A New Application of Modular Robots on Analysis of Caterpillar-like - PowerPoint PPT Presentation
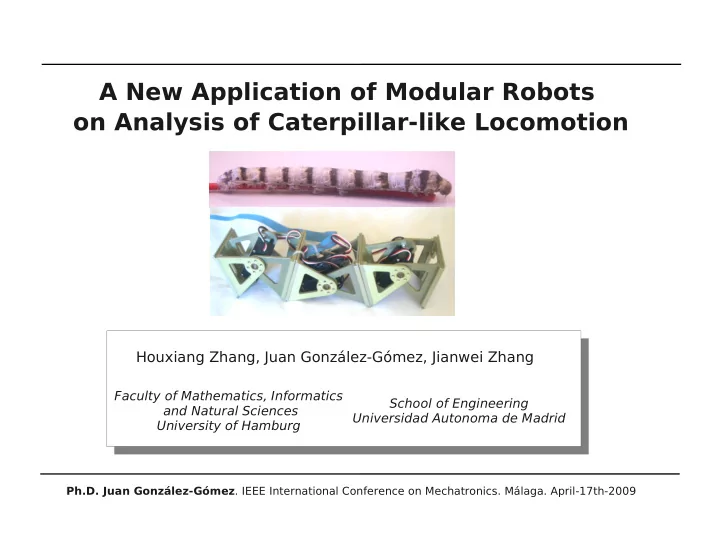
A New Application of Modular Robots on Analysis of Caterpillar-like Locomotion Houxiang Zhang, Juan Gonzlez-Gmez, Jianwei Zhang Faculty of Mathematics, Informatics School of Engineering and Natural Sciences Universidad Autonoma de Madrid
A New Application of Modular Robots on Analysis of Caterpillar-like Locomotion Houxiang Zhang, Juan González-Gómez, Jianwei Zhang Faculty of Mathematics, Informatics School of Engineering and Natural Sciences Universidad Autonoma de Madrid University of Hamburg Ph.D. Juan González-Gómez . IEEE International Conference on Mechatronics. Málaga. April-17th-2009
Outline Outline 1. Introduction 2. Kinematics 3. Locomotion 4. Experiments 5. Conclusions and future work 2 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
1.- Introduction Modular robots overview (I) ● Composed of equal modules ● Modules as building bricks ● Self-reconfigurable ● Shape adapted to the terrain SuperBot Polybot M-TRAN Modsnake Shen et al. ISI Yim et al. PARC Murata et al. AIST Wright et al. 3 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
1.- Introduction Modular robots overview (II) Applications of modular robots: ● Very few groups in Europe working on modular robotics ● Space exploration ● Urban search and rescue ● Educational purposes ● Bioinspire research Yamor Cube-M Cube Revolutions, Hypercube Moeckel et al. EPFL Zhang et al. TAMS Gonzalez-Gomez et al. UAM 4 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
2.- Kinematics Locomotion of caterpillars Inchworm Manduca sexta larvae Adhesion module Joint module 5 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
2.- Kinematics Manduca sexta larvae ● Body modeled as a chain of three Cube-M modules: Cube-M 6 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
3.- Locomotion Locomotion algorithm (I) In Nature Our model CPG CPG CPG ● Sinusoidal generators ● Central pattern generators (CPGs) ● One generator for each module ● Each CPG controls a group of ● The bending angle is controlled muscles i t = A sin 2 T t i 7 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
3.- Locomotion Locomotion algorithm (II) ● The same amplitude A for all the modules i t = A sin 2 T t i ● The same phase difference ● The same period T ● Control space of two variables: A , ● Exploration of the best working point for locomotion ● Step, Power and Ratio as a function of A , Step x = s A, Power P = P A, = P Ratio x = A , 8 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments The Cube-M modular robot Video 9 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments Experiments (I): Step 10 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments Experiments (II): Step 11 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments Experiments (III): Power 12 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments Experiments (IV): Power 13 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments Experiments (V): Ratio 14 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
4.- Experiments Experiments (VI): Ratio Working point A=40 Phase diff=125 15 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
5.- Conclusion and future work Conclusions and future work ● Investigation of caterpillar-like locomotion using our cost-efficient and robust modular robot Cube-M ● The experiments show that when the phase difference is around 125 degrees the movement is smooth, fastest and power consumption is lowest ● Further experiments and simulations ● Addition of sensors on the module to get more moving information ● Application to the design on climbing caterpillars 16 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
A New Application of Modular Robots on Analysis of Caterpillar-like Locomotion Houxiang Zhang, Juan González-Gómez, Jianwei Zhang Faculty of Mathematics, Informatics School of Engineering and Natural Sciences Universidad Autonoma de Madrid University of Hamburg Ph.D. Juan González-Gómez . IEEE International Conference on Mechatronics. Málaga. April-17th-2009
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.