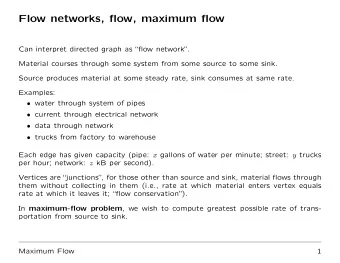
Gradient Flow Source Separation and Localization Gert Cauwenberghs - PowerPoint PPT Presentation
Gradient Flow Source Separation and Localization Gert Cauwenberghs Johns Hopkins University gert@jhu.edu 520.776 Learning on Silicon http://bach.ece.jhu.edu/gert/courses/776 G. Cauwenberghs 520.776 Learning on Silicon Gradient Flow Source
Gradient Flow Source Separation and Localization Gert Cauwenberghs Johns Hopkins University gert@jhu.edu 520.776 Learning on Silicon http://bach.ece.jhu.edu/gert/courses/776 G. Cauwenberghs 520.776 Learning on Silicon
Gradient Flow Source Separation and Localization • Introduction – Spatial diversity in array signal processing – Directional hearing at sub-wavelength scale • Broadband Localization and Separation – From delays to temporal derivatives – Gradient Flow – Equivalent static linear ICA problem – Multipath extension and convolutive ICA • Performance Analysis – Scaling properties – Cramer-Rao bounds – Differential sensitivity • Bearing Estimation – Micropower mixed-signal VLSI implementation – Experimental GradFlow / ASU acoustic bearing estimation • Independent Component Analysis – Micropower mixed-signal VLSI implementation – Experimental acoustic source separation • Hearing Aid Implications G. Cauwenberghs 520.776 Learning on Silicon
Blind Separation and Beamforming Localization • Modeling – Source signals propagate as traveling waves – Spatially diverse sensor array receives linear mixtures of time- delayed sources – The time delays determine the direction coordinates of the waves relative to the sensor geometry • Methods – Super-resolution techniques estimate the time delays in the spectral domain, assuming narrowband sources – J oint estimation of multiple broadband sources and their time delays is possible in an extended ICA framework, but requires non-convex optimization leading to unpredictable performance G. Cauwenberghs 520.776 Learning on Silicon
Biomechanics of Tympanal Directional Hearing – Parasitoid fly localizes sound- emitting target (cricket) by a beamforming acoustic sensor of dimensions a factor 100 smaller than the wavelength. – Tympanal beamforming organ senses acoustic pressure gradient, rather than time delays, in the incoming wave Robert, D., Miles, R.N. and Hoy, R.R., “Tympanal hearing in the sarcophagid parasitoid fly Emblemasoma sp .: the biomechanics of directional hearing,” J. Experimental Biology , v. 202, pp. 1865- 1876, 1999. G. Cauwenberghs 520.776 Learning on Silicon
Directional Selectivity in Hearing Aids www.oticon.com • Two microphones allow for one null angle in directionality pattern • Adaptive beamforming allows to steer the null to noise source • Presence of multiple noise sources requires source localization and separation with multiple microphones G. Cauwenberghs 520.776 Learning on Silicon
Wave Propagation Traveling wave (e.g., acoustic, sonar, RF, …) in free space: = + τ ( , ) ( ) ( ( )) S r t A r s t r In the far field limit: ≡ ( ) 1 A r τ = ⋅ 1 ( ) r r u c sensor r u τ ( r ) source G. Cauwenberghs 520.776 Learning on Silicon
Temporal Series Expansion + τ = + τ + τ + 1 2 & & & K ( ( )) ( ) ( ) ( ) ( ) ( ) s t r s t r s t r s t 2 delay 0 th -order 1 st -order – Reduces the problem of identifying time delayed source mixtures to that of separating static mixtures of the time-differentiated 2 nd -order 3 rd -order 4 th -order sources – Implies sub- wavelength geometry of the sensor array G. Cauwenberghs 520.776 Learning on Silicon
Spatial Sensing Sensor distribution: e.g., for a planar sensor geometry: = + r p r q r 1 2 pq sensor p , q discrete q – sensor array : sensor r array r 2 u – distributed sensor: p , q continuous p r 1 Source delays: τ = τ + τ p q τ ( r ) 1 2 pq with: τ = ⋅ 1 r u 1 1 c τ = ⋅ 1 r u 2 2 c the direction coordinates of source relative to sensor geometry G. Cauwenberghs 520.776 Learning on Silicon
Wave Flow: Spatial and Temporal Gradients Linear flow: Sensor signals: = + τ = + τ + τ + & K ( ) ( ) ( ) ( ) ( ) x t s t s t p q s t 1 2 pq pq Gradients: ξ = | = ( ) x s t 00 pq = = ⎡ ⎤ 0 p q 1 ∂ x ⎢ ⎥ | ξ = = τ = τ pq & & ( ) s t ( ) s t ⎢ ⎥ ∂ 10 1 1 = = p 0 p q ⎢ ⎥ τ ⎣ ⎦ ∂ x | 2 ξ = = τ pq & ( ) s t ∂ 01 2 = = q 0 p q Higher-order flow: + ∂ i j x | + ξ = = τ τ pq ( ) i j i j ( ) ( ) ( ) s t ∂ ∂ 1 2 ij i j = = p q 0 p q G. Cauwenberghs 520.776 Learning on Silicon
Miniature Sensor Arrays Finite-difference gradient approximation on a grid: e.g., planar array of 4 sensors: + + + ≈ ξ ≈ 1 ( ) ( ) x x x x s t − − 1 , 0 1 , 0 0 , 1 0 , 1 00 4 − ≈ ξ ≈ τ 1 & ( ) ( ) x x s t − 1 , 0 1 , 0 10 1 2 − ≈ ξ ≈ τ 1 & ( ) ( ) x x s t − 0 , 1 0 , 1 01 2 2 ξ 00 ξ 10 1cm G. Cauwenberghs 520.776 Learning on Silicon
Gradient Flow Localization τ 2 ξ 10 τ 1 ξ 01 + τ τ & ( ) ( t ) s t & τ 2 ξ s 00 t t τ 1 + [ ] & ξ ≈ s ( t ) d & ( ) s t + + 00 dt + ξ ≈ τ & ( ) - + s t 10 1 + τ 1 ξ ≈ τ & τ 2 ( ) s t 01 2 - • Gradient flow bearing resolution is fundamentally independent of aperture • Resolution is determined by sensitivity of gradient acquisition – Mechanical differential coupling (Miles et al.) – Optical differential coupling (Degertekin) – Analog VLSI differential coupling G. Cauwenberghs 520.776 Learning on Silicon
Gradient Flow Localization and Separation τ l 2 ξ 10 τ l 1 ξ 01 + τ τ & ( ) ( t ) s t & τ l 2 ξ s 00 t t τ l 1 ∑ + [ ] & ξ ≈ s ( t ) l d & ( ) s t + + 00 dt l + ∑ ξ ≈ τ l l & ( ) s t - + 10 1 l + ∑ τ l ξ ≈ τ l l & ( ) τ l s t 1 01 2 2 l - • Gradient flow bearing resolution is fundamentally independent of aperture • Resolution is determined by sensitivity of gradient acquisition – Mechanical differential coupling (Miles et al.) – Optical differential coupling (Degertekin) – Analog VLSI differential coupling • Multiple target tracking with independent component analysis (ICA) G. Cauwenberghs 520.776 Learning on Silicon
Separation and Localization Source mixtures are observed with additive sensor noise: L = ∑ + τ + l l ( ) ( ) ( ) x t s t n t pq pq pq = l 1 Gradient flow reduces to a static (noisy) mixture problem: ⎡ & ⎤ ⎡ ⎤ ξ ν ⎡ ⎤ ⎡ ⎤ 1 & & L 1 1 ( ) s t 00 00 ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ξ = τ τ + ν 1 L L M ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 10 1 1 10 ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ξ τ τ ν 1 L & L L ⎣ ⎦ ( ) ⎣ ⎦ s t ⎣ ⎦ ⎣ ⎦ 01 2 2 01 ↓ ↓ ↓ ↓ = + x A s n observations direction sources noise (gradients) (time-differentiated) (gradients) vectors solved by means of linear static ICA G. Cauwenberghs 520.776 Learning on Silicon
Gradient Flow Acoustic Separation Outdoors Environment – 4 microphones within 5 mm radius – 2 male speakers at 0.5 m, lawn surrounded by buildings at 30 m 1cm G. Cauwenberghs 520.776 Learning on Silicon
Gradient Flow Acoustic Separation Indoors Environment – 4 microphones within 5 mm radius – 2 male speakers at 0.5 m, reverberant room of dimensions 3, 4 and 8 m 1cm G. Cauwenberghs 520.776 Learning on Silicon
Multipath Wave Propagation Multipath convolutive wave expansion: = ∫∫ θ θ − θ + τ θ ( , ) ( , , ) ( ( , , )) S r t d u d A r u s t r u In the far field: θ ≡ θ ( , , ) ( , ) A r u A u τ θ ≡ τ = ⋅ 1 ( , , ) ( , ) r u r u r u c sensor r θ u path direction path time lag τ ( r,u ) source G. Cauwenberghs 520.776 Learning on Silicon
Multipath Gradient Flow Separation and Localization Gradient Flow, uniformly sampled above the Nyquist rate: ∑ ∑ & ξ ≈ α − + ν l l & & [ ] [ ] [ ] [ ] i j s i j i 00 00 l j ∑ ∑ ξ ≈ τ − + ν l l & [ ] [ ] [ ] [ ] i j s i j i 10 1 10 l j ∑ ∑ ξ ≈ τ l − + ν l & [ ] [ ] [ ] [ ] i j s i j i 01 2 01 l j yields a mixing model of general convolutive form: = ∑ ⋅ − + [ ] [ ] [ ] [ ] x A s n i j i j i j with moments of multipath distributions over sensor geometry: − 1 ( n ) T ∫ ∫ α = θ θ l s l 2 [ ] ( , ) j d u d A u sensor θ = − 1 ( ) u n T q sensor s 2 array r 2 r − 1 ( ) ∫ ∫ n T u τ l = θ θ τ s l 2 [ ] ( , ) ( , ) j d u d A u r u 1 1 r 1 θ = − 1 ( ) u n T p s 2 − 1 ( ) ∫ ∫ n T τ = θ θ τ l l s 2 [ ] ( , ) ( , ) u u r u j d d A τ ( r,u ) = c r ⋅ 1 2 2 u θ = − 1 ( ) u n T s 2 G. Cauwenberghs 520.776 Learning on Silicon
Recommend













More recommend
Explore More Topics
Stay informed with curated content and fresh updates.