Imaginary multiplicative chaos and the XOR-Ising model Janne Junnila - PowerPoint PPT Presentation
Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Imaginary multiplicative chaos and the XOR-Ising model Janne Junnila (EPFL) joint work with Eero Saksman (University of Helsinki)
Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Imaginary multiplicative chaos and the XOR-Ising model Janne Junnila (EPFL) joint work with Eero Saksman (University of Helsinki) Christian Webb (Aalto University) Mathematical Physics Seminar (UNIGE), April 8th 2019
Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References A bit of history The study of multiplicative chaos traces back to the works of Høegh-Krohn and Mandelbrot in the early 70s. Mandelbrot proposed to improve Kolmogorov’s log-normal model of energy dissipation in turbulence by using random measures of the form 𝑒𝜈(𝑦) ≔ 𝑓 𝛿𝑌(𝑦)− 𝛿2 2 𝔽𝑌(𝑦) 2 𝑒𝑦, where 𝑌 is a log-correlated Gaussian field on some domain 𝑉 ⊂ ℝ 𝑒 and 𝛿 > 0 is a parameter. The model was revisited and rigorously studied by Kahane in 1985 who coined the term Gaussian multiplicative chaos (GMC). There has been a renessaince of interest in the last 10 years: connections to Liouville quantum gravity, SLE, random matrices etc.
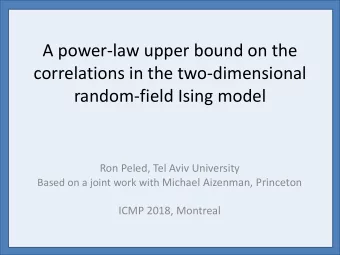
−5 "𝔽𝑌(𝑦)𝑌(𝑧)" = log 1 5 0 −10 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Log-correlated Gaussian fields A Gaussian generalized function with covariance (kernel) of the form |𝑦 − 𝑧| + (𝑦, 𝑧). We assume that is integrable, continuous and bounded from above. Figure: A simulation of 2D Gaussian Free Field [ March 1, 2018 at 18:03 – classicthesis version 0.1 ]
𝑉 𝑔(𝑦)𝑒𝜈 𝜁 (𝑦)| 𝑉 ∫ 𝑉 ≲ ‖𝑔‖ 2 𝑉 ∫ 𝑉 2 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Rigorous definition of GMC measures The GMC measure 𝜈 is typically defined by approximating the field 𝑌 with regular fields 𝑌 𝜁 and taking a limit as 𝜁 → 0 of approximating measures 𝑒𝜈 𝜁 (𝑦) ≔ 𝑓 𝛿𝑌 𝜁 (𝑦)− 𝛿2 2 𝔽𝑌 𝜁 (𝑦) 2 𝑒𝑦. Easy case: 𝑀 2 -bounded martingales If (𝑌 𝜁 ) 𝜁>0 is a martingale in 𝜁 , convergence to a non-trivial limit is easily obtained when 𝛿 ∈ (0, √𝑒) by checking that we have boundedness in 𝑀 2 (𝛻) : 𝑔(𝑦)𝑔(𝑧)𝔽𝑓 𝛿𝑌 𝜁 (𝑦)+𝛿𝑌 𝜁 (𝑧)− 𝛿2 2 𝔽𝑌 𝜁 (𝑦) 2 − 𝛿2 2 𝔽𝑌 𝜁 (𝑧) 2 𝑒𝑦 𝑒𝑧 𝔽 |∫ = ∫ |𝑦 − 𝑧| −𝛿 2 𝑒𝑦 𝑒𝑧 < ∞ ∞ ∫
{𝑦 ∈ 𝑉 ∶ lim 𝜁→0 𝑌 𝜁 (𝑦) Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Properties • Convergence holds for 𝛿 ∈ (0, √2𝑒) . • Moments: 𝔽| ∫ 𝐿 𝑒𝜈(𝑦)| 𝑞 < ∞ if and only if 𝑞 < 2𝑒 𝛿 2 . • Support: 𝜈 gives full measure to the set 𝔽𝑌 𝜁 (𝑦) 2 = 𝛿}, which has Hausdorff dimension equal to 𝑒 − 𝛿 2 2 .
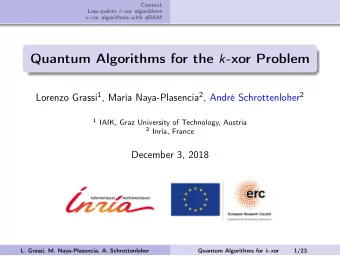
ℜ(𝛿) ℑ(𝛿) √𝑒 −√𝑒 −√2𝑒 √2𝑒 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Complex multiplicative chaos One can also define GMC distributions for complex values of 𝛿 . Figure: The subcritical regime for 𝛿 in the complex plane. We will from now on focus on the case 𝛿 = 𝑗𝛾 , with 𝛾 ∈ (0, √𝑒) .
Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Existence Let 𝜒∶ ℝ 𝑒 → ℝ be a smooth mollifier, set 𝜒 𝜁 (𝑦) = 1 𝜁 ) and define 𝜁 𝑒 𝜒( 𝑦 the approximating fields 𝑌 𝜁 = 𝑌 ∗ 𝜒 𝜁 . As we are inside the 𝑀 2 -phase, one can show that the functions 𝜈 𝜁 ≔ 𝑓 𝑗𝛾𝑌 𝜁 (𝑦)+ 𝛾2 2 𝔽𝑌 𝜁 (𝑦) 2 form a Cauchy sequence in 𝑀 2 (𝛻) as elements of 𝐼 𝑡 (ℝ 𝑒 ) for 𝑡 < −𝑒/2 and consequently obtain convergence in probability to a random distribution 𝜈 ∈ 𝐼 𝑡 (ℝ 𝑒 ) . Similar 𝑀 2 -computations also show that the limit does not depend on the choice of 𝜒 . More generally one can prove uniqueness and convergence for a wider class of so called standard approximations .
𝛾2 𝑉 2𝑂 . 1 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Moments All (mixed) moments of 𝜈(𝑔) are finite and 𝔽|𝜈(𝑔)| 2𝑂 ≤ ‖𝑔‖ 2𝑂 𝑒 𝑂 . ∞ 𝐷 𝑂 𝑂 In particular, the moments determine the distribution of 𝜈(𝑔) . The case of pure logarithm covariance If 𝔽𝑌(𝑦)𝑌(𝑧) = log |𝑦−𝑧| , a straightforward computations yields ∏ 1≤𝑗<𝑘≤𝑂 |𝑦 𝑗 − 𝑦 𝑘 | 𝛾 2 ∏ 1≤𝑗<𝑘≤𝑂 |𝑧 𝑘 − 𝑧 𝑘 | 𝛾 2 𝔽|𝜈(1)| 2𝑂 = ∫ ∏ 1≤𝑗,𝑘≤𝑂 |𝑦 𝑗 − 𝑧 𝑘 | 𝛾 2 Estimating this was done by Gunson and Panta in 1977 in two dimensions, but for other dimensions and more general covariances some extra work is needed.
log 1≤𝑗<𝑘≤𝑂 1 log 1≤𝑗,𝑘≤𝑂 ∑ 1 log 1≤𝑗<𝑘≤𝑂 ∑ 1 − ∑ Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Moments for general covariances In general the formula for 2𝑂 th moment is 𝑉 2𝑂 𝑓 −𝛾 2 ∑ 1≤𝑗<𝑘≤𝑂 𝐷(𝑦 𝑗 ,𝑦 𝑘 )−𝛾 2 ∑ 1≤𝑗<𝑘≤𝑂 𝐷(𝑧 𝑗 ,𝑧 𝑘 )+𝛾 2 ∑ 1≤𝑗,𝑘≤𝑂 𝐷(𝑦 𝑗 ,𝑧 𝑘 ) . 𝔽|𝜈(1)| 2𝑂 = ∫ Naive approach If one simply assumes that the -term in the covariance of 𝑌 is bounded, then one could bound the exponent by ( 𝛾 2 times) |𝑦 𝑗 − 𝑦 𝑘 | − |𝑧 𝑗 − 𝑧 𝑘 | + |𝑦 𝑗 − 𝑧 𝑘 | +𝐷𝑂 2 for some constant 𝐷 > 0 and in this way reduce to the pure-logarithm case.
log 2 1 1 𝑗=1 ∑ 2𝑂 − ∑ 1≤𝑗<𝑘≤2𝑂 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Onsager inequalities Onsager inequalities provide a better bound for the exponent. If we let 𝑟 1 , … , 𝑟 2𝑂 ∈ {−1, 1} , then we have 𝑟 𝑗 𝑟 𝑘 𝐷(𝑦 𝑗 , 𝑦 𝑘 ) ≤ 1 + 𝐷𝑂. 2 min 𝑘≠𝑗 |𝑦 𝑗 − 𝑦 𝑘 | The integral of the exponential of the RHS can then be estimated using a combinatorial argument already appearing in the Gunson and Panta paper. We have a couple of versions of this inequality, depending on what regularity one assumes from . Either • 𝑒 = 2 and ∈ 𝐷 2 (𝑉 × 𝑉) (get Onsager on any compact subset 𝐿 ⊂ 𝑉 ); or • 𝑒 ≥ 1 arbitrary ∈ 𝐼 𝑒+𝜁 𝑚𝑝𝑑 (𝑉 × 𝑉) for some 𝜁 > 0 (get Onsager locally on small enough balls); or • 𝑒 = 2 and 𝑌 is the GFF (get Onsager globally in 𝑉 )
𝑙=0 ‖𝑔‖ 𝐶 𝑡 𝑙=0 ‖ ℓ 𝑟 (ℕ) , 2,2 (ℝ 𝑒 ) = 𝐼 𝑡 (ℝ 𝑒 ) ̂ Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Interlude: Besov spaces Besov spaces 𝐶 𝑡 𝑞,𝑟 (ℝ 𝑒 ) are Banach spaces of (generalized) functions in ℝ 𝑒 parametrised by three parameters 𝑡 ∈ ℝ , 1 ≤ 𝑞, 𝑟 ≤ ∞ . The Besov-norm is defined by 𝑞,𝑟 (ℝ 𝑒 ) ≔ ‖(2 𝑙𝑡 ‖𝜚 𝑙 ∗ 𝑔‖ 𝑀 𝑞 (ℝ 𝑒 ) ) ∞ where 𝜚 𝑙 ∈ S (ℝ 𝑒 ) , 𝜚 𝑙 (𝑦) ≔ 2 (𝑙−1)𝑒 𝜚 1 (2 𝑙−1 𝑦) for 𝑙 ≥ 2 , 𝜚 0 ⊂ 𝐶(0, 2) , supp ̂ 𝜚 1 ⊂ 𝐶(0, 4) ⧵ 𝐶(0, 1) and ∑ ∞ 𝜚 𝑙 (𝜊) ≡ 1 . supp ̂ The Besov spaces include many common function spaces, and in particular • 𝐶 𝑡 ∞,∞ (ℝ 𝑒 ) = 𝐷 𝑡 (ℝ 𝑒 ) (at least for 𝑡 ∈ (0, 1) ) • 𝐶 𝑡
2𝑒 𝛾2 √𝑒 − 𝛾 2 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Regularity of imaginary chaos • 𝜈 is almost surely not a complex measure (it has infinite total variation). • As a random distribution we have 𝜈 ∈ 𝐶 𝑡 𝑞,𝑟,𝑚𝑝𝑑 (𝑉) a.s. when 2 and 𝜈 ∉ 𝐶 𝑡 𝑞,𝑟,𝑚𝑝𝑑 (𝑉) when 𝑡 > − 𝛾 2 2 . 𝑡 < − 𝛾 2 𝛾2 as 𝜇 → ∞ . • log ℙ[|𝜈(𝑔)| > 𝜇) behaves approximately like 𝜇 • As 𝛾 → √𝑒 , we converge in law to a weighted complex white noise: 2 (𝑦,𝑦) 𝑋(𝑒𝑦) |𝑇 𝑒−1 | 𝜈 𝛾 (𝑦) → 𝑓
𝑙 )) 2 𝔽|𝜈(𝑔 𝑙 )| 2 𝑙 )| ≥ 𝜄𝔽|𝜈(𝑔 ℙ[|𝜈(𝑔 𝐶 𝑡 𝔽|𝜈(𝑔 𝑙 )) 2 𝜔 ∈ 𝐷 ∞ |𝜈(𝑔 Introduction to Gaussian multiplicative chaos Imaginary multiplicative chaos XOR-Ising model References Proof ideas To show that 𝜈 is a.s. not a complex measure it is enough to show that there a.s. exists a sequence 𝑔 𝑙 ∈ 𝐷 𝑑 (𝑉) with ‖𝑔 𝑙 ‖ ∞ ≤ 1 and 𝑙 )| → ∞ . A suitable sequence is given by 𝜔(𝑦)𝑓 −𝑗𝛾𝑌 𝜁𝑙 (𝑦) , where 𝑑 (𝑉) . We show that (𝔽𝜈(𝑔 𝑙 )| 2 → 1 and use the Paley–Zygmund inequality 𝑙 )|] ≥ (1 − 𝜄) 2 (𝔽𝜈(𝑔 with 𝜄 = (𝔽|𝜈(𝑔 𝑙 )|) −𝜁 . To show that 𝜈 ∈ 𝐶 𝑡 𝑞,𝑟,𝑚𝑝𝑑 (𝑉) , 𝑡 < − 𝛾 2 2 , it is enough to focus on the case 𝑞 = 𝑟 = 2𝑂 and show that 𝔽‖𝜔𝜈‖ 2𝑂 2𝑂,2𝑂 (ℝ 𝑒 ) < ∞ .
Recommend

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.