Large Deviation Theory for the Analysis of Power Tansmission - PowerPoint PPT Presentation
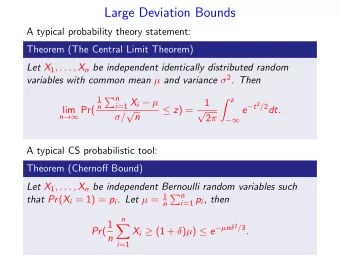
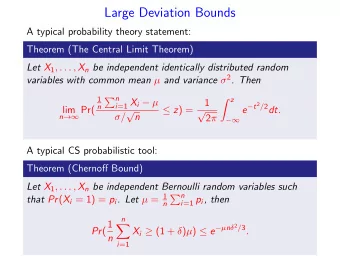
Large Deviation Theory for the Analysis of Power Tansmission Systems Subject to Stochastic Forcing June 25, 2019 Jake Roth 1 , David Barajas-Solano 2 Panos Stinis 2 , Mihai Anitescu 1 Jonathan Weare 3 , Charles Matthews 4 1 Argonne National
Large Deviation Theory for the Analysis of Power Tansmission Systems Subject to Stochastic Forcing June 25, 2019 Jake Roth 1 , David Barajas-Solano 2 Panos Stinis 2 , Mihai Anitescu 1 Jonathan Weare 3 , Charles Matthews 4 1 Argonne National Laboratory 2 Pacific Northwest National Laboratory 3 NYU Courant 4 U. Edinburgh PNNL is operated by Battelle for the U.S. Department of Energy
Quantifying the risk of cascading power transmission outages is critical ◮ Critical for safe planning and operation of the grid ◮ The growing complexity of the grid render the challenge and importance of this problem more pronounced Challenges ◮ Component outages don’t propagate locally along the grid topology ◮ Necessary to resolve the complex interactions between components ◮ Grid dynamics ◮ AC power flow ◮ Rare events: Lack of data to guide Event sequence of the WSCC July data-driven statistical models 2 & 3 1996 system disturbance [2] 1
Our goal: A generative probabilistic model for cascading failure Approach : Construct... 1. Analytic, tractable models for probabilities of individual component failures ◮ Accounting for grid dynamics and AC power flow ◮ ...and Load and generation fluctuations 2. Aggregate failure model based on individual probabilities Opportunities ◮ Stochastic dynamical systems ◮ Large deviation theory 2
Outline 1. Power transmission network model 2. Individual line failure model 3. Aggregate line failure model 3
Power transmission network model Undirected graph ( B , E ) , with E the set of transmission lines and B ≡ G (generator) ∪ L (load) ∪ S (slack/ref.) the set of nodes/buses Assumptions ◮ Swing equations to model generation synchronization ◮ Lossless AC power flow equations ◮ Frequency-dependent active load y : Operating conditions IEEE 30-bus system [3] 4
Lossless AC power flow Load model Power transmission network model DAE dynamics ˙ θ i = ω i − ω S , i ∈ G ω i = P y i − F y ˙ i ( θ, V ) − D i ( ω i − ω S ) , i ∈ G ∪ S ◮ Swing equations 5
Load model Power transmission network model DAE dynamics ˙ θ i = ω i − ω S , i ∈ G ω i = P y i − F y ˙ i ( θ, V ) − D i ( ω i − ω S ) , i ∈ G ∪ S 0 = P y i − F y i ( θ, V ) , i ∈ L 0 = Q y i − G y i ( θ, V ) , i ∈ L ◮ Swing equations ◮ Lossless AC power flow 5
Power transmission network model DAE dynamics ˙ θ i = ω i − ω S , i ∈ G ω i = P y i − F y ˙ i ( θ, V ) − D i ( ω i − ω S ) , i ∈ G ∪ S 0 = P y i − F y i ( θ, V ) , i ∈ L 0 = Q y i − G y i ( θ, V ) , i ∈ L − D L ˙ θ i = P y i − F y i ( θ, V ) , i ∈ L ◮ Swing equations ◮ Lossless AC power flow ◮ Load model 5
Power transmission network model DAE dynamics ˙ θ i = ω i − ω S , i ∈ G ω i = P y i − F y ˙ i ( θ, V ) − D i ( ω i − ω S ) , i ∈ G ∪ S 0 = P y i − F y i ( θ, V ) , i ∈ L 0 = Q y i − G y i ( θ, V ) , i ∈ L − D L ˙ θ i = P y i − F y i ( θ, V ) , i ∈ L Singularly-perturbed ODE system − M − 1 G D G M − 1 − M − 1 G T ⊤ ω G∪S ˙ 0 1 G ˙ = T 1 M − 1 − T 2 D − 1 L T ⊤ ∇H y ( x ) x = ˙ θ G∪L 0 2 G ˙ D − 1 V L 0 0 V I L x ∈ R d , with “energy” function H y ( x ) = 1 G∪S M G ω G∪S + 1 � ⊤ θ G∪L + ( Q y L B y v L + 2 v H 2 ω ⊤ P y L ) ⊤ log V L � G∪L 5
Port-Hamiltonian form The singularly-perturbed model is of Port-Hamiltonian form x = ( J − S ) ∇H y ( x ) ˙ where J is skew-symmetric, and S � 0 Stochastic model [4] To account for noise in generation and load we introduce white noise: √ t = ( J − S ) ∇H y ( x τ d x τ 2 τS 1/2 d W t t ) d t + where τ is the noise strength/“temperature”, and W t ∈ R d is a vector of d independent Weiner processes 6
Modeling line failures ◮ Line energy constraint Θ l ( x t ) < Θ max l ◮ Line fails if dynamics exit the basin of attraction around ¯ x across ∂D D ≡ { x : Θ l ( x ) < Θ max } l ◮ Goal: Estimate distribution of first exit x ¯ times T τ ∂D ≡ inf { t > 0 , x τ t ∈ ∂D } ◮ In general, � b ( x ) , n ( x ) � < 0 ∂D ( non-characteristic , n ( x ) : outward unit vector normal to ∂D ), so we can employ the large deviation theory for escapes across non-characteristic surfaces 7
lim Freidlin-Wentzell large deviation theory For the subdomain D ⊂ R d with non-characteristic surface ∂D , τ → 0 τ log E T τ ∂D = min x ∈ ∂D V (¯ x, x ) with quasipotential S ¯ x � � V (¯ x, x ) ≡ inf [0 ,T ] ( φ t ): φ t (0) = ¯ x, φ t ( T ) = x, T > 0 � T [0 ,T ] ( φ t ) = 1 �� �� σ ( φ t ) σ ( φ t ) ⊤ � + � � � S ¯ x ˙ ˙ φ t − b ( φ t ) φ t − b ( φ t ) , d t 4 0 Transverse decomposition There are smooth functions U : D ∪ ∂D → R d , l : D ∪ ∂D → R d such that ◮ b ( x ) = − σ ( x ) σ ( x ) ⊤ ∇ U ( x ) + l ( x ) ◮ �∇ U ( x ) , l ( x ) � = 0 Assuming this decomposition, we have V (¯ x, x ) = U ( x ) − U (¯ x ) 8
exp min Freidlin-Wentzell large deviation theory During the quasi-stationary phase � � U ( x ) − U (¯ x ) , we have 1 ≪ t ≪ exp τ x ∈ ∂D � d dt P [ T τ � j τ ( x ) , n ( x ) � d S ( x ) ≡ − λ τ ∂D > t ] ≈ − ∂D ◮ λ τ : (quasi-stationary) Exit rate ◮ j τ : (quasi-stationary) Probability current For div l ( x ) = 0 , � � � � det Hess U (¯ x ) − U ( x ) − U (¯ x ) � j τ ( x ) = σ ( x ) σ ( x ) ⊤ U ( x ) + l ( x ) , n ( x ) (2 πτ ) d τ (Bouchet-Reygner [1]) 9
arg min Asymptotic exit rate Our model has a transverse decomposition with U ( x ) = H y ( x ) , l ( x ) = J ∇H y ( x ) , and σ = S 1/2 ◮ For τ → 0 , the probability current is peaked around x ⋆ ≡ arg min H y ( x ) V (¯ x, x ) = x ∈ ∂D Θ l ( x )=Θ max l x ⋆ : Exit point for τ → 0 x ¯ log j τ x ⋆ ∂D x ⋆ 10
exp Asymptotic exit rate Laplace surface integral leads to � | det Hess H (¯ x ) | � −H ( x ⋆ ) − H (¯ x ) � λ τ τ → 0 ∇ ⊤ H ( x ⋆ ) S ∇H ( x ⋆ ) ∼ 2 πτB ⋆ τ with H ≡ H y , where B ⋆ is a factor accounting for the curvature of ∂D around the exit point x ⋆ : B ⋆ ≡ ∇ x H ( x ⋆ ) ⊤ L − 1 ∇ x H ( x ⋆ ) det L, L = Hess H ( x ⋆ ) − k Hess Θ l ( x ⋆ ) and k is the Lagrange multiplier of the Θ l constraint 11
arg min arg min exp Individual line failure model Energy minimizers x ⋆ ≡ H y ( x ) , H y ( x ) ¯ x ≡ Θ l ( x ) < Θ max Θ l ( x )=Θ max l l Failure rate � | det Hess H (¯ x ) | � −H ( x ⋆ ) − H (¯ x ) � λ τ τ → 0 ∇ ⊤ H ( x ⋆ ) S ∇H ( x ⋆ ) ∼ 2 πτB ⋆ τ Assumptions ◮ Non-characteristic transition surface ∂D = { x : Θ l ( x ) = Θ max } l ◮ � n ( x ) , Sn ( x ) � > 0 , so not applicable to generator-generator and slack-generator lines 12
Failure rate validation 3-bus system Escape rate vs. τ Exit time histogram Line 2 (Generator-load) 13
Failure rate validation 3-bus system Exit point histogram Line 2 (Generator-load) 14
Failure rate validation 30-bus system Escape rate vs. τ Exit time histogram Line 5 (Slack-load) 15
Failure rate validation 30-bus system Exit point histogram Line 5 (Slack-load) 16
Aggregate line failure model ◮ Event-based discretization of dynamics ◮ Simulate cascade by jumping between line failures with probability given by the individual line failure rates ◮ Line failure sequence S and its permutations σ ( S ) produce the same ¯ x and λ τ l Algorithm Kinetic Monte Carlo Require: Initialize sequence S ← { ∅ } 1: repeat Compute ¯ x for S 2: Compute x ⋆ l and λ τ l for each line l given S 3: Compute aggregate rate λ S → ˆ 4: S = � l λ S → S ∪ l Sample failure time as ∆ t ∼ Exp ( λ S → S ∪ l ) 5: Sample failed line ˆ l according to its contribution to the aggregate rate 6: 7: t ← t + ∆ t S ← ˆ S ≡ S ∪ ˆ 8: l 9: until End cascade 17
KMC model resolves power-law distribution Empirical distribution of counted total generations for cascade of 118-bus system Aggregate line failure model ◮ Split simulated cascade into “generations” (sequences of failures in 1 min timeframe) ◮ Observed power-law (Zipf) distribution of count of generations in a cascade 18
Aggregate line failure model ◮ Split simulated cascade into “generations” (sequences of failures in 1 min timeframe) ◮ Observed power-law (Zipf) distribution of count of generations in a cascade ◮ KMC model resolves power-law distribution Empirical distribution of counted total generations for cascade of 118-bus system 18
Conclusions A generative probabilistic model for quantifying risk of cascading failure ◮ Formulated a stochastic Port-Hamiltonian model of transmission network dynamics subject to stochastic forcing ◮ Individual line failure model: Large deviation theory employed to evaluate failure rates of each line ◮ Aggregate line failure model: KMC algorithm based on individual line failure rates 19
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.