Filtering vs Convolution 16-385 Computer Vision Filters we have - PowerPoint PPT Presentation
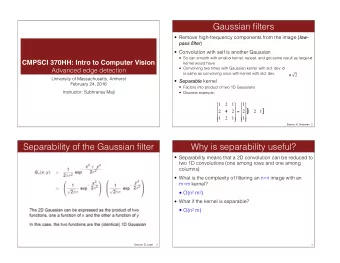
Filtering vs Convolution 16-385 Computer Vision Filters we have learned so far Gaussian filter The Box filter 1 2 1 1 1 1 1 1 2 4 2 1 1 1 9 16 1 2 1 1 1 1 Sobel filter Laplace filter 1 0 -1 0 1 0 2 0 -2
Filtering vs Convolution 16-385 Computer Vision
Filters we have learned so far … Gaussian filter The ‘Box’ filter 1 2 1 1 1 1 1 1 2 4 2 1 1 1 9 16 1 2 1 1 1 1 Sobel filter Laplace filter 1 0 -1 0 1 0 2 0 -2 1 -4 1 0 1 0 1 0 -1
Filtering vs Convolution output filter image filtering X h = g ⊗ f h [ m, n ] = g [ k, l ] f [ m + k, n + l ] (cross-correlation) k,l What’s the difference? X h [ m, n ] = g [ k, l ] f [ m − k, n − 1] convolution h = g � f k,l Credit: Steve Seitz
Filtering vs Convolution output filter image filtering X h = g ⊗ f h [ m, n ] = g [ k, l ] f [ m + k, n + l ] (cross-correlation) k,l filter flipped vertically and horizontally X h [ m, n ] = g [ k, l ] f [ m − k, n − 1] convolution h = g � f k,l
Filtering vs Convolution output filter image filtering X h = g ⊗ f h [ m, n ] = g [ k, l ] f [ m + k, n + l ] (cross-correlation) k,l filter flipped vertically and horizontally X h [ m, n ] = g [ k, l ] f [ m − k, n − 1] convolution h = g � f k,l Recall... Suppose g is a Gaussian filter. 1 2 1 How does convolution differ from filtering? 1 2 4 2 16 1 2 1
Commutative a � b = b � a . Associative ((( a � b 1 ) � b 2 ) � b 3 ) = a � ( b 1 � b 2 � b 3 ) Distributes over addition a � ( b + c ) = ( a � b ) + ( a � c ) Scalars factor out � a ⇥ b = a ⇥ � b = � ( a ⇥ b ) Derivative Theorem of Convolution
can precompute this Derivative Theorem of Convolution Input saved how many operations? Derivative of Gaussian Output
Recall ... Input Gaussian Smoothed input Derivative Output
Recommend





![Convolution Layers Convolution Layers In [1]: from mxnet import autograd, nd from mxnet.gluon](https://c.sambuz.com/888999/convolution-layers-convolution-layers-s.webp)

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.