I ntroduction / Standard digital control loop Actuator Physical - PowerPoint PPT Presentation
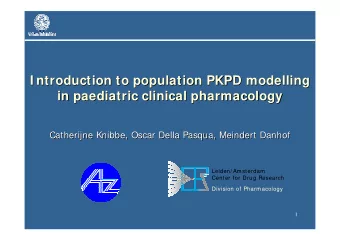
I ntroduction / Standard digital control loop Actuator Physical System Sensor Resource-aware control Maurice Heemels Controller ! All control tasks executed periodically and triggered by time th oCPS PhD School on CPS,
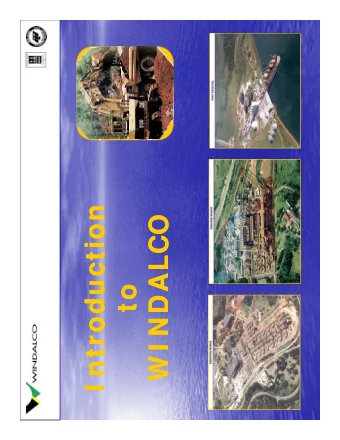
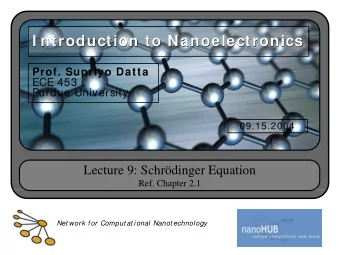
I ntroduction � / �� Standard digital control loop Actuator Physical System Sensor Resource-aware control Maurice Heemels Controller � ! All control tasks executed periodically and triggered by time � th oCPS PhD School on CPS, June ���� Where innovation starts I ntroduction I ntroduction � / �� � / �� Resource-aware control Resource-aware control • Resource-constrained control systems • Resource-constrained control systems – Computation time on embedded systems – Computation time on embedded systems – Network utilization in NCS – Network utilization in NCS – Battery power in WCS – Battery power in WCS • Time-triggered periodic control: I ne � cient usage of resources • Time-triggered periodic control: I ne � cient usage of resources “ Wise men speak because they have something to say, fools because they have to say something. ” – Plato
I ntroduction I ntroduction � / �� � / �� Resource-aware control Resource-aware control • Paradigm shift: Periodic control � ! Aperiodic control • Paradigm shift: Periodic control � ! Aperiodic control • Only act when needed: bringing feedback in resource utilization • Only act when needed: bringing feedback in resource utilization Actuator Physical System Actuator Physical System Actuator Physical System Actuator Physical System Sensor Sensor Sensor Sensor Controller Controller Controller Controller � ! � ! “ Wise men speak because they have something to say, fools because they have to say something. ” – Plato I ntroduction I ntroduction � / �� � / �� Paradigm shift: Periodic control � ! Aperiodic control Paradigm shift: Periodic control � ! Aperiodic control • Event-triggered control: • Event-triggered control: Actuator Physical System Sensor Actuator Physical System Sensor u ( t ) = K ( x ( t k )) , when t 2 [ t k , t k +1 ) u ( t ) = K ( x ( t k )) , when t 2 [ t k , t k +1 ) t k +1 = inf { t > t k | C ( x ( t ) , x ( t k )) > 0 } t k +1 = inf { t > t k | C ( x ( t ) , x ( t k )) > 0 } Controller Controller • Example event-triggering condition C ( x ( t ) , x ( t k )) > 0 , k x ( t ) � x ( t k ) k > � |{z} x ( t ) ˆ [ � ] Arzen, I FAC WC ’ �� [ � ] Astrom & Bernhardsson, I FAC WC ’ �� [ � ] Heemels et al , CEP ’ ��
I ntroduction Outline � / �� � / �� Paradigm shift: Periodic control � ! Aperiodic control • Basic setup state-feedback ETC: k x ( t ) � x ( t k ) k > � k x ( t ) k • Hybrid systems • Challenges • Event-triggered control: reactive – Performance/Robustness w.r.t. disturbances & Zeno-freeness – Output-based (& Decentralized) u ( t ) = K ( x ( t k )) , when t 2 [ t k , t k +1 ) • Alternative event-triggered controllers – Relative, absolute and mixed event generators t k +1 = inf { t > t k | C ( x ( t ) , x ( t k )) > 0 } – Periodic event-triggered control – Time regularisation – Dynamic event generators • Self-triggered control: proactive • Application to vehicle platooning • Conclusions & What ’ s next? u ( t ) = K ( x ( t k )) , when t 2 [ t k , t k +1 ) (Dessert?) t k +1 = t k + M ( x ( t k )) Basic ETC setup Basic ETC setup � / �� � / �� • Linear system • Linear system Actuator Physical System Actuator Physical System Sensor Sensor x ( t ) = Ax ( t ) + Bu ( t ) ˙ x ( t ) = Ax ( t ) + Bu ( t ) ˙ • Linear state feedback • Linear state feedback Controller Controller u ( t ) = Kx ( t ) , t 2 R > 0 u ( t ) = Kx ( t ) , t 2 R > 0 • I deal loop: ˙ x ( t ) = ( A + BK ) x ( t ) A + BK Hurwitz
Basic ETC setup Basic ETC setup � / �� � / �� • Linear system • Linear system Actuator Physical System Sensor Actuator Physical System Sensor x ( t ) = Ax ( t ) + Bu ( t ) ˙ x ( t ) = Ax ( t ) + Bu ( t ) ˙ • Linear state feedback • Linear state feedback Controller Controller u ( t ) = Kx ( t ) , t 2 R > 0 u ( t ) = Kx ( t ) , t 2 R > 0 • I deal loop: ˙ x ( t ) = ( A + BK ) x ( t ) • I deal loop: ˙ x ( t ) = ( A + BK ) x ( t ) • Sampled-data control with execution times t k , k 2 N (ZOH) • Sampled-data control with execution times t k , k 2 N (ZOH) u ( t ) = K ˆ x ( t ) = Kx ( t k ) , t 2 [ t k , t k +1 ) u ( t ) = K ˆ x ( t ) = Kx ( t k ) , t 2 [ t k , t k +1 ) • Perturbation perspective: implementation-induced error e ( t ) = x ( t k ) � x ( t ) for t 2 [ t k , t k +1 ) x ( t ) = Ax ( t ) + BKx ( t k ) = ( A + BK ) x ( t ) + BKe ( t ) ˙ [ � ] Tabuada, Event-triggered real-time scheduling of stabilizing control tasks , TAC ���� [ � ] Tabuada, Event-triggered real-time scheduling of stabilizing control tasks , TAC ���� Basic ETC setup Basic ETC setup � / �� � / �� • Perturbation perspective: • Perturbation perspective: x ( t ) = Ax ( t ) + BKx ( t k ) = ( A + BK ) x ( t ) + BKe ( t ) ˙ x ( t ) = Ax ( t ) + BKx ( t k ) = ( A + BK ) x ( t ) + BKe ( t ) ˙ • Since A + BK Hurwitz, quadratic Lyapunov function V ( x ) = x > Px s.t. • Since A + BK Hurwitz, quadratic Lyapunov function V ( x ) = x > Px s.t. d d dtV 6 � a 2 k x ( t ) k 2 + k e ( t ) k 2 dtV 6 � a 2 k x ( t ) k 2 + k e ( t ) k 2 • Crux: Guarantee k e ( t ) k 6 ⇢ a · k x ( t ) k with 0 < ⇢ < 1 s.t. d dtV 6 � a 2 k x ( t ) k 2 + k e ( t ) k 2 6 � (1 � ⇢ 2 ) a 2 k x ( t ) k 2 • Guarantee for Global Exponential Stability t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > ⇢ a · k x ( t ) k } | {z } = e ( t )
Event-triggered control Event-triggered control �� / �� �� / �� • Summary of event-triggered setup: • Summary of event-triggered setup: – Linear system – Linear system x ( t ) = Ax ( t ) + Bu ( t ) ˙ x ( t ) = Ax ( t ) + Bu ( t ) ˙ – Execution times t k , k 2 N – Execution times t k , k 2 N t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > ⇢ a · k x ( t ) k } t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > ⇢ a · k x ( t ) k } – Control law: – Control law: u ( t ) = Kx ( t k ) , t 2 [ t k , t k +1 ) u ( t ) = Kx ( t k ) , t 2 [ t k , t k +1 ) • Global exponential stability (GES) • Global exponential stability (GES) • Question: Which important issue should we still verify? Basic ETC setup Basic ETC setup �� / �� �� / �� • Linear system • Linear system Actuator Physical System Actuator Physical System Sensor Sensor x ( t ) = Ax ( t ) + Bu ( t ) ˙ x ( t ) = Ax ( t ) + Bu ( t ) ˙ • Linear state feedback (ZOH) • Linear state feedback (ZOH) Controller Controller u ( t ) = Kx ( t k ) , t 2 [ t k , t k +1 ) u ( t ) = Kx ( t k ) , t 2 [ t k , t k +1 ) • Execution times: t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > � k x ( t ) k } • Execution times: t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > � k x ( t ) k } | {z } | {z } = e ( t ) • Properties established in [ � ]: = e ( t ) – Global exponential stability (GES) when � su � . small • Properties established in [ � ]: – Global exponential stability (GES) when � su � . small – Global positive lower bound on minimal inter-event time (M I ET) inf { t k +1 � t k | k 2 N } > ⌧ min > 0 – Zeno-free: Global positive lower bound on minimal inter-event time (M I ET) inf { t k +1 � t k | k 2 N } > ⌧ min > 0 • I mproved designs for GES/ L 1 -gain via hybrid system analysis [ � ] [ � ] Tabuada, Event-triggered real-time scheduling of stabilizing control tasks , TAC ���� [ � ] Donkers, Heemels, Output-Based Event-Triggered Control with Guaranteed L ∞ -gain ... , TAC ���� [ � ] Tabuada, Event-triggered real-time scheduling of stabilizing control tasks , TAC ����
Hybrid systems (side trip) Hybrid systems (side trip) �� / �� �� / �� • Perturbation perspective: • Perturbation perspective: x ( t ) = Ax ( t ) + BKx ( t k ) = ( A + BK ) x ( t ) + BKe ( t ) ˙ x ( t ) = Ax ( t ) + BKx ( t k ) = ( A + BK ) x ( t ) + BKe ( t ) ˙ • Execution times t k , k 2 N • Execution times t k , k 2 N t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > � k x ( t ) k } t k +1 = inf { t > t k | k x ( t k ) � x ( t ) k > � k x ( t ) k } | {z } | {z } = e ( t ) = e ( t ) • Hybrid system perspective [ � , � ] based on jump- � ow models [ � ]: ( A + BK ) x + BKe x � � d when k e k 2 6 � 2 k x k 2 = , e � ( A + BK ) x � BKe d t x + � x � when k e k 2 > � 2 k x k 2 = , e + 0 [ � ] Donkers, Heemels, Output-Based Event-Triggered Control ... , TAC ���� & CDC ���� [ � ] Postoyan, Anta, Nesic, Tabuada, A unifying Lyapunov-based framework ... , CDC-ECC ���� [ � ] Goebel, Sanfelice, Teel, Hybrid Dynamical Systems , Princeton, ���� . ETC based on feedback ETC based on feedback �� / �� �� / �� Hybrid system perspective (side trip) Hybrid system perspective (side trip) ( A + BK ) x + BKe x � � d ˙ ⇠ = Φ ⇠ when ⇠ > Q ⇠ 6 0 when k e k 2 6 � 2 k x k 2 = e � ( A + BK ) x � BKe ⇠ + = J ⇠ d t when ⇠ > Q ⇠ > 0 x + � x � when k e k 2 > � 2 k x k 2 = e + 0 ( x � ˙ ⇠ = Φ ⇠ , when ⇠ > Q ⇠ 6 0 or compactly with ⇠ = ⇠ + = J ⇠ , when ⇠ > Q ⇠ > 0 e [ � ] Donkers, Heemels, Output-based event-triggered control with guaranteed L ∞ -gain , TAC ���� & CDC ���� [ � ] Goebel, Sanfelice, Teel, Hybrid Dynamical Systems: Modeling, Stability and Robustness , Princeton, ���� .
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.