Introduction to the Locomotion of limbless modular robots Dr. Juan - PowerPoint PPT Presentation
Introduction to the Locomotion of limbless modular robots Dr. Juan Gonzalez-Gomez School of Engineering Universidad Autonoma de Madrid Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009 1 Introduction to the locomotion of snake
Introduction to the Locomotion of limbless modular robots Dr. Juan Gonzalez-Gomez School of Engineering Universidad Autonoma de Madrid Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009 1
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 2 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
The Locomotion Problem (I) ● Development of a very versatile robot with the full capability of moving on different terrains. Robot architecture Higher level ● Environment perception ● Path planning ● Navigation ● Making decision Lower level ● Coordination of the joints ● Robot morphology ● Gaits 3
Locomotion problem (II) Classic approach: ● NASA interested in this problem ● Study the terrain ● Planet exploration ● Design the mechanics ● Ex. Ambler and Dante II Robots ● Gait realization ( Dante II , Bares et al, 1994) ( Ambler , Krotkov et al, 1989) 4
Locomotion problem (III) Videos: 1,2 Bio-inspired approach: Robotic Lab at DFKI Bremen ● Copying the animals in nature Boston Dynamics ( Scorpio , Dirk et al. 2007) ( Aramies , Sastra. 2008) ( BigDog , Raibert et al. 2008) 5
Locomotion problem (IV) Modular self-reconfigurable approach: ● The robots change their morphology to adapt to the terrain Complex reconfiguration with Simple reconfiguration with Polybot G2. From wheel to a snake Polybot G1. From wheel to snake and finally to a 4-legged robot ( Polybot G1 , Yim et al. 1997) ( Polybot G2 , Yim et al. 2000) 6
Modular Robotics ● Two important aspects: ● Robot morphology ● Controller 7
Morphology (I) ● Each morphology has its own locomotion capabilities ● The number of configurations growth exponentially with the number of modules ● A classification is needed Modular Robot classification 2D Topology 3D Topology 1D Topology Snakes Robots 8
Morphology (II) 1D topology sub-classification (snakes robots) Pitch-yaw Yaw-yaw Pitch-Pitch For studying the For studying the This robots need a locomotion in 1D locomotion in 2D special skin or passive wheels to move 9
Modular robots and solid objects ● Building solids objects using modules ● Ej. RoomBot , (Arredondo et al.). Bioinspired Robotics Lab at EPFL ● Self reconfigurable Furnitures with locomotion capabilities :-) 10
Controllers ● Coordination problem : Calculation of the joint's angles to realize a gait: i t ● Classic approach : Mathematical modeling ● Calculation by inverse kinematics ● Disadvantages: The equations are only valid for an specific morphology CPG CPG CPG ● Bio-inspired controllers : CPGs ● Central Pattern Generators ● CPGs control the rhythmic activities ● Ej. The locomotion of the lamprey 11
Sinusoidal oscillators ● CPGs are replaced by a Simplified model CPG CPG CPG ● Sinusoidal oscillators: ● Advantages : in 2 i t = A i s T i O i ● Few resources required 12
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 13 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
First generation: Y1 modules ● One degree of freedom ● Easy to build ● Cheap ● Servo: Futaba 3003 ● Material: Plastic 3mm width ● Size: 52x52x72mm ● Open and “Free” 14
Building the Y1 modules 15
Electronics & control 16
Electronics ● 8-bit microcontroller ( PIC16F876A from Microchip) Servos s t r o p E n x o p i s a n n a s p i o x n E p o r t Power supply RS232 Connection to the PC 17
Cube-M module(I) Low cost mechanical design ● Simple robust modules assembling ● manually and in a quick-to-build, easy-to- handle design On-board electronics and sensors ● Electronics 18
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 19 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
One Oscillator (I) ● Sinusoidal oscillator: ● Bending angle: The bending angle is changed following this It is the angle between equation: the two parts of the module t = A sin 2 T 0 Period Initial phase Amplitude Bending angle 0 ∈[− 180,180 ] t ∈[− 90,90 ] Seconds A ∈[ 0,90 ] Degrees Degrees Degrees The initial phase determines the bending angle in the begining. 20
One Oscillator (II) Demo Example: ● A=45 degrees ● 0 = 0 21
Two oscillators (I) 1 t = A sin 2 2 t = A sin 2 T 0 T 0 Phase difference New parameter: ● Phase difference: ∈[− 180,180 ] It determines the oscillation of one module relative to the other 22
Two oscillators (II) Demo = 0 = 90 = 180 23
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 24 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
Locomotion in 1D Control scheme: Questions: Is this control scheme valid? How does the oscillators parameters affect the locomotion? How many modules are needed at least to achieve locomotion? 25
Minicube-I Demo ● Morphology 2 modules with a Pitch- pitch connection ● Controller: ● Two generators ● Parameters: A , ,T 26
Minicube-I (I) Wired model Oscillators and locomotion ● Period --> Velocity ● Amplitud --> Step ● Phase difference --> Coordination Control space ● Two dimensions: A , ● Period is a constant Typical values for locomotion: A = 40 , = 120 27
Cube Revolutions (I) Videos ● Morphology: 8 modules with pitch-pitch connection ● Controller: ● 8 equal oscillators ● Parameters: A , ,T 28
Locomotion mechanism ● Locomotion performed by the body wave propagation x ● Step: V = x ● Mean Speed: T ● Serpenoid curve ● Step calculation: l x = l s 2 k k c k −∫ 0 o s c o s ds l 29
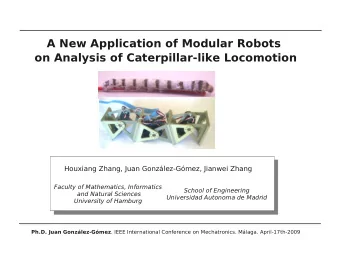
Demo 3 Modules caterpillar Most effiency when: ● A=40 degrees ● = 125 ● Application of modular robots to caterpillar-like locomotion research 30
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 31 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
Locomotion in 2D Control scheme: Questions: Is this model feasible? How many locomotion gaits can be achieved? What is the relationship between the oscillators and the gaits? How many modules are needed for achieving locomotion in 2D? 32
Minicube-II Demo ● Morphology: 3 modules with Pitch-yaw- pitch connection ● Controller: ● 3 oscillators ● Parameters: A v ,A h , v , vh ,T 33
Locomotion gaits Rolling Forward Lateral shifting A v = 40, A h = 0 A v = A h 40 vh = 90, v = 0 v = 120 A v = A h 60 Turning vh = 90, v = 0 Rotating A v = 40, A h = 0 A v = 10, A h = 40 O h = 30, v = 120 34 vh = 90, v = 180
Hypercube (I) Demo ● Morphology 8 modules with pitch-yaw connection ● Controller: ● 4 vertical oscillators ● 4 horizontal oscillators ● Parameters: A h ,A v , h , v , vh ,T 35
Locomotion gaits ● Searching : Genetic algorithms ● 5 categories of gaits ● Characterized by the 3D body wave 36
Locomotion mechanism ● 3D Body wave propagation r ● Linear Step: ● Angular Step: ● Dimensions: width (w) x length (lx) x heigth (h) 37
Summary of the robots Snakes robots Locomotion in 1D Locomotion in 2D 38
Cube-M module Video 39
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 40 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
Software Demo ● 1D topology simulator (Based on Open Dynamics Engine [ODE]) ● Generics algorithms: PGAPack ● Mathematical models in Octave/Matlab 41
Introduction to the locomotion of snake modular robots Outline 1. Introduction 2. Modules 3. Oscillators 4. Locomotion in 1D 5. Locomotion in 2D 6. Simulation 7. Conclusions and current work 42 Open Seminar. TAMS group. University of Hamburg. June, 17th, 2009
Conclusions The controller based on sinusoidal oscillators is valid for the locomotion of the 1D-topology modular robots ● Very few resources are required for its implementation ● The locomotion gaits are very smooth and natural ● At least 5 different gaits can be achieved i t = A i sin 2 T i O i 43
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.