 2 or on the poles: = − ζω n ± j ω n 19/45 CL-417 Process Control Control Specification
Translation of performance requirement to pole locations We want to translate performance conditions on to pole locations, because 1. We want to get simple expressions for performance requirements 2. This could help us back calculate the required controller 3. This could help picture the situation clearly and makes it easy to understand Answer: 2, may help calculate the controller 20/45 CL-417 Process Control Control Specification
a. Rise time, t r Recall the solution: y(t) = 1 � � � − e − ζω n t 1 − ζ 2 � 1 − ζ 2 t + tan − 1 1 − ζ 2 sin ω n � ζ y( ∞ ) = 1. At t = t r , y(t) = 1. � � � 1 − ζ 2 � 1 − ζ 2 t r + tan − 1 sin ω n = 0 ζ 21/45 CL-417 Process Control Control Specification
Expression for rise time ◮ Soln: argument = n π , n = 0, 1, . . . ◮ For n = 0, t r < 0, hence not valid. First valid solution is for n = 1. � � � 1 − ζ 2 π − tan − 1 � 1 − ζ 2 t r = /ω n ζ 22/45 CL-417 Process Control Control Specification
Approximate expression for rise time � � � 1 − ζ 2 π − tan − 1 � 1 − ζ 2 t r = /ω n ζ ◮ Want a simple expression ◮ For intermediate value of ζ = 0 . 5, t r = 2 . 42 /ω n . ◮ Small t r is obtained by large ω n ◮ ω n is the absolute value of � = − ζω n ± j ω n 1 − ζ 2 ◮ i.e. ω n is the distance of the pole from the origin 23/45 CL-417 Process Control Control Specification
Poles of second order system Recall the expression for poles: � 1 − ζ 2 − ζω n ± j ω n Im ( s ) × ω n � ω n 1 − ζ 2 θ Re ( s ) ζω n 24/45 CL-417 Process Control Control Specification
How do we get a small rise time? Im ( s ) ω n Re ( s ) Desired region where poles should lie is shaded 25/45 CL-417 Process Control Control Specification
b. Want small overshoot in step response M p y ( t ) t r t p t s 26/45 CL-417 Process Control Control Specification
Peak overshoot, M p Recall the solution: y(t) = 1 � � � − e − ζω n t 1 − ζ 2 � 1 − ζ 2 t + tan − 1 1 − ζ 2 sin ω n � ζ Differentiate and equate to zero 27/45 CL-417 Process Control Control Specification
Expression for M p π t p = � ω n 1 − ζ 2 The corresponding peak expression is: � � πζ M p = exp − � 1 − ζ 2 28/45 CL-417 Process Control Control Specification
Towards an approximate expression for M p Scilab code: zeta = 0 : 0 . 0 1 : 0 . 6 ; 1 2 Mp = exp( − %pi ∗ zeta . / s q r t (1 − zeta ˆ2) ) ; 3 L = gca ( ) ; 4 L . t h i c k n e s s = 2 ; p l o t 2 d ( zeta ,Mp) 5 x t i t l e ( ’ Plot of Mp vs . zeta ’ , ’ 6 zeta ’ , ’Mp ’ ) ; 29/45 CL-417 Process Control Control Specification
Scilab output plot Plot of Mp vs. zeta 1.0 0.9 0.8 0.7 0.6 Mp 0.5 0.4 0.3 0.2 0.1 0.0 0.0 0.1 0.2 0.3 0.4 0.5 0.6 zeta 30/45 CL-417 Process Control Control Specification
Approximate expression for M p M p ≃ 1 − ζ 0 . 6 for 0 ≤ ζ < 0 . 6 Want ζ large for small M p 31/45 CL-417 Process Control Control Specification
What is ζ ? Recall the expression for poles: � 1 − ζ 2 − ζω n ± j ω n Im ( s ) × ω n � ω n 1 − ζ 2 θ Re ( s ) ζω n 32/45 CL-417 Process Control Control Specification
Want small overshoot in step response Im ( s ) Re ( s ) Shaded region is desired 33/45 CL-417 Process Control Control Specification
c. Want small settling time M p y ( t ) t r t p t s 34/45 CL-417 Process Control Control Specification
Small settling time Recall the solution: y(t) = 1 � � − e − ζω n t � 1 − ζ 2 � 1 − ζ 2 t + tan − 1 1 − ζ 2 sin ω n � ζ e − ζω n t s = ε 4 For ε = 0 . 02, t s = ζω n For ε = 0 . 01, t s = 4 . 6 . t s small ⇒ ζω n large ζω n 35/45 CL-417 Process Control Control Specification
Poles of second order system Im ( s ) × ω n � ω n 1 − ζ 2 θ Re ( s ) ζω n 36/45 CL-417 Process Control Control Specification
Small settling time Im ( s ) Re ( s ) Desired region where poles should lie is shaded 37/45 CL-417 Process Control Control Specification
3. Desired region 38/45 CL-417 Process Control Control Specification
c. Small settling time Im ( s ) Re ( s ) Desired region where poles should lie is shaded 39/45 CL-417 Process Control Control Specification
a. Small rise time Im ( s ) ω n Re ( s ) Desired region where poles should lie is shaded 40/45 CL-417 Process Control Control Specification
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.