Hamels Formalism and Variational Integrators Dmitry Zenkov - PowerPoint PPT Presentation
Hamels Formalism and Variational Integrators Dmitry Zenkov Department of Mathematics, North Carolina State University with Ken Ball Nonholonomic Mechanics and Optimal Control Institute Henri Poincar Paris, November 2528, 2014
Hamel’s Formalism and Variational Integrators Dmitry Zenkov Department of Mathematics, North Carolina State University with Ken Ball Nonholonomic Mechanics and Optimal Control Institute Henri Poincaré Paris, November 25–28, 2014 Supported by the NSF Grants DMS-0908995 and DMS-1211454
Key Concepts • Ideal constraints and reaction forces (Hermann, d’Alembert, Euler, Lagrange, Fourier, Laplace...) • Euler–Lagrange equations and variational principles (Euler, Lagrange, Hamilton, Poincaré, Boltzmann, Hamel...) • Geometric and structure-preserving integration (Veselov, Marsden, Leok, Hairer, Lubich, Wanner...)
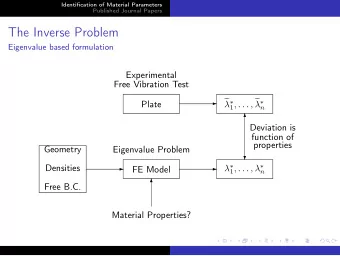
Lagrangian Mechanics with Constraints • Lagrangian (kinetic minus potential energy) L : TQ → R on the configuration space Q • Ideal velocity constraints • � � a ( q ), ˙ q = 0, for each q ∈ Q • Holonomic or nonholonomic • Can be replaced with reaction forces, work along the constrained directions vanishes • Define the constrained submanifold and a projection onto this submanifold • Euler–Lagrange equations (Lagrange [1788]) d ∂ L q − ∂ L ∂ q = λ a dt ∂ ˙ • Represent the dynamics in a covariant (coordinate-independent) form • Equivalent to the Lagrange–d’Alembert variational principle
Discrete Hamilton’s Principle and Variational Integrators • Discrete analogue of the continuous-time phase flow: Q × Q ∋ ( q k − 1 , q k ) �→ ( q k , q k + 1 ) ∈ Q × Q • Discrete Lagrangian: L d : Q × Q → R ; � h � q k + q k + 1 � , q k + 1 − q k L d ( q k , q k + 1 ) ≈ q ( t )) dt , usually L d ( q k , q k + 1 ) = hL L ( q ( t ), ˙ 2 h 0 • Discrete Hamilton’s principle: Trajectory q 0 , q 1 ,..., q N is defined by N − 1 L d ( q k , q k + 1 ) = 0, � where δ δ q 0 = δ q N = 0 k = 0 • Discrete Euler–Lagrange equations D 1 L d ( q k , q k + 1 ) + D 2 L d ( q k − 1 , q k ) = 0 • Lagrangian symplectic form preservation • Momentum preservation for systems with symmetry • Good long-term numerical behavior and no numerical dissipation
Constraint Discretization • Constraint preservation – important in multibody systems • Holonomic constraints: f ( q ) = 0 (continuous-time) , then f ( q k ) = 0 • Not so obvious for velocity/nonholonomic constraints • Discrete Lagrange–d’Alembert principle (Cortés and Martínez [2001], Fedorov and Zenkov [2005], McLachlan and Perlmutter [2006], Iglesias, Marrero, Martín de Diego, and Martínez [2008], Lynch and Zenkov [2009]) • Discrete constraints: A submanifold of Q × Q • A projection onto this submanifold • Both may be defined in a number of ways, leading to a variety of discrete Lagrange–d’Alembert principles
Constraint Discretization • Constraint preservation – important in multibody systems • Holonomic constraints: f ( q ) = 0 (continuous-time) , then f ( q k ) = 0 • Not so obvious for velocity/nonholonomic constraints • Discrete Lagrange–d’Alembert principle (Cortés and Martínez [2001], Fedorov and Zenkov [2005], McLachlan and Perlmutter [2006], Iglesias, Marrero, Martín de Diego, and Martínez [2008], Lynch and Zenkov [2009]) • Discrete constraints: A submanifold of Q × Q • A projection onto this submanifold • Both may be defined in a number of ways, leading to a variety of discrete Lagrange–d’Alembert principles
Nonholonomic Integrators • A trajectory of the contact point of a discrete balanced Chaplygin sleigh (a platform supported by a skate) may spiral down to a point, which is not what the continuous-time model predicts • Anticipated trajectories for proper discrete constraint � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
Nonholonomic Integrators • A trajectory of the contact point of a discrete balanced Chaplygin sleigh (a platform supported by a skate) may spiral down to a point, which is not what the continuous-time model predicts • Anticipated trajectories for proper discrete constraint � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
Equilibria and Structural Stability • Loss of the concept of ideal constraints after discretization, leading to a loss of structural stability • Possible changes in the dimension and stability of manifolds of relative equilibria • g t : M → M – phase flow of a continuous-time system of interest • h – time step • An exact integrator : A discrete dynamical system generated by g h : M → M • Real-life integrators are perturbations of ideal integrators
Equilibria and Structural Stability • Loss of the concept of ideal constraints after discretization, leading to a loss of structural stability • Possible changes in the dimension and stability of manifolds of relative equilibria • g t : M → M – phase flow of a continuous-time system of interest • h – time step • An exact integrator : A discrete dynamical system generated by g h : M → M • Real-life integrators are perturbations of ideal integrators
Equilibria and Structural Stability
Equilibria and Structural Stability • Preservation of the manifold of relative equilibria and their stability type • Importance for long-term numerical integration • Preservation of α - and ω -limit sets • Otherwise, structural instability of an integrator • Utilize Hamel’s formalism
Hamel’s Equations • u 1 ( q ),..., u n ( q ), n = dim Q – independent vector fields on Q ∈ R n relative to u 1 ( q ),..., u n ( q ) : • Velocity components ξ = � ξ 1 ,..., ξ n � q i ∂ q i = ξ i u i ( q ) q = ˙ ˙ • Lagrangian as a function of ( q , ξ ) : l ( q , ξ ) : = L � q , ξ i u i ( q ) � • Dynamics (Euler, Lagrange, Poincaré, Boltzmann, Hamel...): d ∂ l i j ( q ) ∂ l ∂ξ a ξ i + u j [ l ] ∂ξ j = c a dt • c k ( q ) = c a i j ( q ) – structure functions : � � u i ( q ), u j ( q ) i j ( q ) u a ( q ) • u j [ l ] – directional derivatives • Special case: Euler–Poincaré equations
Systems with Velocity Constraints • For a suitable frame, the constraints read ξ m + 1 = ··· = ξ n = 0 • Constrained Hamel equations d ∂ l i j ( q ) ∂ l ∂ξ a ξ i + u j [ l ], ∂ξ j = c a i , j = 1,..., m , a = 1,..., n , dt q = ξ i u i ( q ) coupled with ˙ • Systematic way of representing dynamics in redundant coordinates for holonomic systems • No Lagrange multipliers!!
Planar Pendulum x 2 + ˙ x 2 + y 2 = 1 • Planar pendulum in redundant coordinates: L = 1 y 2 ) − y , 2 ( ˙ • Differential-algebraic equations • Lack of constraint preservation!! 0.75 0.5 0.25 -1 -0.5 0.5 1 -0.25 -0.5 -0.75 -1
Variational Principles Hamilton’s Principle � satisfies the Hamel equations The curve � q ( t ), ξ ( t ) ∂ l i j ( q ) ∂ l d ∂ξ a ξ i + u j [ l ], ∂ξ j = c a a , i , j = 1,..., n dt if and only if � b δ l ( q , ξ ) dt = 0, where a δ q ( t ) = ζ j ( t ) u j ( q ( t )), ζ ( a ) = ζ ( b ) = 0, and δξ a ( t ) = ˙ i j ( q ( t )) ξ i ( t ) ζ j ( t ) ζ a ( t ) + c a Lagrange–d’Alembert Principle Constrained variations: ζ m + 1 = ··· = ζ n = 0 Constraints ξ m + 1 = ··· = ξ n = 0 , imposed after taking the variations
Variational Principles Hamilton’s Principle � satisfies the Hamel equations The curve � q ( t ), ξ ( t ) ∂ l i j ( q ) ∂ l d ∂ξ a ξ i + u j [ l ], ∂ξ j = c a a , i , j = 1,..., n dt if and only if � b δ l ( q , ξ ) dt = 0, where a δ q ( t ) = ζ j ( t ) u j ( q ( t )), ζ ( a ) = ζ ( b ) = 0, and δξ a ( t ) = ˙ i j ( q ( t )) ξ i ( t ) ζ j ( t ) ζ a ( t ) + c a Lagrange–d’Alembert Principle Constrained variations: ζ m + 1 = ··· = ζ n = 0 Constraints ξ m + 1 = ··· = ξ n = 0 , imposed after taking the variations
Discrete Hamel’s Equations • Phase space: T R n • Discrete Lagrangian: l d ( q k + 1/2 , ξ k , k + 1 ) : = hl ( q k + 1/2 , ξ k , k + 1 ) • l ( q , ξ ) – continuous-time Lagrangian • h – time-step � – discrete analogue of position q (midpoint rule) • q k + 1/2 : = 1 � q k + 1 + q k 2 • ξ k , k + 1 – discrete analogue of velocity ξ
Discrete Hamel’s Equations Discrete Hamilton’s Principle (Ball and Zenkov [2014]) The sequence ( q k + 1/2 , ξ k , k + 1 ) satisfies the discrete Hamel equations if and only if N − 1 � l d ( q k + 1/2 , ξ k , k + 1 ) = 0, δ k = 0 where δ q k + 1/2 = 1 ζ a k + 1 + ζ a � � 2 u a ( q k + 1/2 ) ζ 0 = ζ N = 0, and , k ζ j k + 1 + ζ j δξ a k , k + 1 = 1 ζ a k + 1 − ζ a + 1 2 c a i j ( q k + 1/2 ) ξ i � � � � , h k k , k + 1 k
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.