High order parametric polynomial approximation of conic sections Ga - PowerPoint PPT Presentation
High order parametric polynomial approximation of conic sections Ga sper Jakli c (joint work with J. Kozak, M. Krajnc, V. Vitrih and E. Zagar) FMF and IMFM, University of Ljubljana PINT, University of Primorska DWCAA09, Alba di
High order parametric polynomial approximation of conic sections Gaˇ sper Jakliˇ c (joint work with J. Kozak, M. Krajnc, V. Vitrih and E. ˇ Zagar) FMF and IMFM, University of Ljubljana PINT, University of Primorska DWCAA09, Alba di Canazei September 9th 2009 1 / 28
Outline 1 Parametric approximation of implicit curves 2 Conic sections 3 Best solution 4 Examples 5 H¨ ollig-Koch conjecture 6 Sphere approximation 2 / 28
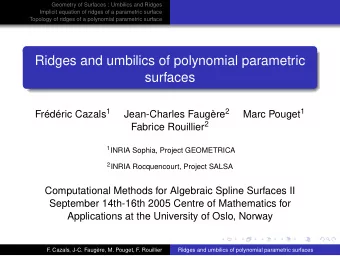
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle (blue dashed), quintic polynomial approximation given by Lyche and Mørken in 1995 (brown) and the new quintic approximant (red). 3 / 28
Parametric approximation • Let ( x , y ) ∈ D ⊂ R 2 , f ( x , y ) = 0 , be a segment of a regular smooth planar curve f f f f f f f f f . • Suppose � x r ( t ) � r : I ⊂ R → R 2 : t �→ r r r r r r r r y r ( t ) is a parametric approximation of the curve segment f f and f f f f f f f f ( x r ( t ) , y r ( t )) = ε ( t ) , t ∈ [ a , b ] . 4 / 28
• Consider the regular parameterization of r r r r r r r r r with respect to the normal of f f , i.e., every point ( x , y ) on a curve f f f f f f f f defines a unique parameter t := t ( x , y ) on a curve r r r : r r r r r r f ( x , y ) r r r r r r r r r r ( t ) r r r r r r r r • This provides an upper bound on Hausdorff and parametric distance. 5 / 28
Theorem If the curve r r r r r r r r r can be regularly reparameterized by the normal to f , and ε is small enough, the distance between curves is bounded by | ε ( t ( x , y )) | + O ( ε ( t ( x , y )) 2 ) . max � ( x , y ) ∈D f 2 x ( x , y ) + f 2 y ( x , y ) 6 / 28
Conic sections • Only ellipse and hyperbola are interesting to consider (no polynomial parameterization). • A particular conic section is given as f ( x , y ) := x 2 ± y 2 − 1 = 0 . • The main problem: find two nonconstant polynomials x n and y n of degree at most n , such that x 2 n ( t ) ± y 2 n ( t ) = 1 + ε ( t ) , where ε is a polynomial of degree at most 2 n . 7 / 28
• Assume that at least one point is interpolated, i.e., ε (0) = 0. In order to get ε as small as possible, it is natural to choose ε ( t ) := t 2 n . • If also a tangent direction is prescribed at the interpolation point, we have ( x ′ n (0) , y ′ ( x n (0) , y n (0)) = (1 , 0) , n (0)) = (0 , 1) . • Thus n � a ℓ t ℓ , x n ( t ) = 1 + ℓ =1 n � b ℓ t ℓ , y n ( t ) = t + ℓ =2 and 8 / 28
• x 2 n ( t ) ± y 2 a 2 n ± b 2 t 2 n . � � n ( t ) = 1 + n � • A reparameterization t �→ | a 2 n ± b 2 2 n n | t gives n n � � α ℓ t ℓ , β ℓ t ℓ , x n ( t ) := 1 + y n ( t ) := β 1 > 0 , ℓ =1 ℓ =1 where x 2 n ( t ) ± y 2 n ( t ) = 1 + sign ( a 2 n ± b 2 n ) t 2 n . Many acceptable solutions exist. 9 / 28
Table: The number of appropriate solutions in all three cases for n = 1 , 2 , . . . , 10. 1 2 3 4 5 6 7 8 9 10 n elliptic 1 1 3 6 15 27 63 120 246 495 hyp. a 2 n < b 2 1 0 1 2 5 8 19 32 68 120 n hyp. a 2 n > b 2 0 1 0 2 0 9 0 32 0 125 n 10 / 28
Solutions • Solving the equation x 2 n ( t ) ± y 2 n ( t ) = 1 ± t 2 n is equivalent to solving x 2 n ( t ) ± y 2 n ( t ) = 1 in the factorial ring R [ t ] / t 2 n . • There are additional restrictions, classic algebraic tools can not be applied. 11 / 28
Idea • Rewrite 2 n − 1 � t − ei i i i i i 2 k +1 i i i 2 n π � � ( x n ( t ) + i i i i i i i i i y n ( t )) ( x n ( t ) − i i i i i i i y n ( t )) = i i , k =0 where the right-hand side is the factorization of 1 + t 2 n over C . • Thus n − 1 � t − ei i i i i i i i i σ k 2 k +1 2 n π � � x n ( t ) + i i i i i i i i y n ( t ) = γ i , γ ∈ C , | γ | = 1 , k =0 where σ k = ± 1. 12 / 28
Best solution • The best solution should have the minimum error term ε . • It turns out that this happens if 1 β 1 = . sin π 2 n • Surprisingly, any solution for the elliptic case, for which x n is even and y n is odd, can be transformed to the hyperbolic solution by the map x n ( t ) �→ x n ( i i i i i i i i i t ) , y n ( t ) �→ − i i y n ( i i t ) . i i i i i i i i i i i i i i • In particular, this is true for the best solution too, thus it is enough to consider the elliptic case only. 13 / 28
Theorem Coefficients of the best solution for the elliptic case are k ( n − k ) � k 2 π � 2 n + π � P ( j , k , n − k ) cos n j ; k is even , α k = j =0 0; k is odd , 0; k is even , k ( n − k ) � k 2 π 2 n + π � β k = � P ( j , k , n − k ) sin ; k is odd , n j j =0 where P ( j , k , r ) denotes the number of integer partitions of j ∈ N with ≤ k parts, all between 1 and r, where k , r ∈ N , and P (0 , k , r ) := 1 . 14 / 28
Examples Table: Polynomial approximation of the unit circle and maximal normal (radial) error. n x n and y n error x 3 ( t )=1 − 2 t 2 3 2 y 3 ( t )=2 t − t 3 √ 2) t 2 + t 4 x 4 ( t )=1+( − 2 − y 4 ( t )=( √ 2+ √ 4 0 . 414213 √ √ 2)( t − t 3 ) 2+ 2 − √ √ 5) t 2 +(1+ 5) t 4 x 5 ( t )=1+( − 3 − 5 0 . 089987 √ √ 5) t 3 + t 5 y 5 ( t )=(1+ 5) t +( − 3 − √ √ 3) t 2 +2(2+ 3) t 4 − t 6 x 6 ( t )=1 − 2(2+ 6 0 . 013886 √ √ √ √ √ √ 3) t 3 +( 6) t 5 y 6 ( t )=( 2+ 6) t − 2(3+2 2+ . . . . . . . . . 1 . 07280 · 10 − 15 15 . . . It can be shown that the error is O ( n − 2 n ). 15 / 28
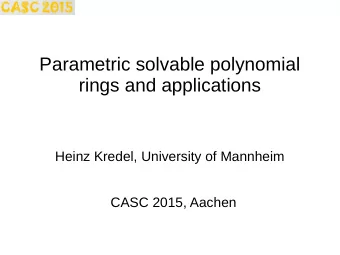
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle. 16 / 28
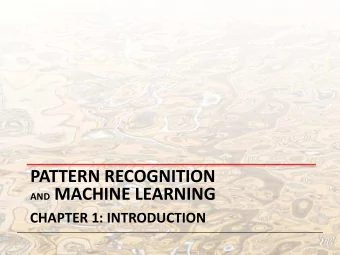
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle and its polynomial approximant for n = 2. 17 / 28
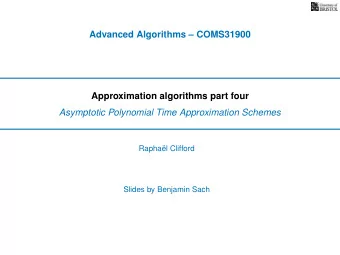
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle and its polynomial approximant for n = 3. 18 / 28
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle and its polynomial approximant for n = 4. 19 / 28
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle and its polynomial approximant for n = 5. 20 / 28
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle and its polynomial approximant for n = 6. 21 / 28
1.5 1.0 0.5 � 1.5 � 1.0 � 0.5 0.5 1.0 � 0.5 � 1.0 � 1.5 Figure: The unit circle and its polynomial approximant for n = 7. 22 / 28
Approximants and curvatures 1.0 0.8 0.6 0.4 0.2 � 1.0 � 0.5 0.0 0.5 1.0 23 / 28
Cycling Figure: Unit circle together with the cycles of the approximant for n = 20 and t ∈ [ − 1 , 1]. 24 / 28
H¨ ollig-Koch conjecture Conjecture A polynomial planar parametric curve of degree n can interpolate 2 n given points with an approximation order 2 n. Theorem H¨ ollig-Koch conjecture holds true for conic sections. Idea of a proof: • asymptotic approach, • a particular nonlinear system has to be studied, • an existence of a solution guarantees the optimal approximation order, • solution is obtained by canonical form and optimal solutions for ellipse and hyperbola. 25 / 28
Ellipse 0.5 1.0 1.5 � 0.5 0.5 1.0 � 0.2 � 0.2 � 0.4 � 0.4 � 0.6 � 0.6 � 0.8 � 0.8 2 x 2 + xy + 5 3 y 2 + y = 0 with Figure: Approximation of the ellipse 1 the best approximant of degree n = 5 , 7. 26 / 28
Hyperbola 1 1 2 4 6 8 10 12 2 4 6 8 10 12 � 1 � 1 � 2 � 2 � 3 � 3 5 x 2 + xy + 1 8 y 2 + y = 0 Figure: Approximation of the hyperbola 1 with the best approximant of degree n = 3 , 4. 27 / 28
Sphere approximation Particular polynomials of degree 5 in u and v yield: 5) u 2 + (1 + 5) v 2 + (1 + √ √ 5) u 4 )(1 + ( − 3 − √ √ 5) v 4 ) x ( u , v ) = (1 + ( − 3 − 5) u 3 + u 5 )(1 + ( − 3 − 5) v 2 + (1 + √ √ √ √ 5) v 4 ) y ( u , v ) = ((1 + 5) u + ( − 3 − √ √ 5) v 3 + v 5 z ( u , v ) = (1 + 5) v + ( − 3 − 28 / 28
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.