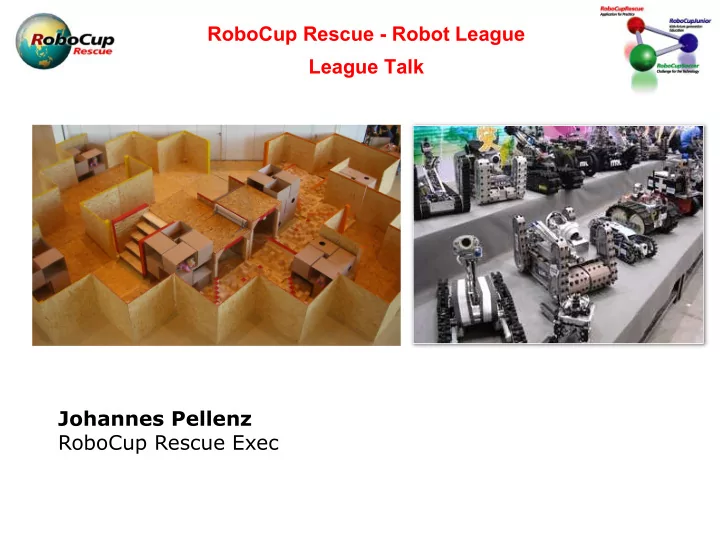
RoboCup Rescue - Robot League League Talk Johannes Pellenz RoboCup Rescue Exec
Disaster Is the building still safe? Victims?
Disaster Is the building still safe? Victims? Todays „tools �
Disaster Is the building still safe? Victims? Idea: Let the robots inspect the buildings and find victims!
Disaster Is the building still safe? Victims? Victim 3 Victim 1 Victim 2
RoboCupRescue Robot League Arena YELLOW ARENA ORANGE ARENA RED ARENA
RoboCupRescue Robot League Simulated Victim VISUAL IMAGE Signs of life: human form, motion, heat, sound, CO 2 THERMAL IMAGE
RoboCupRescue Robot League Arena Elements to Standard Test Methods NON FLAT FLOORING MAZE VIDEO AND TRACKING DISPLAYS REMOTE OPERATOR STATION
RoboCupRescue Robot League Yellow Arena
RoboCupRescue Robot League Yellow Arena Focus in the yellow arena: - Autonomous exploration and mapping - Autonomous victim detection - Teleop robots may pass it, but cannot score victims Example of a map produced by the team Hector Darmstadt, GER (Mexico City, 2012).
RoboCupRescue Robot League Orange Arena
RoboCupRescue Robot League Red Arena
RoboCupRescue Robot League Black arena: � Real disaster �
RoboCupRescue Robot League Blue Arena - Mobile Manipulation - Directed Perception DIRECTED PERCEPTION TEST METHOD DIRECTED PERCEPTION TASK ROBOCUPRESCUE TEAM: CEO MISSION II, UNIV. THAI COMMERCE, THAILAND DIRECTED PERCEPTION TASK ROBOCUPRESCUE TEAM: JACOBS UNIVERSITY, GERMANY DIRECTED PERCEPTION TEST METHOD
RoboCupRescue Robot League Blue Arena - Mobile Manipulation - Grasping Dexterity PICK AND PLACE TASK IN GRASPING DEXTERITY ROBOCUPRESCUE TEST METHOD
RoboCupRescue Robot League Air robots
Plasma-RX, Chulalongkorn University, Thailand 2008: 1st Place Award, 1st Best-In-Class Mobility
Resko, Univ of Koblenz and Landau, Germany 2008: 1st Best-in-Class Autonomy/Mapping
Resquake, K.N. Toosi Univ of Technology, Iran Innovative Operator Interfaces (steering wheel, camera mast joystick, voice commands for preset flipper positions)
Desired: Cooperating teams!
RoboCupRescue Robot League Innovative Mobility, Sensors, Manipulators, and Interfaces TEAM: RUGBOT, JACOBS UNIV, GERMANY TEAM: RUGBOT, JACOBS UNIV, GERMANY TEAM: RUGBOT, JACOBS UNIV, GERMANY
RoboCupRescue Robot League Innovative Mobility, Sensors, Manipulators, and Interfaces TEAM: INDEPENDENT, THAILAND TEAM: NIIT-BLUE, JAPAN TEAM: C-RESCUE, JAPAN TEAM: MRL, IRAN TEAM: CASUALTY, AUSTRALIA
RoboCupRescue Robot League Innovative Mobility, Sensors, Manipulators, and Interfaces TEAM: RKRS, BENILDE ST MARGARETS HIGH SCHOOL, USA UNIV. OF BREMEN, GERMANY UNIV. OF BREMEN, GERMANY
All RoboCupRescue Leagues 1 junior + 3 senior rescue leagues RoboCupRescue Junior Table size arena, lego size robots Simulation Competition Virtual Robot Competition Citywide Logistics Real Robot Competition Multiple robots, larger scenarios Advanced mobility, mapping on terrains, assistive capabilities
RoboCupRescue Robot League Sensors Tips if you want to start … 1. Read the rules: http://wiki.robocup.org/wiki/Robot_League#Rules http://wiki.ssrrsummerschool.org/doku.php?id=rrl-rules-2014
RoboCupRescue Robot League 2D Laser scanner 2. Get a laser scanner for mapping and localization, e.g. Hokuyo UTM-30LX or UTM-30LX-EW
RoboCupRescue Robot League 3D Laser scanner 3D Data drivable / not drivable 3. Use 3D perception, e.g. tilting laser scanner, Kinect, ASUS axion
RoboCupRescue Robot League 2D Laser scanner hector_slam 4. Re-use software: • ROS (Robot Operating System) • http://wiki.ros.org/robocup_rescue
RoboCupRescue Robot League Thermal sensors Thermal camera > 5000 EUR TPA81 8 Pixel Thermal Array Sensor 250 EUR 5. Use heat sensors for victim detection
RoboCupRescue Robot League Robots TAUROB Tracker Pioneer 3 AT: http://taurob.com/produkte/ugv-taurob-tracker/ http://www.mobilerobots.com/ResearchRobots/P3AT.aspx Jaguar V4 Mobile Robotic Platform Custom designs http://jaguar.drrobot.com/specification_V4.asp 5. Pick/build the right robot for what you want to do
RoboCupRescue Robot League Regional Opens China Germany Iran Japan Mexico Championships Netherlands • 2001 Seattle, USA Thailand • 2002 Fukuoka, Japan USA • 2003 Padua, Italy • 2004 Lisbon, Portugal • 2005 Osaka, Japan • 2006 Bremen, Germany • 2007 Atlanta, USA • 2008 Suzhou, China • 2009 Graz, Austria • 2010 Singapore • 2011 Istanbul, Turkey • 2012 Mexico City, Mexico • 2013 Eindhoven, Netherlands • 2014 João Pessoa, Brazil • 2015 China, Hefei • 2016 Germany, Leipzig 7. Join a competition early to meet the people and to learn from the other teams
RoboCupRescue Robot League Johannes Pellenz RoboCup Rescue Exec
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries