Homogeneous transforms Rotation matrices assume that the origins of - PowerPoint PPT Presentation
Homogeneous transforms Rotation matrices assume that the origins of the two frames are co-located. What if theyre separated by a translation? B y A y p B d A A x B x Homogeneous transform B y A y (same point, two
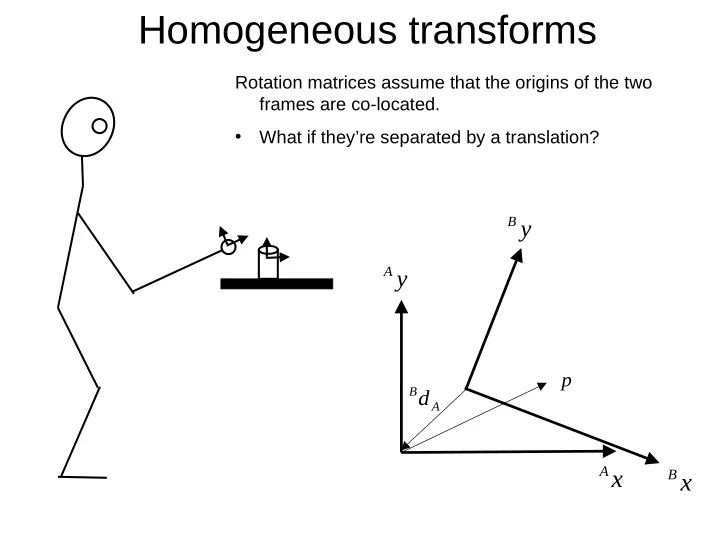
Homogeneous transforms Rotation matrices assume that the origins of the two frames are co-located. • What if they’re separated by a translation? B y A y p B d A A x B x
Homogeneous transform B ˆ y A ˆ y (same point, two reference frames) B p A d B A p A ˆ B ˆ x x A A B A = + p R p d B B
Homogeneous transform B y A A B A = + p R p d A y B B A A B R d p p = B B a d b 0 1 1 A x B A x r r r d 11 12 13 x A B B r r r d p p A = 21 22 23 y = T B A r r r d 1 1 31 32 33 z 0 0 0 1 always one always zeros
Example 1: homogeneous transforms B x B y B z l A y θ A x A z B T What’s ? A
Example 1: homogeneous transforms A y B T What’s ? B B y x A θ θ − θ cos( ) sin( ) 0 A x A , A R = θ θ sin( ) cos( ) 0 z B z B 0 0 1 − l B B R d B = A A T B B = x d A 0 B A y 0 1 0 B z l θ θ − cos( ) sin( ) 0 l − θ θ sin( ) cos( ) 0 0 A y B = T A 0 0 1 0 θ 0 0 0 1 A x A z
Example 2: homogeneous transforms y x z ( ) b θ − θ θ + c 0 s l 2 c π b b 4 ( ) θ θ θ + s 0 c l 2 s π a = T b 4 l − 0 1 0 0 0 0 0 1 l y z This arm rotates about the axis. a a θ x a z a a T What’s ? b
Example 3: homogeneous transforms A ˆ y c ˆ c ˆ y x l c ˆ z φ θ A ˆ x A ˆ z − − c 0 s c s 0 c c s c s θ θ φ φ θ φ φ θ θ a = a b = = R R R 0 1 0 s c 0 s c 0 φ φ φ φ c b c − − s 0 c 0 0 1 s c s s c θ θ θ φ θ φ θ
Example 3: homogeneous transforms A ˆ y c ˆ c ˆ y x l c ˆ z φ θ A ˆ x A ˆ z − l − − c c s c s l lc c θ φ φ θ θ θ φ c = d 0 a a c =− = − = d R d s c 0 0 ls c φ φ φ 0 − − s c s s c 0 ls c θ φ θ φ θ θ φ − c c s c s lc c θ φ φ θ θ θ φ a a s c 0 ls R d φ φ φ a c = = T c − − s c s s c ls c 0 1 θ φ θ φ θ θ φ 0 0 0 1
Inverse of the Homogeneous transform Can also derive it from the forward Homogeneous transform: B = B A + B p R p d A A ( ) T A B B B = − p R p d A A B p − 1 A B = p T A 1 T T B B B − R R d − 1 B = where A A A T A 0 1
Inverse of the Homogeneous transform B ˆ y A ˆ y (same point, two reference frames) B p A d B A p A ˆ B ˆ x x ( ) B B A B A B A A = − = − p R p R d R p d A A B A B
Example 1: homogeneous transform inverse B x B y B z l θ θ − cos( ) sin( ) 0 l − θ θ sin( ) cos( ) 0 0 B = T A A y 0 0 1 0 0 0 0 1 θ A x A T What’s ? B A z
Example 1: homogeneous transform inverse θ − θ cos( ) sin( ) 0 T T B B B − R R d − 1 B = T A A A A R = θ θ sin( ) cos( ) 0 B A 0 1 0 0 1 − θ − θ − θ l cos( ) sin( ) 0 l l cos( ) B A B = − = θ θ = θ d A 0 R d sin( ) cos( ) 0 0 l sin( ) B A 0 0 0 1 0 0 θ − θ θ cos( ) sin( ) 0 l cos( ) θ θ θ sin( ) cos( ) 0 l sin( ) − 1 B A = = T T A B 0 0 1 0 0 0 0 1
Example 2: homogeneous transform inverse y x z ( ) b θ − θ θ + c 0 s l 2 c π b b 4 ( ) θ θ θ + s 0 c l 2 s π a = T b 4 l − 0 1 0 0 0 0 0 1 b T What’s ? a l y ( ) a θ θ − + c s 0 l 2 c c s s θ θ π π θ θ + θ + 4 4 − 0 0 1 0 x b = ( ) T a a − θ θ − s c 0 l 2 s c c s z θ π θ π θ + θ + 4 4 a 0 0 0 1
Forward Kinematics • Where is the end effector w.r.t. the “base” frame?
Composition of homogeneous transforms 3 x Base to eff transform 3 y l 3 l 0 0 1 2 T = T T T q 2 3 2 3 1 2 3 x 1 x 1 y q 2 Transform associated w/ link 3 2 y 0 y Transform associated w/ link 2 q 1 0 x l Transform associated w/ link 1 1 0 z
Forward kinematics: composition of homogeneous transforms 3 x 0 0 1 2 T = T T T 3 1 2 3 − c s 0 l c 3 y 1 1 1 1 s c 0 l s l 1 1 1 1 0 = T 3 1 0 0 1 0 l q 2 3 2 x 1 x 0 0 0 1 1 y q − c s 0 l c 2 2 2 2 2 s c 0 l s 2 2 2 2 1 = T 2 y 0 2 y 0 0 1 0 0 0 0 1 q 1 0 x l 1 0 z
Forward kinematics: composition of homogeneous transforms 3 x 0 0 1 2 T = T T T 3 1 2 3 3 y − c s 0 l c 3 3 3 3 l s c 0 l s 3 3 3 3 3 2 = T l q 3 0 0 1 0 2 3 2 x 1 x 1 0 0 0 1 y q 2 2 y 0 y q 1 0 x l 1 0 z
Remember those double-angle formulas… ( ) ( ) ( ) ( ) ( ) θ ± φ = θ φ ± θ φ sin sin cos cos sin ( ) ( ) ( ) ( ) ( ) θ ± φ = θ φ θ φ cos cos cos sin sin
Forward kinematics: composition of homogeneous transforms 0 0 1 2 T = T T T 3 1 2 3 − − − c s 0 l c c s 0 l c c s 0 l c 1 1 1 1 2 2 2 2 3 3 3 3 s c 0 l s s c 0 l s s c 0 l s 1 1 1 1 2 2 2 2 3 3 3 3 0 = T 3 0 0 1 0 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 0 1 − + + c s 0 l c l c l c 123 123 1 1 2 12 3 123 + + s c 0 l s l s l s 123 123 1 1 2 12 3 123 0 = T 3 0 0 1 0 0 0 0 1
DH parameters • There are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • We will sacrifice some of this flexibility for a more systematic approach: DH (Denavit-Hartenberg) parameters. • DH parameters is a standard for describing a series of transforms for arbitrary mechanisms. 3 3 x z 3 x 3 y l l 3 3 2 x l q 2 l 3 2 q x 1 x 2 3 1 1 y z 2 z q 2 q 2 1 2 x y 0 y 0 y q 1 q 0 x 1 l 0 1 z l 0 1 z 0 x
Forward kinematics: DH parameters These four DH parameters, ( ) α θ a d i i i i represent the following homogeneous matrix: − c s 0 0 1 0 0 0 1 0 0 a 1 0 0 0 θ θ i i i − s c 0 0 0 1 0 0 0 1 0 0 0 c s 0 θ θ α α = T i i i i 0 0 1 0 0 0 1 d 0 0 1 0 0 s c 0 α α i i i 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 a d Then, translate by along x axis First, translate by along z axis i i α θ and rotate by about x axis and rotate by about z axis i i
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.