Iterative methods: Limits of performance via reachable set analysis - PowerPoint PPT Presentation
Outline Introduction Reachable set analysis Applications Conclusion Iterative methods: Limits of performance via reachable set analysis Uwe Helmke and Jens Jordan University of W urzburg Harrachov 2007 Uwe Helmke and Jens Jordan
Outline Introduction Reachable set analysis Applications Conclusion Iterative methods: Limits of performance via reachable set analysis Uwe Helmke and Jens Jordan University of W¨ urzburg Harrachov 2007 Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion 1 Introduction 2 Reachable set analysis 3 Applications Richardson Iteration Inverse Iteration 4 Conclusion Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Fact: Numeric is useful for control theory (See talks of Embree, Mehrmann, Schr¨ oder, many more . . . ) Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Fact: Numeric is useful for control theory (See talks of Embree, Mehrmann, Schr¨ oder, many more . . . ) Question: Is control theory useful for numeric? Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Fact: Numeric is useful for control theory (See talks of Embree, Mehrmann, Schr¨ oder, many more . . . ) Question: Is control theory useful for numeric? Many successful approaches: Gustafsson et al. (1992), Batterson and Smillie (1990), Bhaya and Kaszkurewicz (2006), Gr¨ une and Junge (2006) Uwe Helmke and Jens Jordan Harrachov 2007
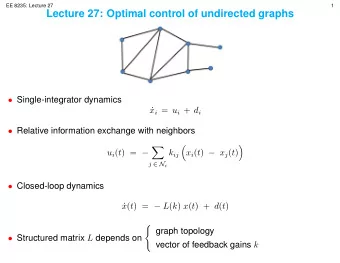
Outline Introduction Reachable set analysis Applications Conclusion Iterative methods with shifts x t +1 = f ( x t , u t ) Key Observation: Iterative method with shift = Control system Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Problems: How to find ”good” or ”optimal” u 1 , u 2 , . . . How to find feedback laws Φ, s.t. x t +1 = f ( x t , Φ( x t )) converges Limits of performance → Approach via reachable set analysis Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Problems: How to find ”good” or ”optimal” u 1 , u 2 , . . . How to find feedback laws Φ, s.t. x t +1 = f ( x t , Φ( x t )) converges Limits of performance → Approach via reachable set analysis Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Problems: How to find ”good” or ”optimal” u 1 , u 2 , . . . How to find feedback laws Φ, s.t. x t +1 = f ( x t , Φ( x t )) converges Limits of performance → Approach via reachable set analysis Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable set analysis Applications Conclusion Problems: How to find ”good” or ”optimal” u 1 , u 2 , . . . How to find feedback laws Φ, s.t. x t +1 = f ( x t , Φ( x t )) converges Limits of performance → Approach via reachable set analysis Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable sets Reachable set analysis System semigroup Applications System group Conclusion Reachable sets Given x t +1 = f ( x t , u t ), u t ∈ U , x 0 ∈ M Definition (Reachable set) R ( x 0 ) = { x ∈ M | x can be reached from x 0 in finite many steps } R ( x 0 ) = topological closure of R ( x 0 ) Observation: Let E ⊂ M set of desired states If u 1 , u 2 , . . . with x t → E exists ⇒ R ( x 0 ) ∩ E � = ∅ Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable sets Reachable set analysis System semigroup Applications System group Conclusion Reachable sets Given x t +1 = f ( x t , u t ), u t ∈ U , x 0 ∈ M Definition (Reachable set) R ( x 0 ) = { x ∈ M | x can be reached from x 0 in finite many steps } R ( x 0 ) = topological closure of R ( x 0 ) Observation: Let E ⊂ M set of desired states If u 1 , u 2 , . . . with x t → E exists ⇒ R ( x 0 ) ∩ E � = ∅ Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable sets Reachable set analysis System semigroup Applications System group Conclusion Reachable sets Given x t +1 = f ( x t , u t ), u t ∈ U , x 0 ∈ M Definition (Reachable set) R ( x 0 ) = { x ∈ M | x can be reached from x 0 in finite many steps } R ( x 0 ) = topological closure of R ( x 0 ) Observation: Let E ⊂ M set of desired states If u 1 , u 2 , . . . with x t → E exists ⇒ R ( x 0 ) ∩ E � = ∅ If R ( x 0 ) ∩ E empty ⇒ No convergent shift strategy Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable sets Reachable set analysis System semigroup Applications System group Conclusion System semigroup Definition (System semigroup) S Σ := { f u 1 ◦ · · · ◦ f u T | T ∈ N , u t ∈ U } ; f u := f ( · , u ) : M → M Facts: S Σ × M → M , ( s , x ) �→ s ( x ) is a semigroup action Reachable set = Semigroup orbit, i.e., R ( x ) = S Σ · x := { s ( x ) | s ∈ S Σ } Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable sets Reachable set analysis System semigroup Applications System group Conclusion System group Assumption: f u : M → M , x �→ f ( x , u ) is invertible Definition (System group) G Σ := � S Σ � := { g 1 ◦ · · · ◦ g T | T ∈ N , g t ∈ S Σ or g − 1 ∈ S Σ } t Facts: Often: S Σ � = G Σ R ( x ) ⊂ G Σ · x Orbits of G Σ form partition of M Often: G Σ · x has geometric structure Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Reachable sets Reachable set analysis System semigroup Applications System group Conclusion Lemma Let G Σ be an abelian Lie group. Then: Interior G Σ · x R ( x ) � = ∅ Lemma (J 2007) Assume: (i) G Σ abelian Lie group (ii) N := G Σ · x open and dense (iii) E ⊂ ∂ N. Then: (1) S Σ = G Σ implies R ( x ) ∩ E � = ∅ (2) S Σ � = G Σ implies R ( x ) ∩ E = ∅ ⇐ ⇒ R ( y ) ∩ E = ∅ for all y ∈ N Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Apply reachable set analysis on numerical iteration schemes (Following Fuhrmann and Helmke (2000), Helmke and Wirth (2001), Chu and Chu (2006), J (2007) ) Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Richardson Iteration Given A ∈ R n × n cyclic and invertible, b ∈ R n , E := { A − 1 b } Richardson Iteration x t +1 = x t + u t ( b − Ax t ); x 0 ∈ R n Facts: G RI ( A ) is an abelian Lie group N A = G RI ( A ) · x for almost all x ∈ R n . N A is open and dense; A − 1 b ∈ ∂ N A . Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Richardson Iteration Given A ∈ R n × n cyclic and invertible, b ∈ R n , E := { A − 1 b } Richardson Iteration x t +1 = x t + u t ( b − Ax t ); x 0 ∈ R n Facts: G RI ( A ) is an abelian Lie group N A = G RI ( A ) · x for almost all x ∈ R n . N A is open and dense; A − 1 b ∈ ∂ N A . Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Theorem (J 2007) interior R ( x ) � = ∅ for all x ∈ N A . If S RI ( A ) = G RI ( A ) then A − 1 b ∈ R ( x ) for all x ∈ N A . ∃ F ⊂ R n × n , s.t. S RI ( A ) � = G RI ( A ) for all A ∈ F . If A ∈ F then A − 1 b / ∈ R ( x ) for all x ∈ N A . ⇒ A ∈ F then no convergence for GMRES(1), cyclic methods, etc. Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Theorem (J 2007) interior R ( x ) � = ∅ for all x ∈ N A . If S RI ( A ) = G RI ( A ) then A − 1 b ∈ R ( x ) for all x ∈ N A . ∃ F ⊂ R n × n , s.t. S RI ( A ) � = G RI ( A ) for all A ∈ F . If A ∈ F then A − 1 b / ∈ R ( x ) for all x ∈ N A . ⇒ A ∈ F then no convergence for GMRES(1), cyclic methods, etc. Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Examples for A ∈ F : � A 1 � 0 T − 1 , T ∈ GL n ( R ) A = T ˜ 0 A with � � 0 α A 1 = , | α | > 1; − α 0 Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Inverse Iteration Given A ∈ R n × n , cyclic Inverse Iteration x t +1 = ( A − u t I ) − 1 · x t ; x 0 ∈ RP n − 1 Set of desired points: E := { eigenspaces } Facts: G II ( A ) is an abelian Lie group N A = G II ( A ) · x for almost all x ∈ RP n − 1 . N A is open and dense; E ⊂ ∂ N A Uwe Helmke and Jens Jordan Harrachov 2007
Outline Introduction Richardson Iteration Reachable set analysis Inverse Iteration Applications Conclusion Inverse Iteration Given A ∈ R n × n , cyclic Inverse Iteration x t +1 = ( A − u t I ) − 1 · x t ; x 0 ∈ RP n − 1 Set of desired points: E := { eigenspaces } Facts: G II ( A ) is an abelian Lie group N A = G II ( A ) · x for almost all x ∈ RP n − 1 . N A is open and dense; E ⊂ ∂ N A Uwe Helmke and Jens Jordan Harrachov 2007
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.