Incremental Dense Reconstruction from Sparse 3D Points with an - PowerPoint PPT Presentation
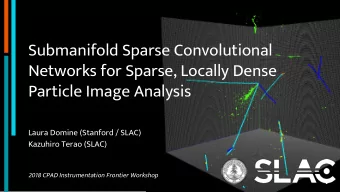
Incremental Dense Reconstruction from Sparse 3D Points with an Integrated Level-of-Detail Concept Jan Roters, Xiaoyi Jiang Department of Computer Science, University of Mnster, Germany www.avigle.de Funded by the 2nd competition of the
Incremental Dense Reconstruction from Sparse 3D Points with an Integrated Level-of-Detail Concept Jan Roters, Xiaoyi Jiang Department of Computer Science, University of Münster, Germany www.avigle.de Funded by the 2nd competition of the sponsoring competition Hightech.NRW 1
Outline Motivation Incremental dense reconstruction approach Experiments and results Future work 2
Outline Motivation Incremental dense reconstruction approach Experiments and results Future work 3
Why Incremental? Traditional dense reconstruction Resources Computation time First result -> final result Further images 4
Project AVIGLE Industrial research project Three universities and seven industry partners Development of a multifunctional aerial service platform One of the goals: creation of a virtual world with aerial photographs Swarm of Miniature Unmanned Aerial Vehicle (MUAV) Partly autonomous Creation MUAVs are still flying 5
Example Application Video 6
Outline Motivation Incremental dense reconstruction approach Experiments and results Future work 7
Traditional vs. New Approach Traditional New Approach 8
New Approach Handles wide-baseline images First results are processed quickly Reasonable incremental updates are delivered New images can be added to the computation process Integrates a level-of-detail concept by design 9
Incremental Dense Reconstruction Sparse geometry, matches and cameras known 2-view reconstruction Other views used for verification 2D triangulation of feature point of those 2 images matches Midpoints have maximum distance to the triangle points -> Increased visual entropy 10
Incremental Dense Reconstruction Midpoint of the first image is matched to the second image FREAK descriptor (Alahi et. al., 2012) Guided matching using epipolar lines Limit boundary to triangle in second image 11
Triangle Filtering 0 0 Some triangles are unlikely 500 500 to contain the correct 1000 1000 match 1500 1500 2000 2000 Classify the triangles using 2500 2500 filter rules, e.g. size 3000 3000 0 0 500 500 1000 1000 1500 1500 2000 2000 2500 2500 3000 3000 3500 3500 4000 4000 constraint 0 0 500 500 Either reject those triangles 1000 1000 or search on the whole 1500 1500 epipolar line 2000 2000 2500 2500 Level-of-detail concept by 3000 3000 bounding the triangle size 0 0 500 500 1000 1000 1500 1500 2000 2000 2500 2500 3000 3000 3500 3500 4000 4000 12
Outline Motivation Incremental dense reconstruction approach Experiments and results Future work 13
Ground Truth Dataset Evaluation with ground truth dataset The city of sights (Gruber et. al., 2010) 7 images (1920x1080) with additional depth image 14
Accuracy 6 count of projections (%) Accuracy measured as 5 reprojection error 4 Total mean accuracy 3 about 1.5 pixels 2 Total standard deviation 1 about 1.49 pixels 0 0 1 2 3 4 5 6 7 8 9 10 reprojection error in pixels 15
Time Measurement 8 2.5 computation time (sec) 7 time per image (sec) 2 6 5 1.5 4 1 3 2 0.5 1 0 0 0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10 number of iteration number of iteration all images “mean” images Decreasing computation time More triangles are rejected Images are at highest level-of-detail 16
Real World Scene 7 aerial images (4032 x 3024) Castle of Münster Sparse data obtained by VisualSFM (Changchang Wu) 17
Real World Scene Video Video here 18
Further Processing Example Mesh reconstruction sparse data iteration 1 iteration 2 iteration 6 Vierjahn et al., sGNG: Surface Reconstruction Using Growing Neural Gas, Eurographics 2013, submitted 19
Outline Motivation Incremental dense reconstruction approach Experiments and results Future work 20
Future Work Close holes in the reconstruction Especially at the borders of objects Improve triangle filters Subpixel accuracy 21
Thank you for your attention! Questions? www.avigle.de Funded by the 2nd competition of the sponsoring competition Hightech.NRW 22
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.