Geometric Methods in Representation Theory Columbia, Missouri, - PowerPoint PPT Presentation
Geometric Methods in Representation Theory Columbia, Missouri, November 23-25, 2014 Varieties of Invariant Subspaces of Linear Operators Markus Schmidmeier (Florida Atlantic University) . . . . . . . . . . . . . . . . . . .
Geometric Methods in Representation Theory Columbia, Missouri, November 23-25, 2014 Varieties of Invariant Subspaces of Linear Operators Markus Schmidmeier (Florida Atlantic University) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ϕ . . . . . . . . . . . . mg sin( ϕ ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . mg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . • . . . . u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A report on a joint project with Justyna Kosakowska (Nicolaus Copernicus University)
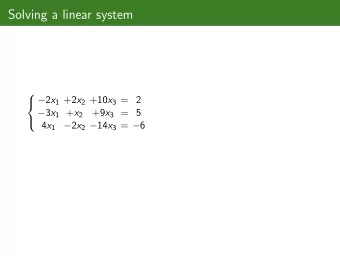
Short exact sequences of nilpotent linear operators Definition: For α a partition and k a field, we denote the nilpotent linear operator of type α by � k [ T ] / ( T α i ) . N α = i For fixed partitions α , β , γ , we are interested in short exact sequences of nilpotent linear operators f 0 − → N α − → N β − → N γ − → 0 Definition: V β α,γ = { f : N α → N β | Cok( f ) ∼ = N γ } V β α,γ is a constructible subset of the affine variety Hom k ( N α , N β ).
Aim ◮ Motivation I: Varieties of type V β α,γ occur in a applications. ◮ Motivation II: They are interesting geometrically. ◮ The components: Study the partition • V β � α,γ = V Γ Γ LR-tableau of shape ( α, β, γ ) of V β α,γ into irreducible components V Γ . ◮ The relation: Introduce the closure relation V ˜ Γ ∩ V Γ � = ∅ to see how the components are linked. ◮ Example: Review the case α 1 ≤ 2 (all parts of α are at most 2). ◮ Main result: Compare this relation on the set of LR-tableaux of shape ( α, β, γ ) with combinatorial relations ≤ box , ≤ part and algebraic relations ≤ ext , ≤ hom . ◮ Part of the proof: Show that ≤ closure implies ≤ part .
Motivation I: Control Systems A linear time invariant dynamical system Σ is given by the differential equations � dx = Bx + Au dt Σ : y = Cx u ( t ) ∈ C m is the input or control x ( t ) ∈ C n where the state and y ( t ) ∈ C p the output at time t .
Motivation I: Control Systems A linear time invariant dynamical system Σ is given by the differential equations � dx = Bx + Au dt Σ : y = Cx u ( t ) ∈ C m is the input or control x ( t ) ∈ C n where the state and y ( t ) ∈ C p the output at time t . Time invariance means that A ∈ C n × m , B ∈ C n × n , and C ∈ C p × n , so we are dealing with a linear representation: � · B · A · C C m C n → C p Σ : − → −
Motivation I: Inverted Pendulum In every text book on control theory, you will find this example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ϕ . . . . . . . . . . . . . . . . . . . mg sin( ϕ ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . mg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . • . . . . . . . . . . . . . u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motivation I: Inverted Pendulum In every text book on control theory, you will find this example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ϕ . . . . . . . . . . . . . . . . . . . mg sin( ϕ ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . mg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . • . . . . . . . . . . u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . After linearization, the differential equation m ¨ ϕ = mg sin( ϕ ) + u becomes m ¨ ϕ = mg ϕ + u . So the assignments � ϕ � x = , y = ϕ, u = u ϕ ˙ lead to the dynamical system � 0 1 � 0 � dx � · x + � · u = g 0 dt 1 / m Σ : y = (1 0) · x Challenge: Apply torque u to bring and keep the pendulum in the vertical position.
Motivation I: The Kalman Decomposition A linear time-invariant dynamical system � T a c Σ : − → − → V out V in V gives rise to two T -invariant subspaces of V : k ≥ 0 im T k a = � the controlable subspace V C k ≥ 0 ker cT k = � the non-observable subspace V ¯ O
Motivation I: The Kalman Decomposition A linear time-invariant dynamical system � T a c Σ : − → − → V out V in V gives rise to two T -invariant subspaces of V : k ≥ 0 im T k a = � the controlable subspace V C k ≥ 0 ker cT k = � the non-observable subspace V ¯ O � The Kalman embedding V C ∩ V ¯ O ⊂ V C ⊂ V is a system of two invariant subspaces. Putting V K = V C / V C ∩ V ¯ O , we obtain a completely controlable and completely observable system, the minimal realisation: � ¯ T ¯ a c ¯ Σ min : V in − → V K − → V out
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.